通俗理解卡尔曼滤波器原理及matlab中实现
写在最前
在B站上看到一个视频,讲解的非常好,可以快速理解卡尔曼滤波器原理,视频网址,我将视频里面讲解的内容整理了下来,加深自己的理解,同时也希望能帮助他人理解。建议大家去看视频。
卡尔曼滤波器
又叫最佳线性滤波器,有很多好处,比如说:实现简单,是一个纯时域的滤波器,不需要进行频域变换,所以在工程上有很多应用。
第一个公式
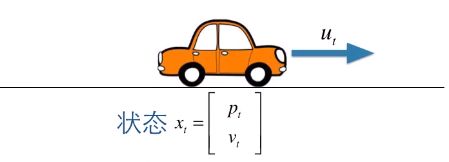
假设有一辆小汽车在路上行驶,用位置p和速度v来表示当前的状态–矩阵形式x,另外驾驶员也可以踩刹车或者踩油门,u为向前或向后的加速度,u表示汽车的控制量,如果没有踩油门,也没有踩刹车,那么u=0,小汽车就做匀速直线运动。
如果已知上一个时刻t-1的状态,那么t时刻的位置和速度就是
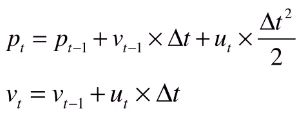
我们观察这两个公式,会发现输出变量是两个输入变量的线性组合。
这就是为什么卡尔曼滤波器是最佳的线性滤波器,因为它只能描述状态与状态之间的线性关系,既然是线性关系,就可以写成矩阵的形式。进一步将两个状态变换矩阵提取出来,最终简化为
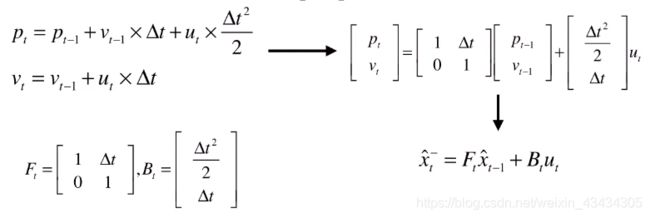
第一个公式:状态预测公式

F是状态转移矩阵,表示从上时刻推测当前状态,B是控制矩阵,表示控制量u如何作用当前时态。^表示估计量,通过观测来尽可能的估计x的值。
第二个公式
有了状态预测公式,就可以推测当前的状态,所有的推测都是包含噪声的,噪声越大,表示推测的偏差也越大。用协方差矩阵来表示。什么是协方差矩阵呢?
先用一维来解释。
假设一维的包含噪声的数据,每次测量的值都不同,但都是围绕在一个中心值的周围,那么表示分布状况最简单的方法是记下中心值和方差。这是假设了一个高斯的分布。

二维的情况
一个二维包含噪声的数据,分别对两个坐标轴投影,在两个轴上都是高斯分布。
那表示它的分布的时候,那么是不是分别记录下来两个高斯分布的中心值和方差就可以了呢?如果两个维度的噪声是独立的,可以这样表示。如果两个维度有相关性,比如,如果一个维度增大了,另一个维度也增大了,也是高斯分布。或者一个维度增大了,另一个维度却减少了,但仍然是高斯分布。
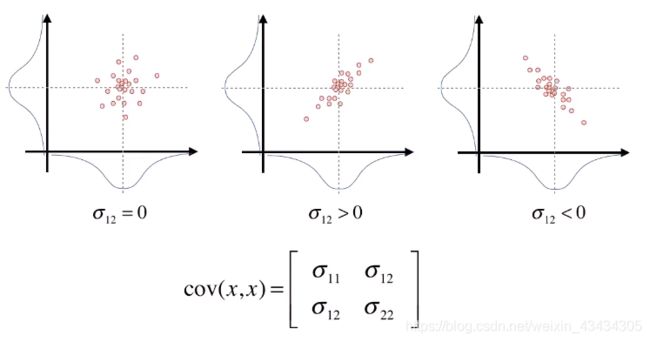
为了表示维度的相关性,除了要记录两个维度的方差,还需要计算它的协方差。
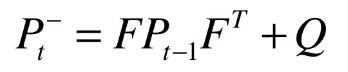
在卡尔曼滤波器中,所有关于不确定性都需要用到协方差矩阵。协方差矩阵用P表示。如何让这种不确定性在每个状态之间传递呢?
需要乘以状态转移矩阵F,至于为什么要乘以两边,这是协方差的性质。

