目标检测之SSD(2015)
文章目录
- SSD(2015)
- 基本结构
- 结构特点
- 同时使用多个卷积层的输出做分类和回归
- anchor尺寸的选择
- loss的计算
- 处理流程
- 总体结构图
- 分类检测器结构图(RPN+分类)
- 默认框生成器
- 结果汇总
- 详细结构
- NMS
- 实际效果
- PASCAL VOC2007 test检测结果
- 性能分析
- 模型分析
- PASCAL VOC2012
- COCO
- 优缺点
- 优点
- 缺点
- 参考资料
SSD(2015)
文档存放更新地址:https://github.com/lartpang/ML_markdown
文章书写匆忙,有些使用了网上其他朋友的文字以及图片,但是没有及时复制对应的链接,在此深表歉意,以及深深的感谢。
如有朋友看到了对应的出处,或者作者发现,可以留言,小弟马上修改,添加引用。
论文链接:https://arxiv.org/pdf/1512.02325.pdf
tensorflow源码链接:https://github.com/balancap/SSD-Tensorflow
论文翻译: http://noahsnail.com/2017/12/11/2017-12-11-Single Shot MultiBox Detector论文翻译——中英文对照/
SSD是YOLO之后又一个引人注目的目标检测结构,它沿用了YOLO中直接回归 bbox和分类概率的方法,同时又参考了Faster R-CNN,大量使用anchor来提升识别准确度。通过把这两种结构相结合,SSD保持了很高的识别速度,还能把mAP提升到较高的水平。
文章贡献:
- 我们引入了SSD,这是一种针对多个类别的单次检测器,比先前的先进的单次检测器(YOLO)更快,并且准确得多,事实上,与执行显式区域提出和池化的更慢的技术具有相同的精度(包括Faster R-CNN)。
- SSD的核心是预测固定的一系列默认边界框的类别分数和边界框偏移,使用更小的卷积滤波器应用到特征映射上。
- 为了实现高检测精度,我们根据不同尺度的特征映射生成不同尺度的预测,并通过纵横比明确分开预测。
- 这些设计功能使得即使在低分辨率输入图像上也能实现简单的端到端训练和高精度,从而进一步提高速度与精度之间的权衡。
- 实验包括在PASCAL VOC,COCO和ILSVRC上评估具有不同输入大小的模型的时间和精度分析,并与最近的一系列最新方法进行比较。
基本结构
原作者给了两种SSD结构,SSD 300和SSD 512,用于不同输入尺寸的图像识别。
本文中以SSD 300为例.
下图上半部分就是SSD 300,下半部分是YOLO,可以对比来看。
-
SSD 300中输入图像的大小是300x300.
-
特征提取部分使用了VGG16的卷积层,并将VGG16的
fc6和fc7转换为卷积层(图中conv6和conv7) -
将pool5从 2 × 2 − s 2 2\times 2-s2 2×2−s2更改为 3 × 3 − s 1 3\times 3-s1 3×3−s1,并使用空洞算法[18]来填补这个“小洞”
-
我们删除所有的dropout层和
fc8层 -
之后又接了多个卷积(conv8_2,conv9_2,conv10_2)
-
最后用一个Global Average Pool来变成1x1的输出(conv11_2)
下面是对于keras版本的实现:
input_layer = Input(shape=input_shape)
# Block 1
conv1_1 = Conv2D(64, (3, 3),
name='conv1_1',
padding='same',
activation='relu')(input_layer)
conv1_2 = Conv2D(64, (3, 3),
name='conv1_2',
padding='same',
activation='relu')(conv1_1)
pool1 = MaxPooling2D(name='pool1',
pool_size=(2, 2),
strides=(2, 2),
padding='same', )(conv1_2)
# Block 2
conv2_1 = Conv2D(128, (3, 3),
name='conv2_1',
padding='same',
activation='relu')(pool1)
conv2_2 = Conv2D(128, (3, 3),
name='conv2_2',
padding='same',
activation='relu')(conv2_1)
pool2 = MaxPooling2D(name='pool2',
pool_size=(2, 2),
strides=(2, 2),
padding='same')(conv2_2)
# Block 3
conv3_1 = Conv2D(256, (3, 3),
name='conv3_1',
padding='same',
activation='relu')(pool2)
conv3_2 = Conv2D(256, (3, 3),
name='conv3_2',
padding='same',
activation='relu')(conv3_1)
conv3_3 = Conv2D(256, (3, 3),
name='conv3_3',
padding='same',
activation='relu')(conv3_2)
pool3 = MaxPooling2D(name='pool3',
pool_size=(2, 2),
strides=(2, 2),
padding='same')(conv3_3)
# Block 4
conv4_1 = Conv2D(512, (3, 3),
name='conv4_1',
padding='same',
activation='relu')(pool3)
conv4_2 = Conv2D(512, (3, 3),
name='conv4_2',
padding='same',
activation='relu')(conv4_1)
conv4_3 = Conv2D(512, (3, 3),
name='conv4_3',
padding='same',
activation='relu')(conv4_2)
pool4 = MaxPooling2D(name='pool4',
pool_size=(2, 2),
strides=(2, 2),
padding='same')(conv4_3)
# Block 5
conv5_1 = Conv2D(512, (3, 3),
name='conv5_1',
padding='same',
activation='relu')(pool4)
conv5_2 = Conv2D(512, (3, 3),
name='conv5_2',
padding='same',
activation='relu')(conv5_1)
conv5_3 = Conv2D(512, (3, 3),
name='conv5_3',
padding='same',
activation='relu')(conv5_2)
pool5 = MaxPooling2D(name='pool5',
pool_size=(3, 3),
strides=(1, 1),
padding='same')(conv5_3)
# FC6
fc6 = Conv2D(1024, (3, 3),
name='fc6',
dilation_rate=(6, 6),
padding='same',
activation='relu'
)(pool5)
# x = Dropout(0.5, name='drop6')(x)
# FC7
fc7 = Conv2D(1024, (1, 1),
name='fc7',
padding='same',
activation='relu'
)(fc6)
# x = Dropout(0.5, name='drop7')(x)
# Block 6
conv6_1 = Conv2D(256, (1, 1),
name='conv6_1',
padding='same',
activation='relu')(fc7)
conv6_2 = Conv2D(512, (3, 3),
name='conv6_2',
strides=(2, 2),
padding='same',
activation='relu')(conv6_1)
# Block 7
conv7_1 = Conv2D(128, (1, 1),
name='conv7_1',
padding='same',
activation='relu')(conv6_2)
conv7_1z = ZeroPadding2D(name='conv7_1z')(conv7_1)
conv7_2 = Conv2D(256, (3, 3),
name='conv7_2',
padding='valid',
strides=(2, 2),
activation='relu')(conv7_1z)
# Block 8
conv8_1 = Conv2D(128, (1, 1),
name='conv8_1',
padding='same',
activation='relu')(conv7_2)
conv8_2 = Conv2D(256, (3, 3),
name='conv8_2',
padding='same',
strides=(2, 2),
activation='relu')(conv8_1)
# Last Pool
pool6 = GlobalAveragePooling2D(name='pool6')(conv8_2)
结构特点
SSD方法基于前馈卷积网络,该网络产生固定大小的边界框集合,并对这些边界框中存在的目标类别实例进行评分,然后进行非极大值抑制步骤来产生最终的检测结果。
早期的网络层基于用于高质量图像分类的标准架构(在任何分类层之前被截断),我们将其称为基础网络。然后,我们将辅助结构添加到网络中.
