
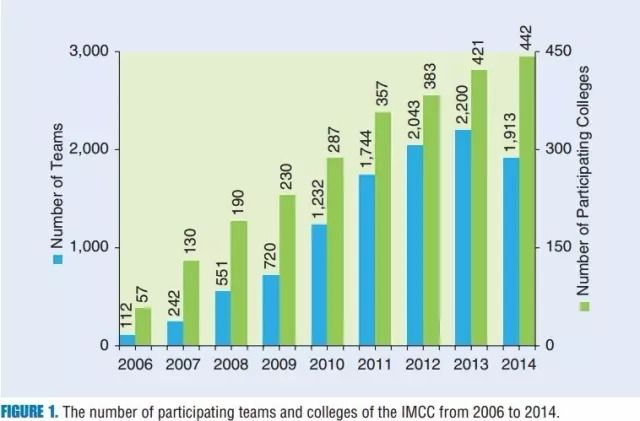
The Intelligent Model Car Competition (IMCC) of China is an annual collegiate contest where student teams design, build, and race a model car around a track, and the fastest car that completes the track without failure wins [1]. The IMCC is in collaboration with the global NXP Cup Challenge, which was formerly known as the Freescale Cup Challenge until the acquisition of Freescale Semiconductor Inc. by NXP Semiconductors [2]. Creating this smart, autonomous car requires students to develop the hardware and software of motor control to propel and steer their model cars. It provides a collaborative, competitive, and hands-on way for students to learn about and make a synergistic use of theories and techniques from undergraduate engineering studies, such as sensing and control, circuit design and implementation, and embedded system and software programming. The first competition, formerly known as the Smart Car Race, began in 2003 in South Korea with 80 student teams. Since then, the NXP Cup has expanded to China, India, Malaysia, Latin America, North America, and Europe, engaging hundreds of schools and tens of thousands of students a year [2], [3]. China started its nationwide college-level smart car race in 2006. It has undergone a rapid growth since then and has just celebrated its tenth anniversary. The challenges and ingenuity posed by this competition has attracted an increasing number of students year by year. As shown in Figure 1, participation has risen from about 112 teams of 57 colleges in 2006 to over 2,000 teams of more than 400 colleges in recent years. For the past five years, more than 30,000 students have attended the contest annually; and so far this decade-long race has engaged more than 150,000 students in total, providing them a valuable hands-on educational experience of engineering. As members of the organizing committee of the IMCC, in this article we provide an overview and highlights of the competition tasks and rules, the role that signal processing plays, and the curricula that is built on the competition.
Motivation of a nationwide engineering competition
The launch of the IMCC was supported by the Ministry of Education of China and its Committee of Education Instruction of Automation Specialty. A main motivation to launching the competition was that the engineering curricula at the college level were too theoretical and generally too slow to catch up to the fast pace of the contemporary technological development. As a result, students tended to focus more on test-oriented skills, and did not pay enough attention nor had enough hands-on opportunities to solve real-world engineering problems in a team setting; they would lack curiosity and interest and were not sufficiently motivated to learn and innovate. These problems are not unique in China, as the higher education in engineering in many other countries around the world have faced similar challenges. The NXP-sponsored model car competition helps address this problem and bring hands-on engineering education to many college campuses around the world. The IMCC in China has several notable characteristics, including the competition setup, the rules, and the evaluation criteria that will be discussed later in this article. It has attracted an overwhelming number of students over the past decade, and its scale is now the largest in the world. What initially began as one competition category has now expanded to six, and the competition tasks have been diversified. Each category has challenges that are suitable for students at a different stage in their college study, so that students ranging from freshmen to seniors can all participate. Along with the IMCC, a large number of microcontroller unit (MCU) teaching labs, textbooks, and innovation training centers have been developed in many universities. The development of such educational material and infrastructure have enabled and expanded hands-on training for engineering students nationwide.

