数据挖掘:模型选择——XGBoost与LightBGM
之前介绍了GBDT算法的一些知识,该算法的拟合能力很强,但由于是前向算法,所以运行起来会很慢,要等前面的结果出来后,才能拟合残差。陈天奇团队研究的XGBoost算法,可以解决这个问题,并且对GBDT有了很大的改进。
本文主要学习自B站up主:春暖花开Abela的视频,讲解的很透彻。(后面的知识有些听不懂了,直接截图的,大家可以去B站上的视频听这个老师讲课)
在有监督的学习任务里,一般有模型,参数,目标函数和学习方法。
- 模型:给定输入X后预测输出y的方法,比如回归,分类等。
- 参数:模型中的参数,比如线性回归y=ax+b中的权重a和偏置b
- 目标函数:即损失函数,包含正则项
- 学习方法:给定目标函数后求解模型的和参数的方法,比如梯度下降法,牛顿法等。
XGBoost相比GBDT的改进
第一,GBDT将目标函数泰勒展开到一阶,而xgboost将目标函数泰勒展开到了二阶。保留了更多有关目标函数的信息,对提升效果有帮助。
第二,GBDT是给新的基模型寻找新的拟合标签(前面加法模型的负梯度),而xgboost是给新的基模型寻找新的目标函数(目标函数关于新的基模型的二阶泰勒展开)。
第三,xgboost加入了和叶子权重的L2正则化项,因而有利于模型获得更低的方差。
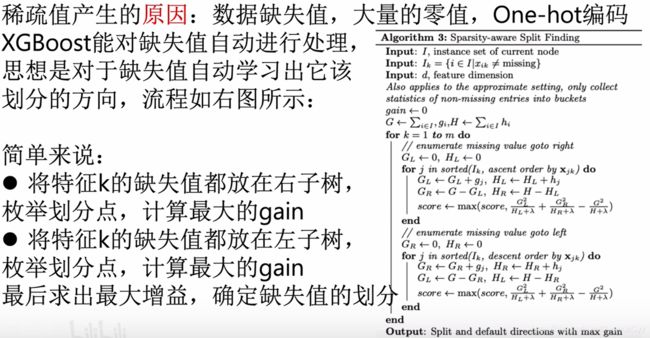
第四,xgboost增加了自动处理缺失值特征的策略。通过把带缺失值样本分别划分到左子树或者右子树,比较两种方案下目标函数的优劣,从而自动对有缺失值的样本进行划分,无需对缺失特征进行填充预处理。
此外,xgboost还支持候选分位点切割,特征并行等,可以提升性能。
回顾
xgboost是gbdt的进阶版,而gbdt是由一堆cart树通过boosting集成算法得到的。
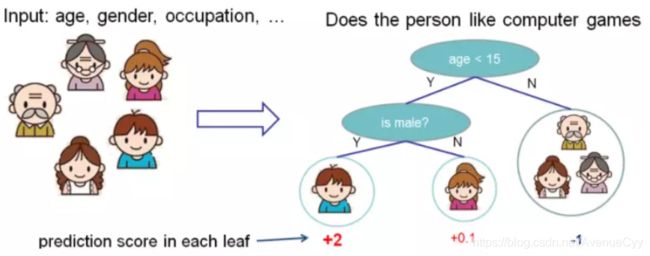
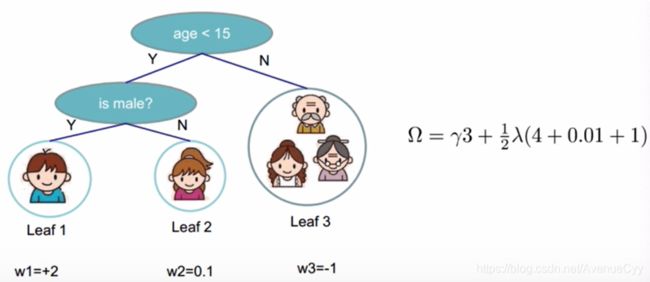
这里先看一下cart树的计算案例。回归树输出的是一个分数,表示这个人喜欢玩电脑游戏的程度,利用这个分数我们可以进行回归,或映射成概率进行分类。
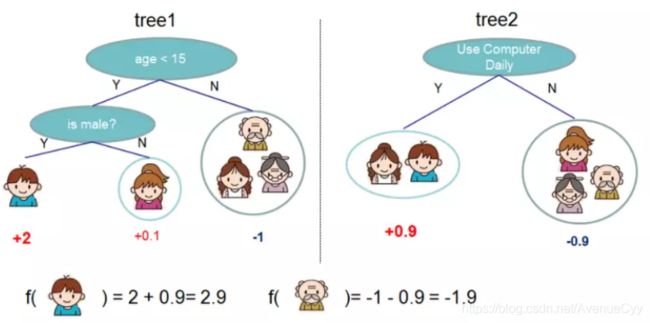