同时使用多个卷积层的输出做分类和回归
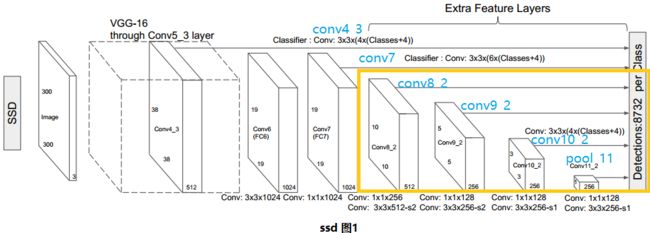
SSD使用VGG-16-Atrous作为基础网络,其中黄色部分为在VGG-16基础网络上填加的特征提取层。
SSD与yolo不同之处是除了在最终特征图上做目标检测之外,还在之前选取的5个特特征图上进行预测。
可以看出,检测过程不仅在附加网络部分的特征图(conv8_2, conv9_2, conv_10_2, pool_11)上进行,为了保证网络对小目标有很好检测效果,检测过程也在基础网络部分的特征图(conv4_3, conv_7)上进行。
SSD这么做有什么好处呢?
训练SSD和训练使用区域提出的典型检测器之间的关键区别在于,需要将真实信息分配给固定的检测器输出集合中的特定输出。
一旦确定了这个分配,损失函数和反向传播就可以应用端到端了。训练也涉及选择默认边界框集合和缩放进行检测,以及难例挖掘和数据增强策略。
要回答这个问题得先回顾下YOLO的结构,YOLO在训练时ground truth和bbox是一一对应的关系(ground truth对应到其中心位置所在区域中IOU最大的那个bbox来计算loss),如果有两个ground truth的尺寸和位置都比较相近,就很有可能对应到同一个区域的同一个bbox,这种场景下必然会有一个目标无法识别。
为了解决这个问题SSD的作者把YOLO的结构做了如下优化:
-
重新启用了Faster R-CNN中anchor的结构
在SSD中如果有多个ground truth,每个anchor(原文中称作default box,取名不同而已)会选择对应到IOU最大的那个ground truth(以anchors为起始考虑)。
一个anchor只会对应一个ground truth,但一个ground truth都可以对应到大量anchor,这样无论两个ground truth靠的有多近,都不会出现YOLO中bbox冲突的情况。
-
同时使用多个层级上的anchor来进行回归
作者认为仅仅靠同一层上的多个anchor来回归,还远远不够。因为有很大可能这层上所有anchor的IOU都比较小,就是说所有anchor离ground truth都比较远,用这种anchor来训练误差会很大。
例如下图中,左边较低的层级因为feature map尺寸比较大,anchor覆盖的范围就比较小,远小于ground truth的尺寸,所以这层上所有anchor对应的IOU都比较小;右边较高的层级因为feature map尺寸比较小,anchor覆盖的范围就比较大,远超过ground truth的尺寸,所以IOU也同样比较小;只有中间的anchor才有较大的IOU。
通过同时对多个层级上的anchor计算IOU,就能找到与ground truth的尺寸、位置最接近(即IOU最大)的一批anchor,在训练时也就能达到最好的准确度。
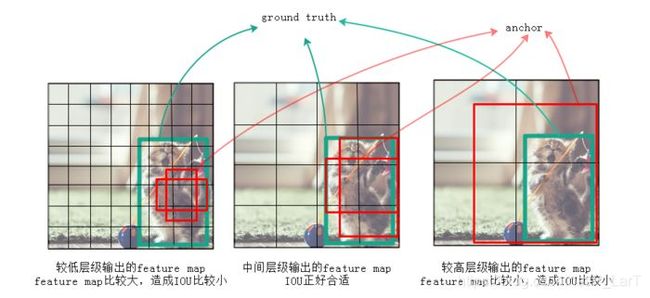 )
)不同层级输出的feature map上anchor的IOU差异会比较大
anchor尺寸的选择
下面来看下SSD选择anchor的方法。在SSD框架内,default boxes/anchors不需要对应于每层的实际感受野。

这是特征图上的框, 具体对应于原始图像, 还需要将和这个min_size*(input_scale / feature_map_scale)?
-
我们将每个默认边界框的中心设置为 ( i + 0.5 ∣ f k ∣ , j + 0.5 ∣ f k ∣ ) (\frac{i+0.5}{|f_k|}, \frac{j+0.5}{|f_k|}) (∣fk∣i+0.5,∣fk∣j+0.5),其中 ∣ f k ∣ |f_k| ∣fk∣是第k个方形特征映射的大小(特征图的边长), i , j ∈ [ 0 , ∣ f k ∣ ) i, j\in [0, |f_k|) i,j∈[0,∣fk∣)
-
我们为默认边界框添加不同的长宽比,并将它们表示为 a r ∈ 1 , 2 , 3 , 1 2 , 1 3 a_r \in {1, 2, 3, \frac{1}{2}, \frac{1}{3}} ar∈1,2,3,21,31。我们可以计算每个边界框的宽度 w i d t h = ( w k a = s k a r ) width=(w_k^a = s_k\sqrt{a_r}) width=(wka=skar)和高度 h e i g h t = ( h k a = s k / a r ) height=(h_k^a = s_k / \sqrt{a_r}) height=(hka=sk/ar)。
同时还有多个长方形的anchor,长方形anchor的数目在不同层级会有差异.