Tasks and rules of the model car competition
All racing teams use a standard kit of model car designated by the organizing committee. Team members are required to design and develop their own hardware and software for their cars [4], [5]. As mentioned previously, each finished model car must be capable of selfnavigating along a challenging racetrack as fast as it can. The teams will be ranked according to the time taken by the model car to complete one round of the racetrack. Only undergraduate students are permitted to participate in this nationwide competition in China. Each team is allowed to have up to three students and no more than two faculty advisors. Typically, as shown in Figure 2, an annual competition lasts ten months as an extracurricular activity, from launching in the previous November to the division competition in July, and to the final race in August. Early rounds of the competition are carried out in eight racing divisions covering different geographic areas in China. The top teams from each race division are qualified for the final race. During the final race, speed-based race sessions are held in which the time for each finalist car to complete one round of the racetrack is used to rank the teams; in addition, an open-ended competition is held concurrently, with innovation themes related to future industrial intelligent cars to encourage students to develop creative ideas and implementations.

Basic elements of the racetrack
With the exception of a beacon-based sensing category to be discussed later in this section, the racetracks are composed of several kinds of elements: straight sections, curved sections, crossroads, hills, and roadblocks (see Figure 3). The characteristics of the racetrack and its elements are given in the rules released at the launch of the competition. A detailed graph of the racetrack is revealed to the teams onsite right before the start of the competition. The sensing and control algorithms embedded in the race cars are expected to work with all these elements and different combinations of them.
Competition categories
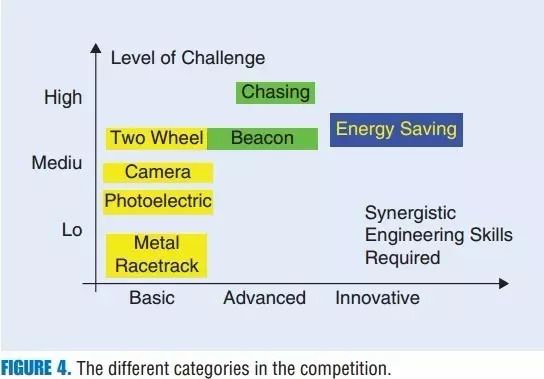
To enable self-navigation of model cars, different kinds of sensors are explored to capture position signals for further processing. Based on the sensor types and race tasks, the competition is divided into several categories that have different levels of technical challenge, as illustrated in Figure 4. The basic categories only require some elementary knowledge of signal processing, control, and circuits, thus allowing younger undergraduate students to participate; on the other hand, the advanced and creative categories may use the technical knowledge and skills from students’ design training or capstone projects. The wide variety of categories gives students an opportunity to participate in several competitions during their college career, as they grow in knowledge, experience, and maturity. In what follows, we briefly review the characteristics of each competition category.
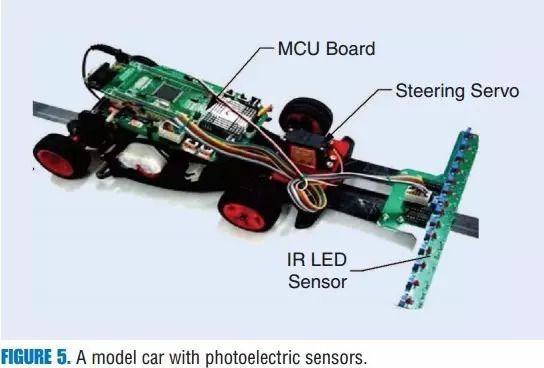
Photoelectric sensing:In this competition category, a model car can be equipped with photoelectric sensors, such as an infrared (IR) lightemitting diode sensor and linear charge-coupled device (CCD) sensors, to detect the racetrack. Figure 5 shows a model car equipped with photoelectric sensors. The signals acquired by such sensors are typically binary or one-dimensional. Thus, the algorithms for signal processing and control decisions can be relatively simple compared to the other categories. This category is suitable for younger students with primary engineering knowledge.

Camera sensing:Planar-array CCD or complementary metal–oxide–semiconductor (CMOS) cameras are used to pilot the car in this category. A model car equipped with a camera is shown in Figure 6. Two-dimensional image acquisition and processing requires more computing capabilities than for the other sensing categories. Student teams in this category often equip their model cars with a high-performance 32-bit MCU with larger random access memory (RAM) storage and higher million instructions/second in computing power. Using image processing and computer vision algorithms, it is possible for a model car to deal with a more complex track layout, predict the direction of the road, and plan for its motion on the racetrack. As a camera can capture images farther ahead of the racetrack, camera cars are usually the fastest among all of the cars in the competition categories.