gbdt的计算案例。用两棵树进行预测,结果是两个树的和。
问题一:为什么xgboost用的是cart树,而不是别的呢?或者为什么是cart和boosting算法结合,而不是C4.5或者ID3?
在之前的树模型中有介绍,由于cart树是二叉树,计算结果会更快些。另外,对于分类问题,由于CART树的叶子节点对应的值是一个实际的分数,而非一个确定的类别,这将有利于实现高效的优化算法。
xgboost介绍
xgboost数学模型
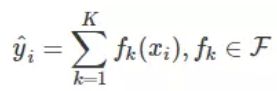
xgboost利用前向分布算法,学习到包含K棵树的加法模型。这里的K就是树的棵数,F表示所有可能的CART树,f表示一棵具体的CART树。这个模型由K棵CART树组成。
这里面最重要的就是得到所有决策树,知道树的结构和叶子结点。
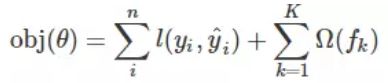
xgboost目标函数
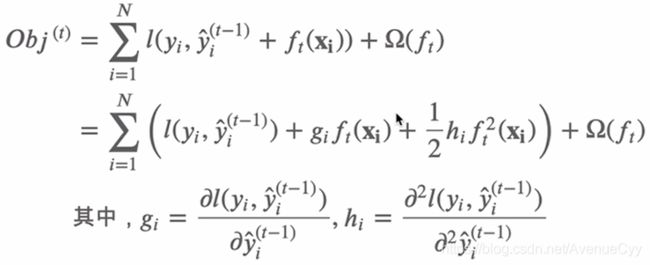
这个目标函数包含两部分,第一部分就是损失函数(预测值和真实值之间的差距),第二部分就是正则项(衡量决策树的复杂程度,复杂程度越高,正则化向就越大,对损失函数的惩罚也大一些。),这里的正则化项由K棵树的正则化项相加而来。
我们的目标是为了优化这个目标函数,但因为f是决策树(包含树的结构和叶子结点的个数),不是数值型的向量,因此不能用梯度下降的算法进行优化。
目标函数中损失函数的处理
xgboost是前向分布算法(通过一次次迭代,来获得当前的集成模型),通过贪心算法寻找局部最优解。第t次的结果,是第t-1次预测的结果,加上第t个弱分类器的结果。
要使损失函数最小,因为前t-1次的结果已经确定了,那么久需要找到第t棵树,使损失函数降低最多,以达到优化值。
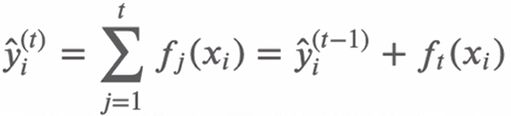
每次迭代都要寻找使损失函数降低最大的f(cart树),所以,目标函数可以写成如下形式。
经过前t-1轮的迭代,决策树的结构个叶节点都已经确定了,所以前t-1次的正则化项就是常数了。因为要计算参数,使目标函数值最小,与常数无关,因此可以去掉。