对于长宽比为1,我们还添加了一个默认边界框,其尺度为 s ’ k = s k s k + 1 s’_k = \sqrt{s_k s_{k+1}} s’k=sksk+1
在每个特征映射位置得到6个默认边界框
-
上面的min_size和max_size由下面公式计算得到, s m i n = 0.2 , s m a x = 0.9 s_{min}=0.2, s_{max}=0.9 smin=0.2,smax=0.9.
m代表全部用于回归的层数,比如在SSD 300中m就是6
第k层的 m i n s i z e = s k min_{size}=s_k minsize=sk,第k层的 m a x s i z e = s k + 1 max_{size}=s_{k+1} maxsize=sk+1
luminoth的代码实现, 与这里提到的公式有些不同:
import numpy as np import tensorflow as tf def generate_anchors_reference(ratios, scales, num_anchors, feature_map_shape): """ Generate the default anchor for one feat map which we will later convolve to generate all the anchors of that feat map. 生成一个特征图的左上角的一个格子里的默认锚点,我们稍后将进行卷积以生成该特征图的所有锚点 anchor_reference = generate_anchors_reference( anchor_ratios, scales[i: i + 2], anchors_per_point[i], feat_map_shape ) """ heights = np.zeros(num_anchors) widths = np.zeros(num_anchors) # 先得到那个大的方形的anchor if len(scales) > 1: # 说明不是最后的特征图, 计算的时候, 先确定那个大框, 即 feature_map_weight* # sqrt(min_size, max_size)(特征图也是方形的) widths[0] = heights[0] = (np.sqrt(scales[0] * scales[1]) * feature_map_shape[0]) # The last endpoint else: # The last layer doesn't have a subsequent layer with which # to generate the second scale from their geometric mean, # so we hard code it to 0.99. # We should add this parameter to the config eventually. # 最后一层没有后续层来得到需要的max_size, 所以这里直接编码为0.99 heights[0] = scales[0] * feature_map_shape[0] * 0.99 widths[0] = scales[0] * feature_map_shape[1] * 0.99 # 这里的纵横比例实际上的数量是不包含前面这个大的方形anchor的, 但是num_anchors却包含了, # 所以这里对于ratios进行切片的时候, 要截止到num_anchors-1, 因为大方形anchor是一定有的 # 而且小的纵横比也是一定有的 ratios = ratios[:num_anchors - 1] heights[1:] = scales[0] / np.sqrt(ratios) * feature_map_shape[0] widths[1:] = scales[0] * np.sqrt(ratios) * feature_map_shape[1] # Each feature layer forms a grid on image space, so we # calculate the center point on the first cell of this grid. # Which we'll use as the center for our anchor reference. # The center will be the midpoint of the top left cell, # given that each cell is of 1x1 size, its center will be 0.5x0.5 x_center = y_center = 0.5 # Create anchor reference. # 这里的到anchors的(num_of_the_feature_map_anchors, 4) # [x_min, y_min, x_max, y_max] anchors = np.column_stack([ x_center - widths / 2, y_center - heights / 2, x_center + widths / 2, y_center + heights / 2, ]) return anchors def generate_raw_anchors(feature_maps, anchor_min_scale, anchor_max_scale, anchor_ratios, anchors_per_point): """ Returns a dictionary containing the anchors per feature map. 返回所有提取出来的特征图的所有的anchors Returns: anchors: A dictionary with feature maps as keys and an array of anchors as values ('[[x_min, y_min, x_max, y_max], ...]') with shape (anchors_per_point[i] * endpoints_outputs[i][0] * endpoints_outputs[i][1], 4) """ # TODO: Anchor generation needs heavy refactor # We interpolate the scales of the anchors from a min and a max scale # 线性插值, 从最小值到最大值, 这里保留了最大值, 总共的数量为len(feture_maps), 这里应该是6 scales = np.linspace(anchor_min_scale, anchor_max_scale, len(feature_maps)) anchors = {} # 对各个位置上的特征图进行遍历, 提取对应的特征图的大小(高,宽), 获取 for i, (feat_map_name, feat_map) in enumerate(feature_maps.items()): feat_map_shape = feat_map.shape.as_list()[1:3] # ques: 若是i是0~5, 那这里对应的sacles最后的范围岂不是超界了? # ans: 超出去的元素就不存在了, 这是python切片的一个小技巧, 若是索引元素, 那就不可以了 anchor_reference = generate_anchors_reference( anchor_ratios, scales[i: i + 2], anchors_per_point[i], feat_map_shape ) # 生成每个特征图对应的所有anchors anchors[feat_map_name] = generate_anchors_per_feat_map( feat_map_shape, anchor_reference) return anchors def generate_anchors_per_feat_map(feature_map_shape, anchor_reference): """ Generate anchor for an image. 已获得的基于左上角的feature_map的grid的anchors, 进一步获得整个特征图上的所有的anchors Using the feature map, the output of the pretrained network for an image, and the anchor_reference generated using the anchor config values. We generate a list of anchors. Anchors are just fixed bounding boxes of different ratios and sizes that are uniformly generated throught the image. Args: feature_map_shape: Shape of the convolutional feature map used as input for the RPN. Should be (batch, height, width, depth). Returns: all_anchors: A flattened Tensor with all the anchors of shape `(num_anchors_per_points * feature_width * feature_height, 4)` using the (x1, y1, x2, y2) convention. """ with tf.variable_scope('generate_anchors'): # 这五句指令, 实现了长宽范围内的数据的组合对应 