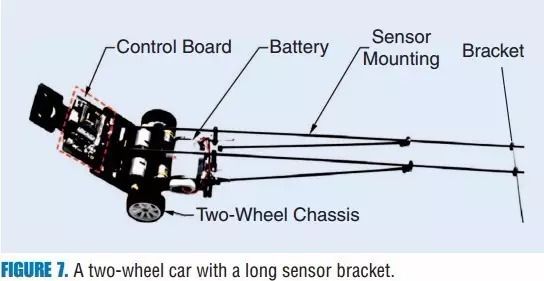
Two-wheel car:There are two specific characteristics and challenges in this competition category. First, the model car only has a total of two wheels, left and right. To propel the car to move upright, sensors such as the gyroscope and accelerometer need to be employed, and the signals from these sensors must be acquired and processed properly in real time. Second, instead of putting visible black edge lines on the racetrack as in the other competition categories, one enameled wire with a diameter of 0.5 mm is laid along the center of the racetrack to guide the movement of the model car. Alternating current (ac) (100 mA, 20 kHz) flows along the wire, which generates an oscillating magnetic field on the racetrack. With such a racetrack design, one way to guide the model car is to use two inductor coils to sense the varying magnetic field.
To sense the racetrack, detection coils can be mounted to the car on a well-designed extending bracket. The battery can also be located low to deliberately lower the center of gravity of the car. As shown in Figure 7, these arrangements can increase the stability and the racing speed of the car.
Compared to the other competition categories, the signal processing and control methods applied in this category are generally more sophisticated for the race car to maintain its balance while moving smoothly on the racetrack. The Kalman filter algorithm is often used by participating teams to calculate the angle of the car position, and a double closed-loop speed control is implemented to drive the wheels.
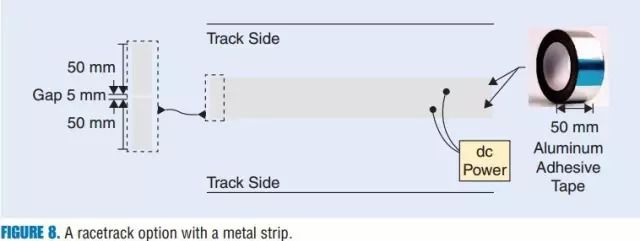
Metal racetrack:For the metal racetrack competition category, the racetrack is laid with two parallel strips of aluminum foil, and a direct current (dc) power of 12 V 5 A is applied to the two aluminum strips. A model car participating in this competition category is required to guide itself by detecting the metal foils, and is also allowed to pick up electricity through the aluminum foils to drive its motor. The racetrack components are shown in Figure 8. The main competition goal of this category is to design a highly power-efficient intelligent model car. The judging criteria is not only by the speed of the car, but also by the total energy consumed during the competition.
To sense the guiding metal strips, several coils may be mounted in front of the race car, and a high-frequency ac signal from an oscillator circuit may be applied on the coils. The alternating electromagnetic field generated by the coils will induce the eddy current on the surface of the metal strips. In turn, the eddy current will change the amplitude and frequency of the ac in the coils. The specific variation depends on the related distance between the detecting coils and the metal strips. By using the amplitude demodulation or frequency demodulation, the car can detect its deviation from the guiding strips. Such sensing and signal processing methods may be implemented by circuit or by software.

Two-car: chasing Sensors used in this competition category are similar to the one for camera sensing. Here, each team is required to design two model cars to run one after another on the racetrack. Figure 9 shows two students preparing their chasing cars on the racetrack.
The final score (T) contains two portions: the total time (T1) for the two cars to complete a round, and the lag (T2) between them as they cross the finishing line. The formula for calculating the total score is T T = +1 5T2. To perform well in this competition, the two race cars should coordinate well by wireless communication. They must avoid colliding with each other while at the same time avoid being too far apart. This is the most challenging among all the competition categories.
Detecting the distance between the two cars is crucial in this competition. Usually, an ultrasonic signal and an IR signal are sent back simultaneously from the leading car. The second car can determine the distance by detecting the time-lag between the receiving ultrasonic and IR signals.