接下来,采用泰勒展开对目标参数进行近似。
这里y(t-1)相当于x ^(t),是我们已知的值。
f(x)相当于Δx。
为什么用泰勒公式进行展开?
泰勒公式:是一个用函数在某点的信息描述其附近取值的公式。比如,我们知道x点的y1值,想计算出x+Δx处的y2值,此时就可以利用泰勒公式进行求解。
对于一般的函数,泰勒公式的系数的选择依赖于函数在一点的各阶导数值。函数f(x)在x0处的基本形式如下:

这里x^(t+1) = x ^(t)+Δx,类比于上一步得到的损失函数,对第t棵树进行一个近似。一般展开到2阶,就可以对所求值进行一个很好的近似效果。
所以,我们要对损失函数进行泰勒展开,展开到2阶即可。

对目标函数来说,由于l(y,y(t-1))中没有参数,对t轮迭代来说是个常量,所以,可以移除。

目标函数中正则项的处理
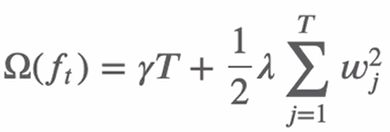
树的复杂度可以用树的深度,内部节点个数,叶节点个数等来衡量。
目标函数中用正则项来衡量树的复杂度:树的叶子结点个数T和每棵树的叶子结点输出分数W的平方和(相当于L2正则化)。
公式如下。其中γ和λ是人为设置的数。
举个例子。比如要衡量这棵树的复杂程度。
最终的目标函数
综上所述,xgboost的目标函数可以改写为如下形式。第一部分是对样本的累加(每个样本的计算值)。第二部分是正则项,是对叶节点的累加。
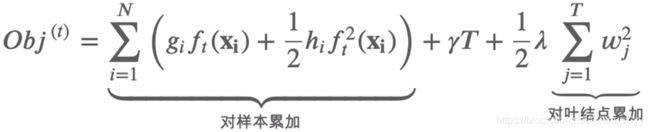
因为这两种累加形式不同,需要统一形式。这里转为都是对叶节点的累加。
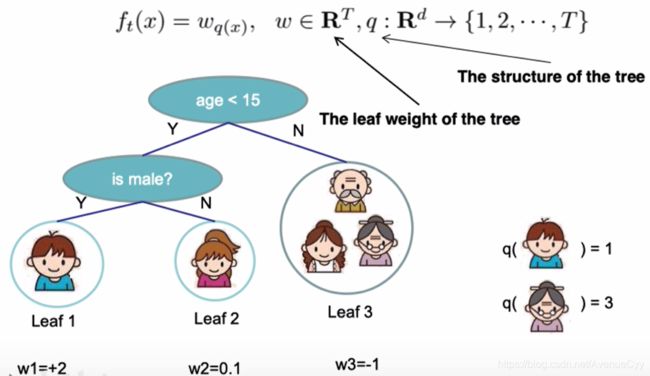
定义一个函数q(x),将输入x映射到某个叶子结点上。(对输入的每一个样本,求出该样本对应决策树的节点)
决策树f(x)就可以表示成wq(x)。
q(x)表示,对于样本x,输出其对应的叶子节点。q表示树的结构。
前面的w,计算该叶子节点的分数。w表示叶子结点的输出。
把样本的求和改为对叶子结点的求和。
I(j):叶子结点上包含哪些样本。
对于每一个叶节点来说,遍历一下属于该叶节点的样本,来求giwi。
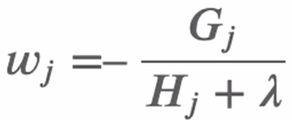
这里wj是我们要求解的,即每一个节点的输出是多少,是我们得到最终的结果。这里对w进行求导。

优化目标函数
接下来对目标函数进行优化,即计算第t轮时使得目标函数最小的叶节点的输出分数w,直接对w求导,使其导数为0.得到如下式子。
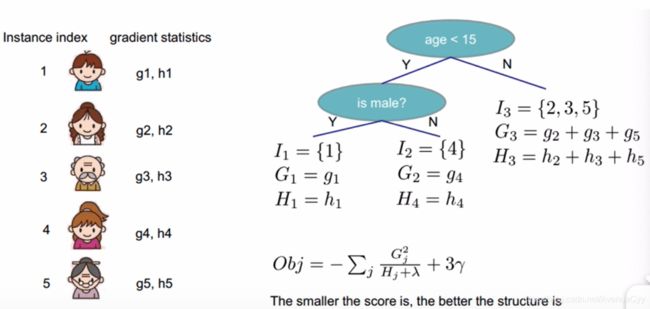
将其带入损失函数中。G^2/(H+λ)越大,目标函数越小。

目标函数计算案例
这是我们得到的第T棵树。这里的H4是H2.
学习方法
要确定模型,需要先确定决策树的结构。
决策树结构的生成,采用贪心算法,每次尝试分裂一个叶节点,计算分裂后的增益,选择增益最大的。在ID3中采用的是信息增益,C4.5中是信息增益比,CART中是Gini指数。
xgboost中计算增益的方法
损失函数如下。其中红色部分衡量了叶子结点对总体损失的贡献,红色部分越大,目标函数就越小。