shift_x = np.arange(feature_map_shape[1]) shift_y = np.arange(feature_map_shape[0]) shift_x, shift_y = np.meshgrid(shift_x, shift_y) shift_x = np.reshape(shift_x, [-1]) shift_y = np.reshape(shift_y, [-1]) # 对数据进行一下打包, 得到的是(4, HxW) shifts = np.stack( [shift_x, shift_y, shift_x, shift_y], axis=0 ) shifts = np.transpose(shifts) # Shifts now is a (H x W, 4) Tensor # 现在相当于得到了所有的grid的左上角的坐标 # Expand dims to use broadcasting sum. # (1, num_grid_anchors, 4) + (HxW, 1, 4) = (HxW, num_grid_anchors, 4) all_anchors = ( np.expand_dims(anchor_reference, axis=0) + np.expand_dims(shifts, axis=1) ) # Flatten # (HxWxnum_grid_anchors, 4) return np.reshape(all_anchors, (-1, 4))
loss的计算
SSD包含三部分的loss:前景分类的loss、背景分类的loss、位置回归的loss。
总体目标损失函数是定位损失(loc)和置信度损失(conf)的加权和
- N是匹配的默认边界框的数量, 如果N=0,则将损失设为0
- α是分类loss和回归loss的调节比例,论文中α=1
对于每个特征图的一点, 预测C个类别得分,以及相对于Default Bounding Box的4个偏移值

-
L l o c ( x , l , g ) L_{loc}(x,l,g) Lloc(x,l,g)是所有用于前景分类的anchor的位置坐标的回归loss, L l o c ( x , l , g ) L_{loc}(x,l,g) Lloc(x,l,g)位置回归仍采用Smooth L1方法, 类似于faster-rcnn, 回归默认边界框(d)的中心(cx, cy)和其宽度(w),高度(h)的偏移量
# Second we need to calculate the smooth l1 loss between # `bbox_offsets` and `bbox_offsets_targets`. # 一个是预测的偏移缩放值, 一个是真实框的偏移缩放值 bbox_offsets = prediction_dict['loc_pred'] bbox_offsets_targets = (prediction_dict['target']['bbox_offsets']) # We only want the non-background labels bounding boxes. # 在预测框和真实框中筛选前景对应的偏移缩放值, not_ignored = tf.reshape(tf.greater(cls_target, 0), [-1]) bbox_offsets_positives = tf.boolean_mask( bbox_offsets, not_ignored, name='bbox_offsets_positives') bbox_offsets_target_positives = tf.boolean_mask( bbox_offsets_targets, not_ignored, name='bbox_offsets_target_positives' ) # 得到对于每个提案的回归损失 reg_loss_per_proposal = smooth_l1_loss( bbox_offsets_positives, bbox_offsets_target_positives) -
L c o n f ( x , c ) L_{conf}(x,c) Lconf(x,c)是前景§的分类loss和背景(0)的分类loss的和, 是在多类别置信度©上的softmax损失
在源码中对anchors对于所有真实框的最大的IoU进行判断, 当IOU>0.5的anchor都用于前景分类(当然, 如同Faster RCNN中那样, 也要考虑和每一个真实框对应的最好的anchors),在IOU<0.5的anchor中选择部分用作背景分类。
最终被认定为背景的anchors, 是和所有真实框的最大IoU值小于背景阈值(0.2), 而且又是标签被标定为小于等于0的anchors, 选择其中的有着较大的最大分类概率的作为最后的背景
只选择部分的原因是背景anchor的数目一般远远大于前景anchor,如果都选为背景,就会弱化前景loss的值,造成定位不准确。
在论文中"难例挖掘"一节提到, 背景分类的anchor数目至多为前景分类anchor数的三倍, 来保持它们的平衡, 而且也发现这会导致更快的优化和更稳定的训练。
这里可以看下面的代码:
import sonnet as snt import tensorflow as tf from luminoth.utils.bbox_overlap import bbox_overlap_tf from luminoth.utils.bbox_transform_tf import encode class SSDTarget(snt.AbstractModule): """ Generate SSD target tensors for both probabilities and bounding boxes. 对于概率和边界框, 生成SSD目标张量, 返回对应anchors的类别标签(0~21)和真实框相对于前景 anchors自身坐标的偏移量和缩放量 There are two types of targets, anchor_label and bounding box targets. targets有两种类型, 一种是anchor的标签, 一种是边界框targets Anchor labels are just the label which best fits each anchor, and therefore are the target for that anchor, they are used both for background and foreground labels. anchor的label表示最匹配anchor的标签, 通常使用背景和前景标签 Bounding box targets are just the encoded coordinates that anchors labeled as foreground should target. 边界框标签编码被标记为前景的anchors的坐标 """ def __init__(self, num_classes, config, variances, seed=None, name='ssd_target'): """ 构造类的实例的时候调用 Args: num_classes: Number of possible classes. config: Configuration object for RCNNTarget. """ super(SSDTarget, self).__init__(name=name) self._num_classes = num_classes self._hard_negative_ratio = config.hard_negative_ratio self._foreground_threshold = config.foreground_threshold self._background_threshold_high = config.background_threshold_high self._variances = variances self._seed = seed def _build(self, probs, all_anchors, gt_boxes): """ 在向类的实例传值的时候调用 Args: probs: 这里包含了背景的类别, 所以是 num_classes+1 all_anchors: A Tensor with anchors for all of SSD's features. The shape of the Tensor is (num_anchors, 4). 所有的anchors的原图上的坐标结果 gt_boxes: A Tensor with the ground truth boxes for the image. The shape of the Tensor is (num_gt, 5), having the truth label as the last value for each box. Returns: class_targets: Either a truth value of the anchor (a value between 0 and num_classes, with 0 being background), or -1 when the anchor is to be ignored in the minibatch. The shape of the Tensor is (num_anchors, 1). 返回各个anchor对应的类别标签 bbox_offsets_targets: A bounding box regression target for each of the anchors that have a greater than zero label. For every other anchors we return zeros. The shape of the Tensor is (num_anchors, 4). 