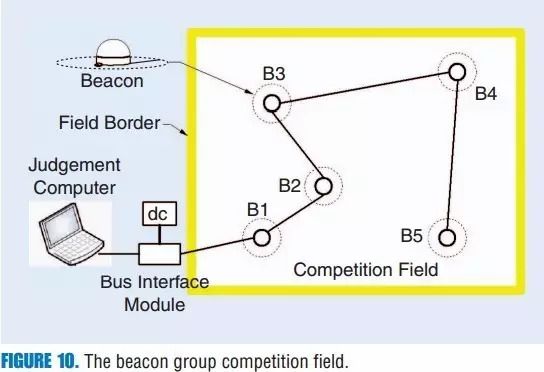
Beacon-based racing:Unlike the other competition categories, there is no visible racetrack in this competition. Several beacons are distributed on the competition field and can be turned on by a referee system in a random sequence. Model cars should move to approach the lighting beacons. As long as a car moves inside the detection region of a beacon, the referee system will turn on the light of the next beacon. The arrangement of the beacon group field is illustrated in Figure 10.
The challenges of this competition include detecting targets that may be located relatively farther away from the race car, avoiding collision onto the beacon during the navigation, and planning a motion path for the race car.
Many participating teams have used a camera to search for the beacon. To differentiate from the surrounding light sources, the beacon flashes at about 10 Hz. This flash pattern is used to locate the beacon in the middle of ambient light. Participants have shown that target detection based on the frame difference image is a robust approach to locate the beacon in most types of environments.
Forward-looking innovation category:To foster creative thinking, the IMCC also has an open-ended category inviting teams to contribute innovative ideas and designs. Different themes are set up for each year. The most recent competition’s theme, for instance, was innovative designs on energy saving and a future smart city. Teams are required to submit a detailed technical report as well as a video of their work. The top teams are invited to the final race each August to showcase their work. Figure 11 shows a winning entry of a recent competition, where the student team designed and prototyped a parking facility in a futuristic community.

Signal processing techniques used in the competition
There are many different technologies used in a model car to compete in the respective category [6], and signal processing is one of the key components. Students receive hands-on training and strengthen their understanding of signal processing through the competition.
Signal sensing and sampling: As the model car is controlled by the MCU, almost all signals coming from the sensors would be sampled and converted into digital. Some of these signals are already digitized by the sensor module themselves so that they can be passed directly from the sensor to the data transfer port of the MCU. Some other sensing signals are obtained in an analog form, for example, the photoelectric sensor signal and induction coils signals. These signals need to be sampled after conditioning circuits by an analog-to-digital converter (ADC) module on the MCU.
As students learned from fundamental signal processing courses, the sampling frequency need to be properly determined according to the property of the signal. For example, the signal that comes from the induction coils in the two-wheel competition has an alternate voltage with a fixed frequency of 20 kHz. It is a narrow-band signal, and thus with proper processing, it could be sampled at a frequency that is far lower than the nominal Nyquist frequency. Based on these sampled data, the amplitude of the signals can be determined.
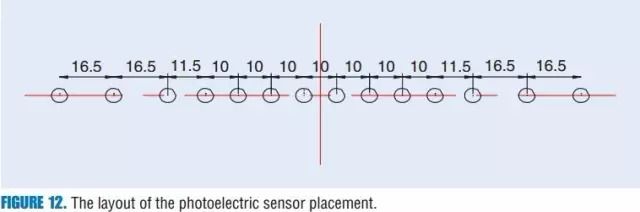
Another example of sampling is to detect the center of the racetrack. In the photoelectric sensing competition, the sensors sample the light intensity of the racetrack surface spatially at several isolate spots. As the number of the sensors is confined to no more than 16 by the competition rules, the arrangement of the sensors must be well designed to increase sampling range and accuracy. Figure 12 shows a common layout of photoelectric sensors in the competition, whereby the sensors are arranged in one line in front of the car with different spacing between them, and the space in the middle is smaller than the outer ones. This kind of nonuniform sampling was shown to perform better than the uniform spatial sampling in the competition.
Denoising and parameter estimation:An important task of the competition is to take the sensing signals that are often noisy or distorted and process them to extract important parameters or other useful information and pass it on to the control and decision mechanism to race the model car.
Student teams have employed a variety of filters in the model car control systems to deal with the interference coming from external sources or onboard circuits. They have used both analog filters to condition the sensing signals, and digital filters implemented by embedded software for linear, nonlinear, or adaptive signal processing.