在xgboost中增益计算方法如下。Gain的值越大,说明分裂后能使目标函数减小的越多。

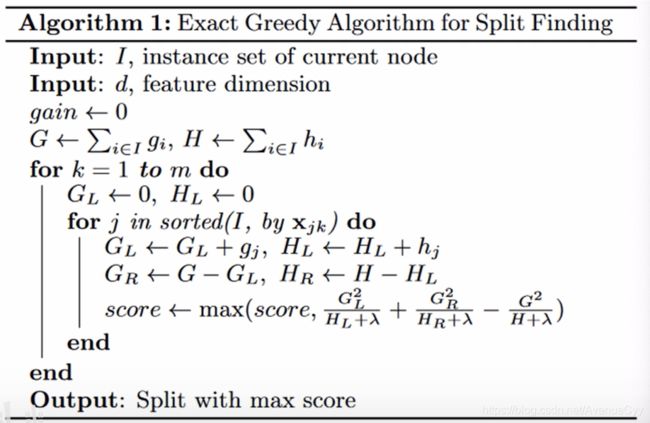
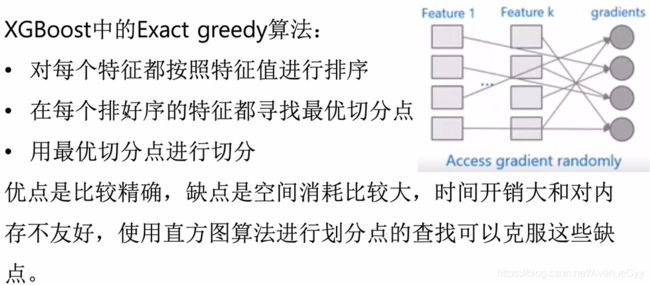
树结构的确定-精确贪心算法
枚举所有的特征和特征值,计算树的分裂方式。
I:当前节点的数据集。d:特征维度
增益Gain设为0。G:一阶导的和。H:二阶导的和。
遍历m棵树,
把左子树和右子树的一二阶梯度都设为0
对输入的特征排序,排序之后进行分裂,并对所有的分裂方式进行遍历:
计算左右子树的一二阶导
计算增益,选择增益最大的进行分裂
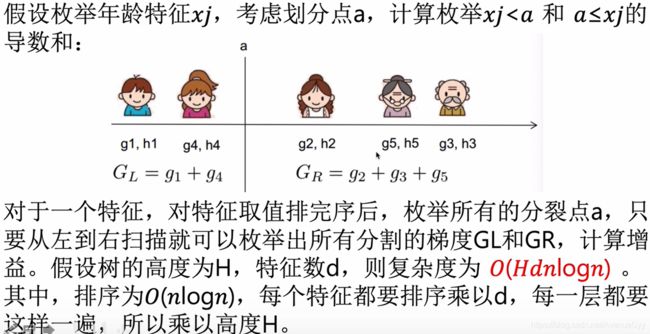
精确贪心算法弊端
首先进行排序,遍历每个特征,每一层都要做这种操作。计算的复杂度会很大。为了解决以上的问题,采用下面的近似算法。
树结构的确定-近似算法
近似算法有一个分桶的过程
遍历k棵树:
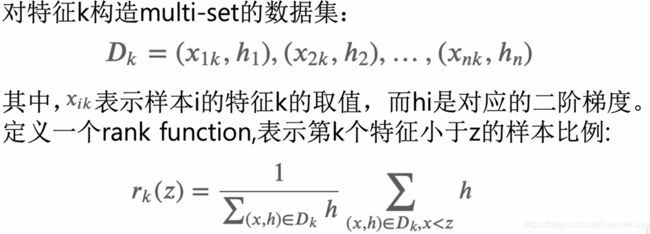
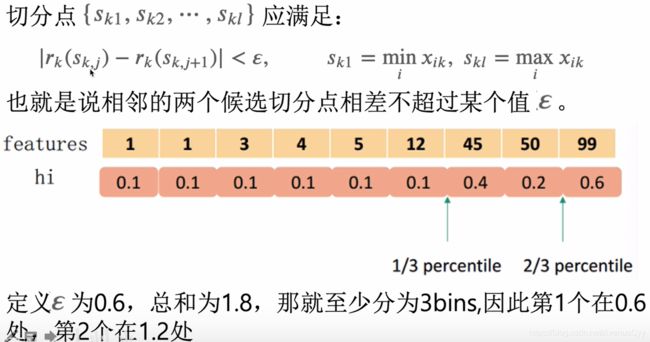
确定每个特征的候选切分点
计算每个划分点包含的一二阶梯度
接下来是对每个桶的数据进行一二阶导的求解。(感觉相当于数据分箱的操作1)
这样计算量会小一些,从N变量了L.
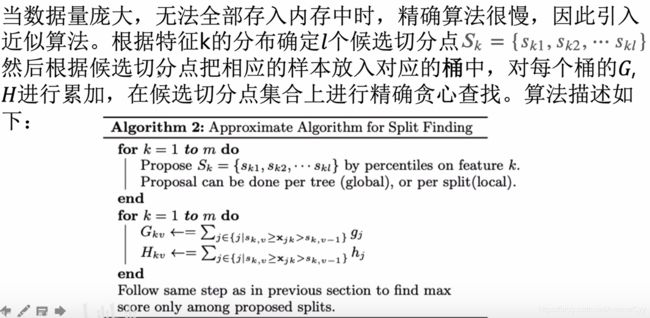
根据分位数给出对应的候选切分点。(但xgboost并没有这么做,这里只是提供这样的一种思路)
举个例子:
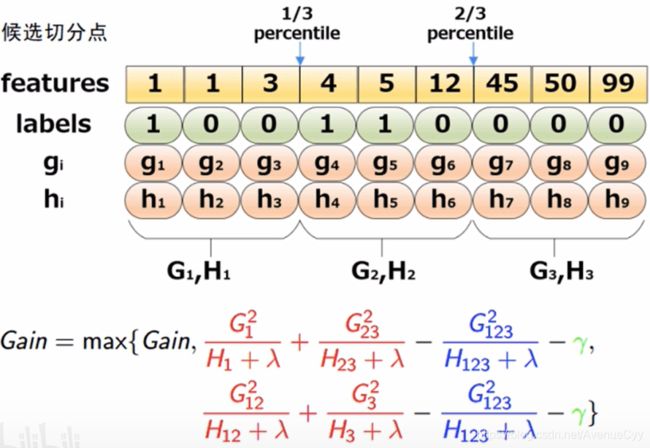
切分点的选取:全局策略(Global)和局部策略(Local)
Global:构建完一棵树后,不需要在某个叶节点划分的时候,再进行计算。
Local:每次分裂的时候,都需要重新划定切分点