返回各个前景anchor对应的坐标偏移量, 其余的返回0 在all_anchors中前景anchors的位置上更新对应的真实框相对于自身坐标的偏移 量和缩放量 """ all_anchors = tf.cast(all_anchors, tf.float32) gt_boxes = tf.cast(gt_boxes, tf.float32) # We are going to label each anchor based on the IoU with # `gt_boxes`. Start by filling the labels with -1, marking them as # unknown. # (num_anchors, 1) anchors_label_shape = tf.gather(tf.shape(all_anchors), [0]) # [-1] ############################################################### # -1 * (num_anchors, 1) anchors_label = tf.fill( dims=anchors_label_shape, value=-1. ) # (num_anchors, num_gt) overlaps = bbox_overlap_tf(all_anchors, gt_boxes[:, :4]) # (num_anchors, ) # 对于每个eanchor和所有真实框的IoU的 最大IoU值 max_overlaps = tf.reduce_max(overlaps, axis=1) ####################################################################### # 这里开始从anchors的角度来思考, 考虑和它最好的真实框所对应的IoU, 超过阈值, # anchors就作为正样本 ####################################################################### # Get the index of the best gt_box for each anchor. # 对于每个anchor最为接近的真实框 # (num_anchors, ), 每个元素表示真实框的 对应序号 best_gtbox_for_anchors_idx = tf.argmax(overlaps, axis=1) # Having the index of the gt bbox with the best label we need to get # the label for each gt box and sum 1 to it because 0 is used for # background. # 在对于每个anchor最为接近的真实框的类别标签(0~20)上加1, 作为这些anchors的标签 # (num_anchors, 4) best_fg_labels_for_anchors = tf.add( tf.gather(gt_boxes[:, 4], best_gtbox_for_anchors_idx), 1. ) # (num_anchors, ) 依据每个anchors对应的最大的IoU值, 确定前景anchors为true iou_is_fg = tf.greater_equal( max_overlaps, self._foreground_threshold ) # [-1] =====> [-1, 1~20(前景anchor)] ################################## # We update anchors_label with the value in # best_fg_labels_for_anchors only when the box is foreground. # TODO: Replace with a sparse_to_dense with -1 default_value # 从前景anchor中将确定的最好的真实框的标签设定为anchors的标签, 其余保持-1不变 anchors_label = tf.where( condition=iou_is_fg, x=best_fg_labels_for_anchors, y=anchors_label ) ####################################################################### # 这里开始从真实框的角度来思考, 防止有真实框没有对应的anchors, 所以要考虑和真实框对 # 应的最好的anchors作为正样本 ####################################################################### # (num_gt, ) 对于每个真实框而言, 最好的anchor的位置 best_anchor_idxs = tf.argmax(overlaps, axis=0) # 使用得到的anchors的位置, 生成一个稀疏张量, 大小为(num_anchors, ), # 有真实框对应的anchors位置上为True, 这是最起码的正样本 # 这里为后面的tf.where实际上创造了一个条件张量 is_best_box = tf.sparse_to_dense( sparse_indices=best_anchor_idxs, sparse_values=True, default_value=False, output_shape=tf.cast(anchors_label_shape, tf.int64), validate_indices=False ) # Now we need to find the anchors that are the best for each of the # gt_boxes. We overwrite the previous anchors_label with this # because setting the best anchor for each gt_box has priority. # 这里与上面基本类似, 只不过这里是在对应的位置上标记类别标签 best_anchors_gt_labels = tf.sparse_to_dense( sparse_indices=best_anchor_idxs, sparse_values=gt_boxes[:, 4] + 1, default_value=-1, output_shape=tf.cast(anchors_label_shape, tf.int64), validate_indices=False, name="get_right_labels_for_bestboxes" ) # [-1, 1~20(前景anchor)] =====> [-1, 1~20(+对于每个真实框最接近的anchor)] # 修改anchors_label中, 每个真实框对应的最好的anchor的标签为对应的类别 # 注意, 到这里的时候, 可能会觉得存在一个anchors会对应多个类别, 但是没关系, 这里是一 # 个更新操作, 这里的优先级更高, 可以覆盖之前的判定 anchors_label = tf.where( condition=is_best_box, x=best_anchors_gt_labels, y=anchors_label, name="update_labels_for_bestbox_anchors" ) # Use the worst backgrounds (the bgs whose probability of being fg is # the greatest). # (num_anchors, (num_classes+1)[1:]), 选择各个anchors的前景类别的对应概率 cls_probs = probs[:, 1:] # 得到所有anchors的针对各个前景类别的最大概率 max_cls_probs = tf.reduce_max(cls_probs, axis=1) # Exclude boxes with IOU > `background_threshold_high` with any GT. # 最终被认定为背景的anchors, 是和所有真实框的最大IoU值小于背景阈值(0.2), 而且又是 # 标签被标定为小于等于0的anchors, 选择其中的有着较大的最大分类概率的作为最后的背景 # 标签小于等于0, 实际上就是标签小于0, 因为标签为0尚未确定 iou_less_than_bg_tresh_high_filter = tf.less_equal( max_overlaps, self._background_threshold_high ) # 这里确定了没有被通过IoU来判定为前景类别的anchors, 从中选择阈值小于背景上限阈值 # 的, 作为后续的操作对象 bg_anchors = tf.less_equal(anchors_label, 0) bg_overlaps_filter = tf.logical_and( iou_less_than_bg_tresh_high_filter, bg_anchors ) # 在非前景anchors中选择和真实框的IoU小于阈值的, 在其位置上, 保留其针对各个前景类 # 别的最大概率, 留作后面选择背景anchors用, 其余的标记为 -1 # ques: 这里满足上面的条件的应该是对应的负样本/背景了呀, 怎么还保留可能的概率呢? # ans: 为了从剩下的anchors中进行筛选最终背景anchors, 也需要一个判定规则, 这里使用 # 