The main source of interference on board comes from the motor driver circuit with high peak currents up to 20 A. The noise sparks travel through the power supply line into the control circuitry, causing erratic behaviors. Most of the noise can be reduced by using analog filters in the sensing and power circuits. However, some noise is still left in the sensing signal and is sampled into the MCU. This remaining noise can be dealt with by digital signal processing.
Other noise sources may also be seen in each specific competition setup. For example, we previously mentioned that in the two-wheel competition, a model car must keep an upright pose while running along the racetrack. An inertial measurement unit (IMU) is mounted on the chassis to measure the inclination of the model car. The IMU outputs two signals: the gyroscope signal that gives the angular speed, and the accelerometer signal that provides information on the “down” direction. Although the dip angle of the car can be calculated according to the accelerometer signal alone, the movement of the car produces much noise mixed with the angular position. To address this problem, student teams have employed Kalman filters when computing the angular position (shown in Figure 13), combining the gyroscope and accelerometer signals in a denoised fashion. Some student teams have simplified the filtering algorithm to allow for more efficient estimation of the attitude angle of a two-wheel race car. In addition, one of the teams in the two-wheel competition carefully studied the noise levels in the IMU data when the pulse-width modulation (PWM) voltage with different duty ratio is applied to drive the motors. They incorporated this into a Kalman filter implementation to further reduce the noise when estimating the pose of the model car.

Image processing and computer vision:Thanks to the power of visual sensing, student teams prefer using cameras to guide their model cars in the competition categories of camera sensing, chasing, and beacon-based racing. By using a camera to continuously capture images of the racetrack, a wide range of information about the car’s current state and potential future situation can be inferred.
Detection range is a key factor affecting the achievable speed of a self-navigating race car. Because there exists a constant delay when a servo changes the direction of the front wheels of a race car, detection in advance can compensate this delay. The sooner the detection of the curve on the racetrack is, the higher speed the race car can run without going out of the bounds of the racetrack. Image processing from camera data also enables the extraction of more detailed information of the racetrack. For example, detecting the obstacles on the racetrack, including hills and roadblocks, is generally easier and more accurate by a camera than by other types of sensors.
Despite the aforementioned advantages, there are challenges in performing image processing on a low-cost embedded platform. The main limitation comes from the shortage of RAM memory capacity and the limited computing power of the MCU. To strike a good tradeoff between the processing speed and accuracy, it is desirable for the MCU to subsample the image into a lower resolution to work with, and such low-resolution low-quality image poses a challenge for student teams to reliably detect the racetrack and other elements on the track.
Figure 14 shows an example scene of a model car on the racetrack. Inset (a) is the binary image captured in the MCU’s RAM. Inset (b) shows the center line of the racetrack extracted from the image above by the image processing algorithm.

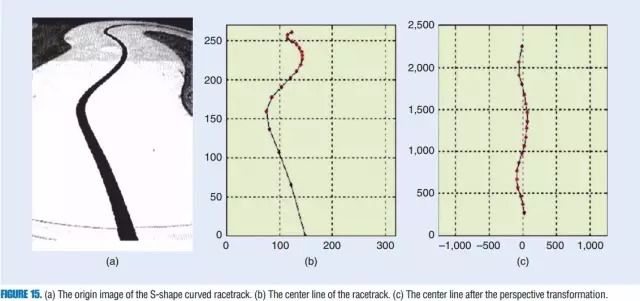
The image captured by the camera on board of a race car also has a large distortion caused by the low viewing angle of the camera. To obtain more accurate information of the road, a perspective transformation is applied upon the image to correct such distortion. Figure 15 shows the effect of perspective transformation. Figure 15(a) reveals the original grayscale image; (b) shows the center line of the racetrack extracted from the gray image; and (c) gives the correct center line after the perspective transformation.