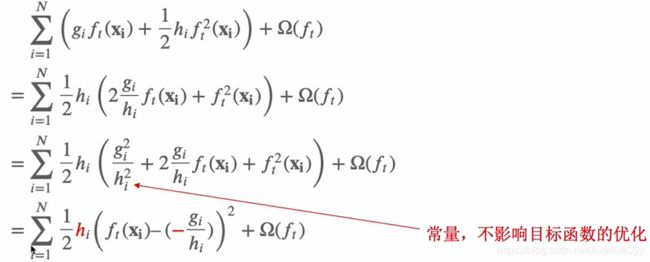
以二阶梯度h为权重的分位数算法,来选取切分点。
为什么使用二阶梯度分桶?
将目标函数的泰勒展开如下所示。目标函数是 真实值为-gi/h,权重为hi 的平方损失,因此,使用二阶梯度加权。
树结构的确定-稀疏值处理
树结构的确定-步长
xgboost中的步长,也叫做收缩率。有助于防止过拟合,步长通常取0.1。

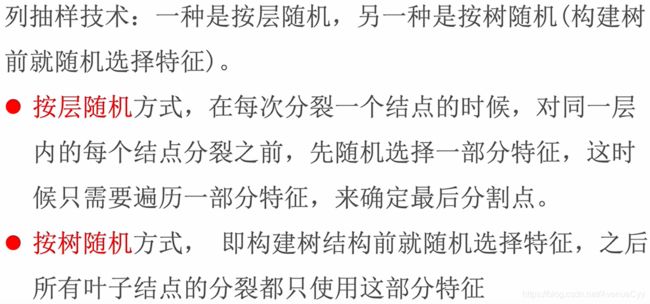
树结构的确定-列采样
列采样,即对特征的采样。
系统设计
以上数学推导已经完毕,剩下的是计算机的相关知识。
系统设计-分块并行
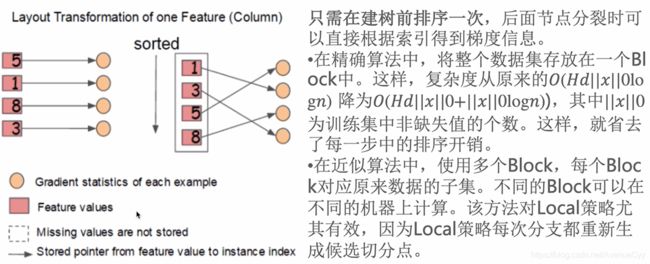
在建树的过程中,最耗时的是寻找最优切分点,而这个过程最耗时的是将数据排序。为了减少排序时间,提出Block结构存储数据。
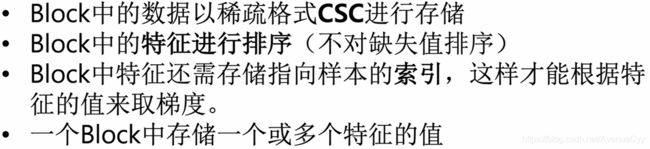
具体做法如下,这里不对缺失值进行排序。
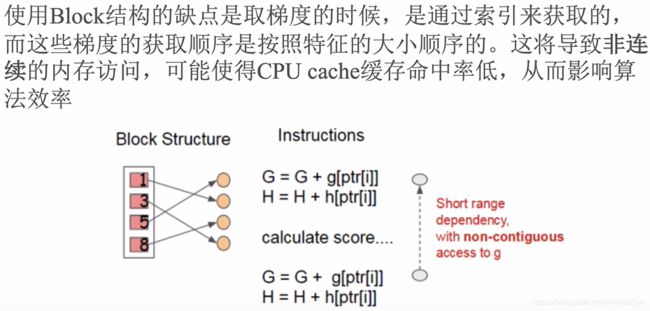
Block的缺点如下。其中梯度的顺序不是按照特征的大小顺序。
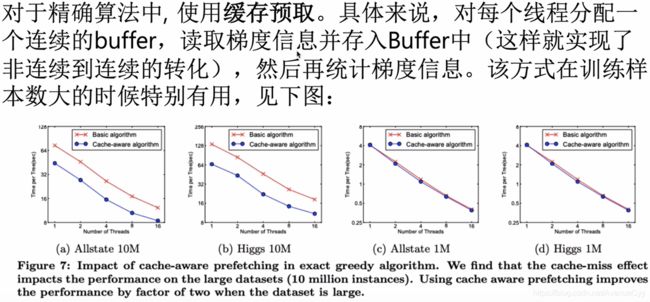
系统设计-缓存优化
精确算法的缓存优化:
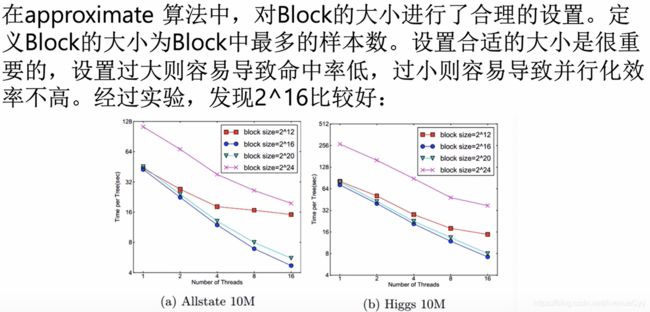
近似算法的缓存优化:
out of core Computation:
LightBGM介绍
LightBGM简介
由微软研究院开发,速度比XGBoost要快,精度也相当。它的设计理念为:
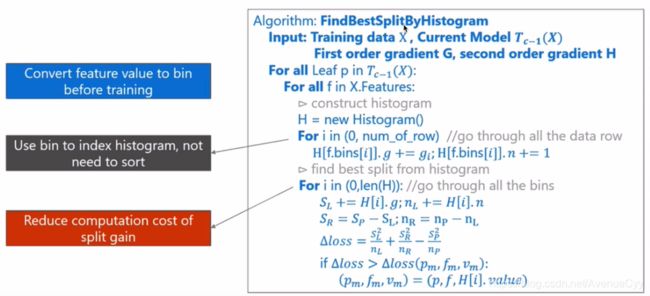
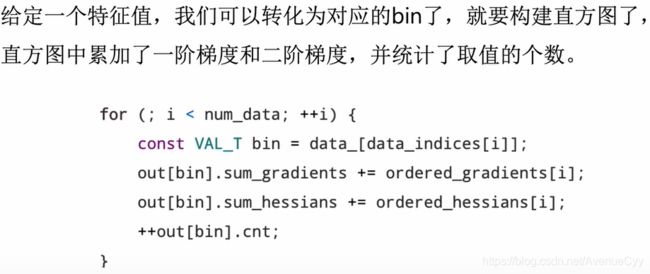
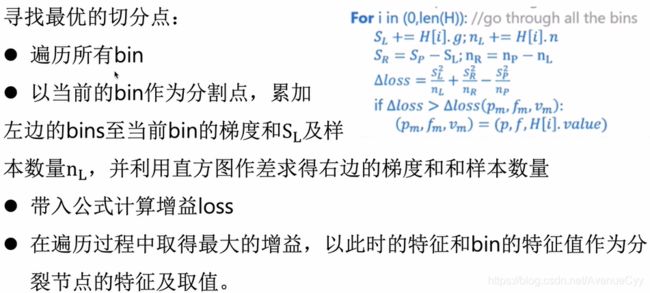
通过直方图找到最佳的分割点。
遍历T的所有叶节点:
遍历数据中的所有特征:
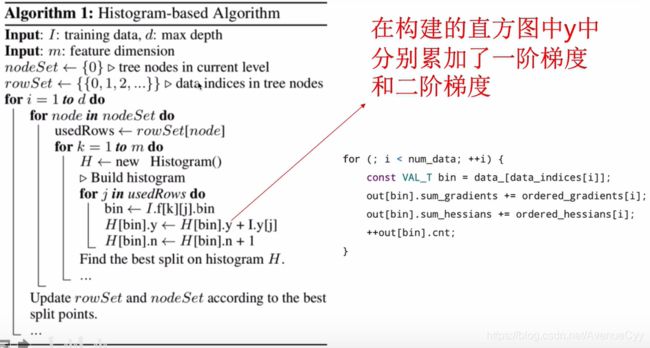
构建直方图
梯度信息
遍历所有的直方图里的每一个bins:
计算损失函数。
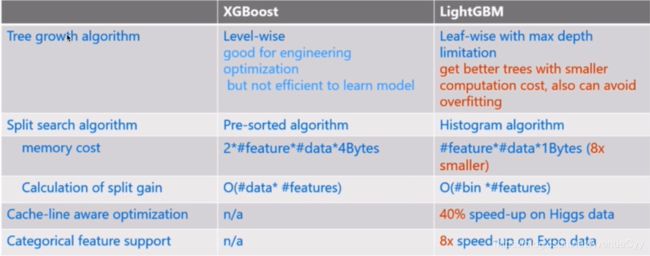
LightGBM与XGBoost对比:
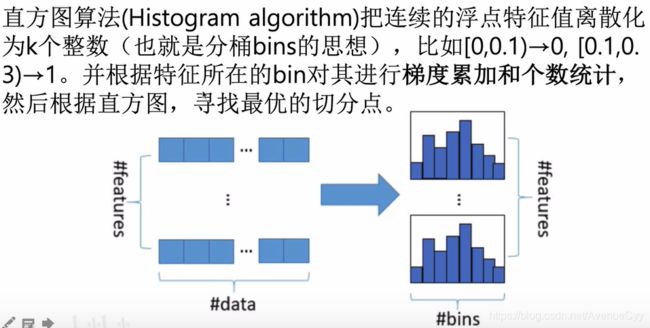
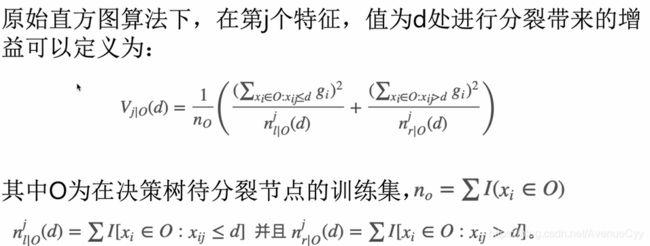
直方图算法
xgboost中精确贪心算法。
lightgbm中的直方图算法。
I:训练数据,d:最大深度,m:特征维度
直方图算法-如何分桶
数值型特征和分类特征采用不同的方法。
数值型特征:
分类型特征:

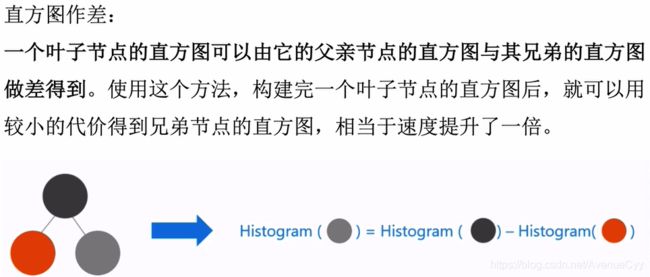
直方图算法-直方图构建
但是每个每个节点去计算直方图比较慢,这里采用直方图作差法。
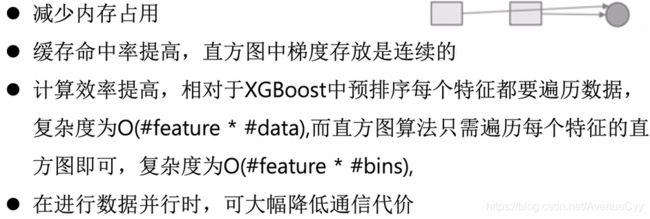
直方图算法优点
直方图算法改进
lightgbm中提出了降低特征维度的方法:GOSS算法和EFB算法。

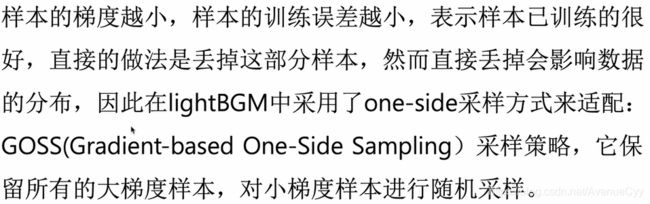
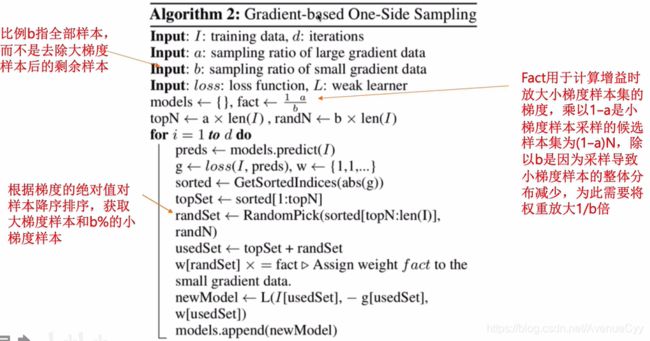
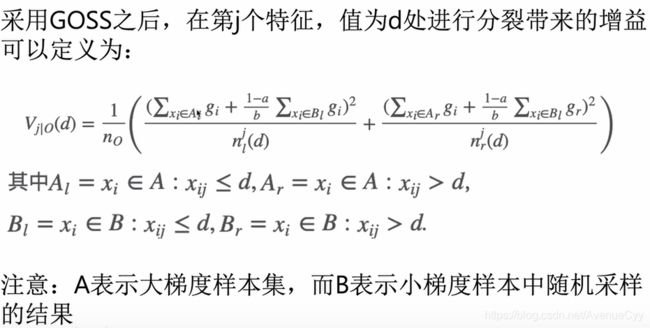
直方图算法改进-GOSS算法
根据梯度来对样本进行采样。主要倚重大梯度的样本,对小梯度的样本考虑小一些。
a:大梯度样本在所有样本中的比例
b:小梯度样本在所有样本中的比例
直方图算法改进-EFB算法
EFB算法主要针对高维特征中,为0的稀疏特征。对特征进行合并。先对互斥的特征进行合并(比如独热编码后的特征),对合并后的特征进行划分。
判断哪些特征可以合并:
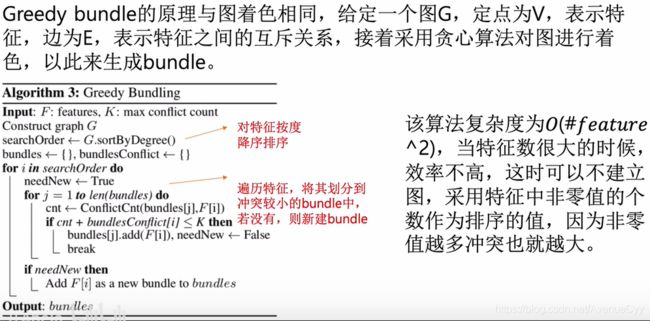
如何进行特征合并:

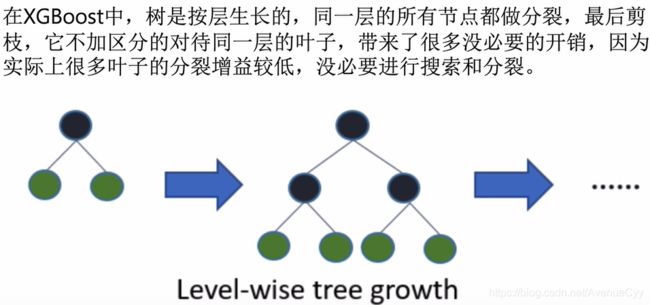
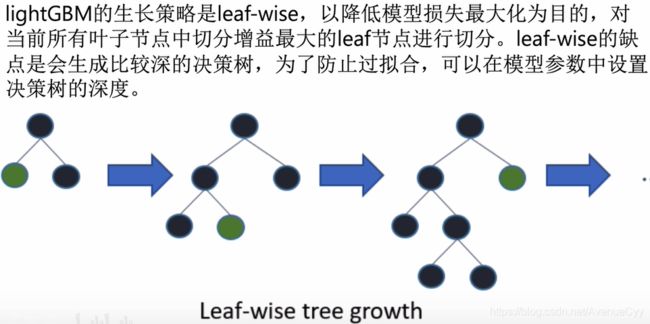
LightBGM树的生长策略
树的构建过程中,节点是如何分裂的。
LightBGM系统设计
lightbgm支持高效并行的特点目前支持:
LightBGM系统设计-特征并行

特征并行分为两类:传统算法和lightgbm算法。
传统算法:

lightgbm算法:

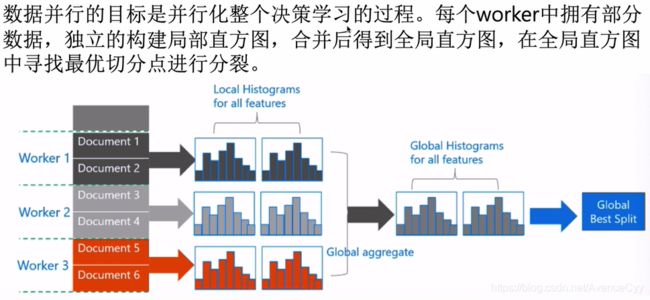
LightBGM系统设计-数据并行
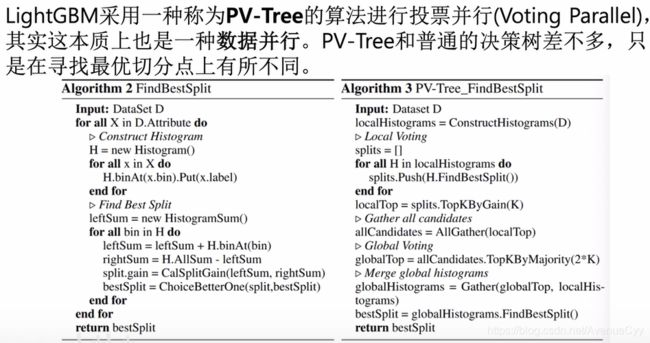
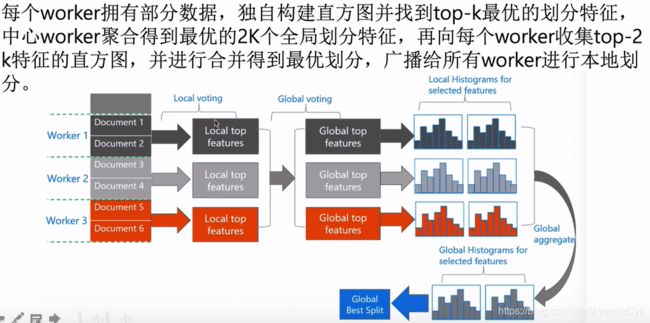
LightBGM系统设计-投票并行
LightGBM实践


参考文献
https://www.bilibili.com/video/BV1Ca4y1t7DS?p=11