这些anchors的最大分类概率, 选择概率较大的 max_cls_probs = tf.where( condition=bg_overlaps_filter, x=max_cls_probs, y=tf.fill(dims=anchors_label_shape, value=-1.), ) # We calculate up to how many backgrounds we desire based on the # final number of foregrounds and the hard minning ratio. # 两句指令得到前景anchors数量 num_fg_mask = tf.greater(anchors_label, 0.0) num_fg = tf.cast(tf.count_nonzero(num_fg_mask), tf.float32) # 得到背景数量=3*num_fg num_bg = tf.cast(num_fg * self._hard_negative_ratio, tf.int32) # 从max_clas_prob里选择前num_bg(各个类别概率最大值)的anchors作为背景anchors # 索引 top_k_bg = tf.nn.top_k(max_cls_probs, k=num_bg) # 将对应的anchors位置标定位true, 这里当做下面的一个条件 set_bg = tf.sparse_to_dense( sparse_indices=top_k_bg.indices, sparse_values=True, default_value=False, output_shape=anchors_label_shape, validate_indices=False ) # [-1, 1~20(+对于每个真实框最接近的anchor)] =====> [-1, 0, 1~20] ######### # 设定背景标签0 anchors_label = tf.where( condition=set_bg, x=tf.fill(dims=anchors_label_shape, value=0.), y=anchors_label ) # Next step is to calculate the proper bbox targets for the labeled # anchors based on the values of the ground-truth boxes. # We have to use only the anchors labeled >= 1, each matching with # the proper gt_boxes # Get the ids of the anchors that mater for bbox_target comparison. # 只针对前景anchors is_anchor_with_target = tf.greater( anchors_label, 0 ) anchors_with_target_idx = tf.where( condition=is_anchor_with_target ) # Get the corresponding ground truth box only for the anchors with # target. # 从每个anchors对应的最好的真实框索引中, 选择所有前景anchors对应的真实框索引, 进而 # 确定对应的真实框坐标 gt_boxes_idxs = tf.gather( best_gtbox_for_anchors_idx, anchors_with_target_idx ) # Get the values of the ground truth boxes. anchors_gt_boxes = tf.gather_nd( gt_boxes[:, :4], gt_boxes_idxs ) # We create the same array but with the anchors # 确定所有前景anchors的对应的anchor在原图的坐标 anchors_with_target = tf.gather_nd( all_anchors, anchors_with_target_idx ) # We create our targets with bbox_transform # 获取所有前景anchors对应的真实框相对于自身坐标的偏移量和缩放量 bbox_targets = encode( anchors_with_target, anchors_gt_boxes, variances=self._variances ) # We unmap targets to anchor_labels (containing the length of # anchors) # 在all_anchors中前景anchors的位置上更新对应的bbox_targets bbox_targets = tf.scatter_nd( indices=anchors_with_target_idx, updates=bbox_targets, shape=tf.cast(tf.shape(all_anchors), tf.int64) ) return anchors_label, bbox_targets -
x i j p x^p_{ij} xijp表示第i个anchor/default box与类别p的第j个ground truth相匹配, x i j p x^p_{ij} xijp不是1(匹配)就是0。有 ∑ i x i j p ≥ 1 \sum_i x_{ij}^p \geq 1 ∑ixijp≥1, 即对于类别p的第j个真实框至少有一个anchor与之匹配
这里的j从公式上来看并没有约束, 也就是说, 这里的j反映出来的, 只是对于第i个anchor在类别p下是否有真实框匹配, 换句话说, 就是是否可以通过IoU来确定该anchor有匹配的真实框(有两种方式, 一种是对于所有真实框的最大的IoU值大于设定的阈值, 就选择那个最好的真实框, 另一种是从真实框的角度来看的, 就是, 对于某个真实框而言, 该框可能是最好的一个anchor, 此 时就选择这个真实框(这里也是为了保证所有的真实框都有对应的anchor)).
考虑下:
这里的 x i j p x^p_{ij} xijp存在的意义是什么? 由于对于正样本而言, 不同正样本对应的类别可能是不同的, 而对于负样本, 对应的类别确是唯一的, 就是背景这一类. 所以说, 对于负样本, 只需要计算对于类别0上的对数概率. 而对于正样本而言, 也实际上就是计算对应于其对应类别p的对数概率, 但是, 不同正样本对应的类别p是不同的, 所以这里通过限制一个x, 来保证只计算对应类别p的结果.
所以这个公式, 可以改写为:
L c o n f ( x , c ) = − ∑ p ∈ { P o s , N e g } x i p l o g ( c ^ i p ) p > 0 为 P o s ; p = 0 为 N e g x i p 是 一 个 o n e − h o t 编 码 后 的 长 为 21 为 一 维 张 量 , 不 同 位 置 上 的 1 , 对 应 不 同 的 类 别 = > > 可 以 转 化 为 s o f t m a x 交 叉 熵 = > > t f . n n . s o f t m a x _ c r o s s _ e n t r o p y _ w i t h _ l o g i t s ( x i , c i ) L_{conf}(x,c)=-\sum_{p \in \{Pos, Neg\}}x^p_ilog(\hat{c}^p_{i}) \\ p>0为Pos;\ p=0为Neg\\ x^p_i 是一个one-hot编码后的长为21为一维张量, 不同位置上的1, 对应不同的类别\\ =>>可以转化为softmax交叉熵=>>\\ tf.nn.softmax\_cross\_entropy\_with\_logits(x_i, c_i) Lconf(x,c)=−p∈{Pos,Neg}∑xiplog(c^ip)p>0为Pos; p=0为Negxip是一个one−hot编码后的长为21为一维张量,不同位置上的1,对应不同的类别=>>可以转化为softmax交叉熵=>>tf.nn.softmax_cross_entropy_with_logits(xi,ci)所以在luminoth代码中, 直接使用了交叉熵求解:
# 类别预测得分结果 ==>> 预测得到的类别 cls_pred = prediction_dict['cls_pred'] # 调整后的anchors对应的类别标签(这个是直接从真实框身上得来的) ==>> 匹配真实框得到的类别(0, 1~20) cls_target = tf.cast(prediction_dict['target']['cls'], tf.int32) # Transform to one-hot vector, one-hot编码后, 对应的就是前面的x^p_{ij} cls_target_one_hot = tf.one_hot( cls_target, depth=self._num_classes + 1, name='cls_target_one_hot' ) cross_entropy_per_proposal = ( tf.nn.softmax_cross_entropy_with_logits( labels=cls_target_one_hot, logits=cls_pred ) )
处理流程
总体结构图
分类检测器结构图(RPN+分类)
这里会生成75个默认框, 每个特征点3个默认框. 12个坐标点, 3x(20+1)个类别判定值. 256=12+63+
这里似乎有些问题?
也就k=4的时候, 得到sk=0.2+0.7/5*3=0.62, 那这里如何得出对应的min_size?