In summary, signal processing techniques are applied extensively on various aspects of the race cars. This competition allows students to practice their knowledge of signal processing in task-oriented training scenarios, which complements the traditional classroom learning to better prepare students for future real-world R&D
Curricula development based on the competition
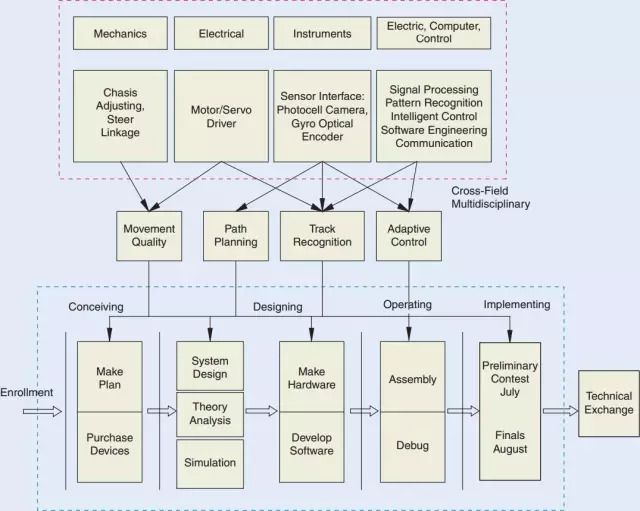
An important goal of the IMCC is to integrate the learning of multidisciplinary knowledge and the training of comprehensive abilities important to engineering professionals through the process of building and racing model cars. As mentioned earlier, the respective expertise involved include analog/digital electronics, embedded system, electronic design automation, control engineering, signal processing, pattern recognition, and more. Figure 16 illustrates the overall process for students to attend the competition, together with the respective disciplines supporting the different tasks in the competition.
After a decade of annual intelligent car competitions in China, a total of 176 practical training centers have been set up in 132 colleges across the country, and 115 courses have been developed or redesigned in Chinese universities. More than 36 textbooks have been published with different focuses and scopes, providing guidance on the core knowledge and skills to students who are interested in participating in the race car competition, or simply for a fun handson extracurricular practice. In addition, a large number of technical reports on the successful approaches in the previous competitions have been archived, from which new students can gain insights on the essential functional blocks and the associated circuitries.
Furthermore, an excellent group of faculty members and instructors nationwide have served as mentors to guide student teams. They provide guidance and technical resources to students, while leaving students room to think independently, make design decisions, and implement the designs. When students encounter problems in hardware or software design and testing, mentors can guide them to troubleshoot the problems. They can also advise students to evaluate the possible outcomes of a design decision. With help from these mentors, students can learn how to balance analysis and experimentation, which helps enhance their theoretical understanding and practical execution capabilities. Also, mentors usually discuss and summarize with their students the experiences and lessons learned after each competition.
Closing remarks
The IMCC in China has received many awards and recognitions in recent years. By providing college students and programs with an engaging way to learn/teach, this annual competition has built a strong reputation and fostered interactions and collaborations with many organizations. The industrial sponsor, Freescale Semiconductor, which merged with NXP, has enthusiastically supported the competition since 2006. More than 150,000 students have attended the competition and flourished be - cause of it. An overwhelming amount of positive feedback from student participants has been received. The IMCC has provided students with an opportunity to learn multiple engineering disciplines, most notably electrical and computer engineering and mechanical engineering, and put them into a synergistic use. The IMCC helps students strengthen communication and teamwork skills and inspires them to pursue engineering careers and become future innovators.
The competition has successfully met the educational goals originally set by the administrators and sponsors. To ensure its continued success, we are working on addressing several newly emerging issues. For example, several competition categories that use optic sensors to detect the road have seen a nontrivial amount of requirements for the competition conditions for the model cars to work well, and this added an extra burden to the onsite event organization. Also, as the number of teams increases significantly, the cost of organizing the race also increases. To overcome these difficulties, the competition tasks and rules need to be revised periodically. Another new trend with the help of the Internet is the possibility to build some standard competition platforms, which allow students to download their software into their model car remotely, facilitating their participation of the primary competition.
The contents and formats of the IMCC should adapt with new technological advancement. The state-of-the-art technologies and the advanced educational concepts rejuvenate the competition, supporting engineering students to develop their interests and embark on their professional careers.
Acknowledgments
We would like to thank our colleagues on the IMCC committee, including Jingchun Wang, Kaisheng Huang, and Ming Zeng, for their collegial efforts during the organization of the competition and the suggestions in conceiving the competition setup and rules. This work was supported by the National Experimental Teaching Demonstration Center Program, National Special Fund for Improving Basic Education Conditions and NSFC the National Science Foundation of China (NSFC grant 91420203).