应该是0.62/5*300
def adjust_bboxes(bboxes, old_height, old_width, new_height, new_width): """ Adjusts the bboxes of an image that has been resized. 对于输入的bboxes进行调整, bboxes / old * new Args: bboxes: Tensor with shape (num_bboxes, 4). old_height: Float. Height of the original image. old_width: Float. Width of the original image. new_height: Float. Height of the image after resizing. new_width: Float. Width of the image after resizing. Returns: Tensor with shape (num_bboxes, 4), with the adjusted bboxes. """ # x_min, y_min, x_max, y_max = np.split(bboxes, 4, axis=1) x_min = bboxes[:, 0] / old_width y_min = bboxes[:, 1] / old_height x_max = bboxes[:, 2] / old_width y_max = bboxes[:, 3] / old_height # Use new size to scale back the bboxes points to absolute values. x_min = x_min * new_width y_min = y_min * new_height x_max = x_max * new_width y_max = y_max * new_height # Concat points and label to return a [num_bboxes, 4] tensor. return np.stack([x_min, y_min, x_max, y_max], axis=1) ...... # 这里的anchors是根据特征图生成的参考框 ######################################## # Generate anchors (generated only once, therefore we use numpy) # 基于各个卷积层的特征图, 使用anchor参数, 生成所有的anchors(坐标基于特征图) raw_anchors_per_featmap = generate_raw_anchors( feature_maps, self._anchor_min_scale, self._anchor_max_scale, self._anchor_ratios, self._anchors_per_point ) anchors_list = [] # 遍历所有的特征图, 将其映射到原图, 并进行剪裁 for i, (feat_map_name, feat_map) in enumerate(feature_maps.items()): # TODO: Anchor generation should be simpler. We should create # them in image scale from the start instead of scaling # them to their feature map size. # 这里的feat_map大大小应该是(num_batch, height, weight, channel) feat_map_shape = feat_map.shape.as_list()[1:3] # anchors从特征图映射到原图(坐标基于原图) scaled_bboxes = adjust_bboxes( raw_anchors_per_featmap[feat_map_name], feat_map_shape[0], feat_map_shape[1], self.image_shape[0], self.image_shape[1] ) clipped_bboxes = clip_boxes(scaled_bboxes, self.image_shape) anchors_list.append(clipped_bboxes) # 将所有的anchors的原图上的坐标结果进行合并 anchors = np.concatenate(anchors_list, axis=0) anchors = tf.convert_to_tensor(anchors, dtype=tf.float32)
默认框生成器
有min_size=168, aspect_ratio=2
结果汇总
确定默认框
在默认框基础上利用定位网络进行调整
对调整结果进行类别确定
确定该框的预测结果
对所有结果进行处理筛选,保留得到最终结果
详细结构
38这里, 默认框是3个么?
不一定, 详细内容可见代码
NMS
考虑到我们的方法产生大量边界框,在推断期间执行非最大值抑制(nms)是必要的。
-
通过使用0.01的置信度阈值,我们可以过滤大部分边界框。
-
然后,我们应用nms在每个类别0.45的Jaccard重叠阈值,并保留每张图像的前200个检测。
对于SSD300和20个VOC类别,这个步骤每张图像花费大约1.7毫秒,接近在所有新增层上花费的总时间(2.4毫秒)。我们使用Titan X、cuDNN v4、Intel Xeon [email protected]以及批大小为8来测量速度。
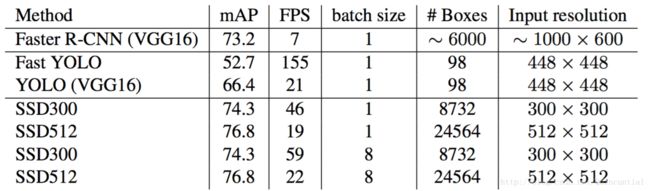
Pascal VOC2007 test上的结果。
SSD300是唯一可以取得 70 % 70\% 70%以上mAP的实时检测方法。通过使用更大的输入图像,SSD512在精度上超过了所有方法同时保持近似实时的速度。
实际效果
- 具体结构如开头"基本结构"一节所述
- 我们在conv4_3上设置了尺度为0.1的默认边界框
- 对于conv4_3,conv10_2和conv11_2,我们只在每个特征映射位置上关联了4个默认边界框——忽略 1 3 \frac {1} {3} 31和3的长宽比
- 对于所有其它层,放置了6个默认边界框
- 由于conv4_3具有不同的特征尺度,我们使用[12]中介绍的L2归一化技术将特征映射中每个位置的特征范数缩放到20,并在反向传播过程中学习这个尺度
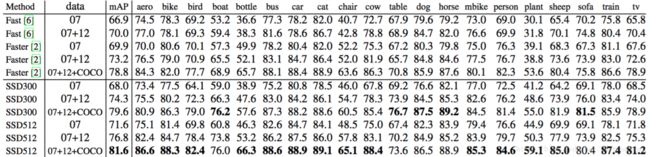
PASCAL VOC2007 test检测结果
-
显示了我们的低分辨率SSD300模型已经比Fast R-CNN更准确
-
当我们用更大的 512 × 512 512\times 512 512×512输入图像上训练SSD时,它更加准确,超过了Faster R-CNN 1.7%的mAP
-
如果我们用更多的(即07+12)数据来训练SSD,我们看到SSD300已经比Faster R-CNN好1.1%,SSD512比Faster R-CNN好3.6%
-
如果我们将SSD512用 C O C O trainval35k COCO \texttt{trainval35k} COCOtrainval35k来训练模型并在07+12数据集上进行微调,我们获得了最好的结果:81.6%的mAP
性能分析
SSD512在VOC2007 test中的动物,车辆和家具上的性能可视化。
第一行显示由于定位不佳(Loc),与相似类别(Sim)混淆,与其它(Oth)或背景(BG)相关的正确检测(Cor)或假阳性的累积分数。
红色的实线表示随着检测次数的增加,强标准(0.5 Jaccard重叠)下的召回变化。
红色虚线是使用弱标准(0.1 Jaccard重叠)。
最下面一行显示了排名靠前的假阳性类型的分布。
显示了SSD可以检测到高质量(大白色区域)的各种目标类别。它大部分的确信检测是正确的。召回约为85-90%,而“弱”(0.1 Jaccard重叠)标准则要高得多。
与R-CNN[22]相比,SSD具有更小的定位误差,表明SSD可以更好地定位目标,因为它直接学习回归目标形状和分类目标类别,而不是使用两个解耦步骤。
然而,SSD对类似的目标类别(特别是对于动物)有更多的混淆,部分原因是我们共享多个类别的位置。
使用[21]在VOC2007 test设置上不同目标特性的灵敏度和影响。
左边的图显示了BBox面积对每个类别的影响,右边的图显示了长宽比的影响。
BBox区域:XS=超小;S=小;M=中等;L=大;XL=超大。
长宽比:XT=超高/窄;T=高;M=中等;W=宽;XW =超宽。
图4显示SSD对边界框大小非常敏感。
换句话说,它在较小目标上比在较大目标上的性能要差得多。这并不奇怪,因为这些小目标甚至可能在顶层没有任何信息。增加输入尺寸(例如从300×300到512×512)可以帮助改进检测小目标,但仍然有很大的改进空间。积极的一面,我们可以清楚地看到SSD在大型目标上的表现非常好。而且对于不同长宽比的目标,它是非常鲁棒的,因为我们使用每个特征映射位置的各种长宽比的默认框。
模型分析
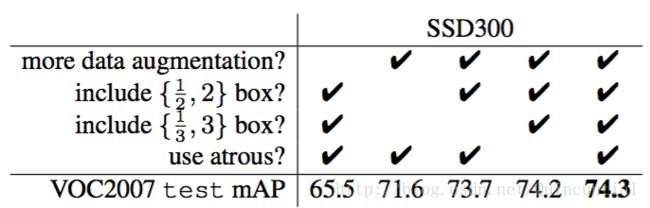
-
数据增强至关重要, Fast和Faster R-CNN使用原始图像和水平翻转来训练。我们使用更广泛的抽样策略,类似于YOLO[5]
-
更多的默认边界框形状会更好, 使用各种默认边界框形状似乎使网络预测边界框的任务更容易
-
使用空洞卷积是的网络更快, 我们根据DeepLab-LargeFOV[17]使用子采样的VGG16的空洞版本
-
多个不同分辨率的输出层更好, SSD的主要贡献是在不同的输出层上使用不同尺度的默认边界框

当我们在一层上堆叠多尺度的边界框时,很多边界框在图像边界上需要小心处理。我们尝试了在Faster R-CNN[2]中使用这个策略,忽略(“No”)在边界上的边界框。
例如,如果我们使用非常粗糙的特征映射(例如conv11_2(1×1)或conv10_2(3×3)),它会大大伤害性能。原因可能是修剪后我们没有足够大的边界框来覆盖大的目标。
当我们主要使用更高分辨率的特征映射时,性能开始再次上升,因为即使在修剪之后仍然有足够数量的大边界框。
如果我们只使用conv7进行预测,那么性能是最糟糕的,这就强化了在不同层上扩展不同尺度的边界框是非常关键的信息。
此外,由于我们的预测不像[6]那样依赖于ROI池化,所以我们在低分辨率特征映射中没有折叠组块的问题[23]。
SSD架构将来自各种分辨率的特征映射的预测结合起来,以达到与Faster R-CNN相当的精确度,同时使用较低分辨率的输入图像。
PASCAL VOC2012

PASCAL VOC2012 test上的检测结果. Fast和Faster R-CNN使用最小维度为600的图像,而YOLO的图像大小为448× 48。数据:“07++12”:VOC2007
trainval,test和VOC2012trainval。“07++12+COCO”:先在COCOtrainval135k上训练然后在07++12上微调。
COCO
为了进一步验证SSD框架,我们在COCO数据集上对SSD300和SSD512架构进行了训练。由于COCO中的目标往往比PASCAL VOC中的更小,因此我们对所有层使用较小的默认边界框。
现在我们最小的默认边界框尺度是0.15而不是0.2,并且conv4_3上的默认边界框尺度是0.07(例如,300×300图像中的21(=300*0.07)个像素).

与Faster相比较, 512版本的对于大型目标, A P ( 4.8 % ) AP(4.8\%) AP(4.8%)和 A R ( 4.6 % ) AR(4.6\%) AR(4.6%)的效果要好得多,但对于小目标, A P ( 1.3 % ) AP(1.3\%) AP(1.3%)和 A R ( 2.0 % ) AR(2.0\%) AR(2.0%)有相对更少的改进。与ION相比,大型和小型目标的AR改进更为相似 ( 5.4 % 和 3.9 % ) (5.4\%和3.9\%) (5.4%和3.9%)。我们推测Faster R-CNN在较小的目标上比SSD更具竞争力,因为它在RPN部分和Fast R-CNN部分都执行了两个边界框细化步骤。
优缺点
优点
通过在不同层级选用不同尺寸、不同比例的anchor,能够找到与ground truth匹配最好的anchor来进行训练,从而使整个结构的精确度更高。
缺点
是对小尺寸的目标识别仍比较差,还达不到Faster R-CNN的水准。
这主要是因为小尺寸的目标多用较低层级的anchor来训练(因为小尺寸目标在较低层级IOU较大),较低层级的特征非线性程度不够,无法训练到足够的精确度。
下图是各种目标识别结构在mAP和训练速度上的比较,可以看到SSD在其中的位置:
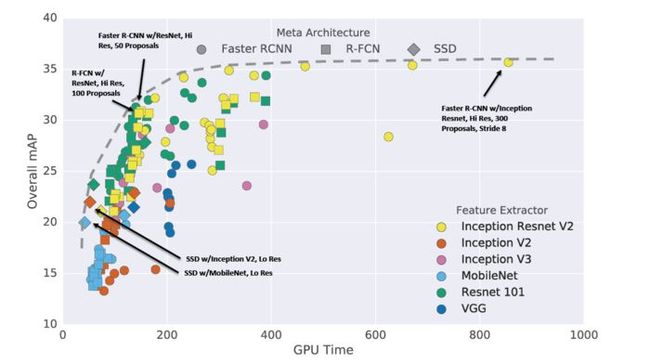
各种目标检测结构的比较
参考资料
luminoth代码注释: https://github.com/lartpang/luminoth/tree/master/luminoth/models/ssd
《论文研读系列》SSD-Single Shot Multibox Detector https://zhuanlan.zhihu.com/p/33386939
http://lanbing510.info/2017/08/28/YOLO-SSD.html
https://docs.google.com/presentation/d/1rtfeV_VmdGdZD5ObVVpPDPIODSDxKnFSU0bsN_rgZXc/pub?start=false&loop=false&delayms=3000&slide=id.g179f601b72_0_51
http://noahsnail.com/2017/12/11/2017-12-11-Single Shot MultiBox Detector论文翻译——中英文对照/
SSD 系列论文总结 https://zhuanlan.zhihu.com/p/35642094