这时候,还需要考虑一件事情,就是我们的预测模型并不是百分百准确,也是包含噪声的。
第二个公式:不确定性在两个状态之间的传递
第三个公式
假设我们在公路一边放置了一个激光测距仪,每个时刻可以观察到小汽车的位置,观测的值记为z,汽车本身的状态到观测状态有一个变换关系,记为H。当然这种变换关系只能是线性关系。则把H写成矩阵形式,z和x的维度不一定相同。
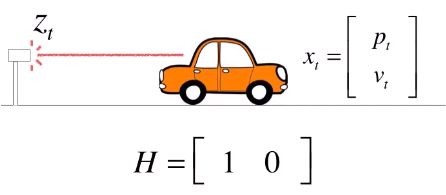
x到z的变换是一种线性变换,H观测矩阵。因为观测也不一定百分百准确,所以加入v为观测值的噪声。这个噪声的协方差矩阵R来表示。由于在这个例子里,观测值是一个一维的值,所以R不是矩阵,是一个单独的值,仅仅表示z的方差。

如果用多种方式来观察小汽车的位置,则z就是一个多维的列向量。包含每一种测量方式的测量值,而每一个测量值都是真实状态的不完全的表现,我们可以从几种不完全的表现中推断出真实的状态,而卡尔曼滤波器数据融合的功能就是在这个观测矩阵中体现出来的。
第三个公式:最佳估计值

后面的括号表示实际的观测值与预测的值之间的残差,K十分关键,它是卡尔曼系数,也叫卡尔曼增益。也是一个矩阵。
第四个公式

卡尔曼增益作用有两方面,一是,权衡预测协方差矩阵和观测协方差的大小,我们是相信预测模型多一点还是相信观测模型多一点,如果是相信预测模型多一点,K就小一点,如果相信观测模型多一点,K就大一点。
二是,把残差的表现形式从观测域转换到状态域。在这个例子里,我们只观察到小汽车的位置,但K里面已经包含了协方差矩阵P的信息,利用位置和速度的相关性,从位置的残差里面推算出了速度的残差,从而可以对状态x的两个维度同时进行修正。
第五个公式
最后一步:噪声协方差矩阵的更新

更新最佳估计值的噪声分布,留给下一步迭代时来用,在这步里,状态的不确定是减小的,而下一步由于噪声的引入,不确定性又会变大,卡尔曼滤波器就是在这种不确定性的变化中寻求一种平衡。
五个公式:

如何在matlab中实现一个卡尔曼滤波器?就上面小车的例子,我们来实现一下:
Z=(1:100); %观测值
noise=randn(1,100); %方差为1的高斯噪声
Z=Z+noise;
X=[0;0]; %状态
P=[1 0;0 1]; %状态协方差矩阵
F=[1 1;0 1]; %状态转移矩阵
Q=[0.0001 0;0 0.0001]; %状态转移协方差矩阵
H=[1 0]; %观测矩阵
R=1; %观测噪声方差
figure;
hold on;
for i=1:100
X_=F*X;
P_=F*P*F'+Q;
K=P_*H'/(H*P_*H'+R);
X=X_+K*(Z(i)-H*X_);
P=(eye(2)-K*H)*P_;
plot(X(1),X(2),'x'); %画点,横轴表示位置,纵轴表示速度
end
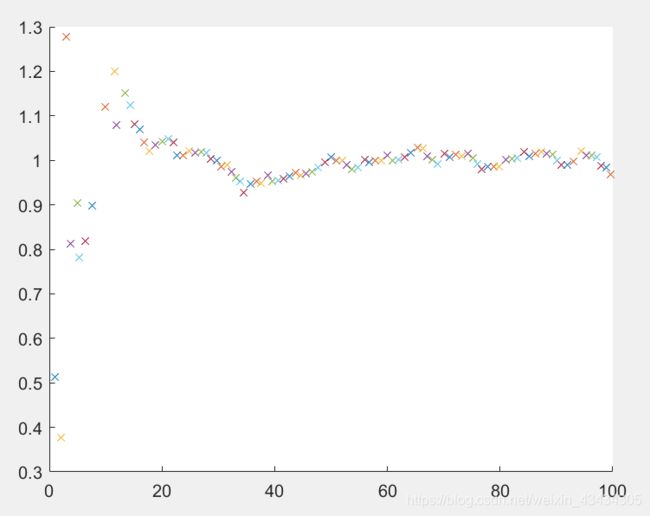
最后结果
最后我们可以看到,迭代很少的次数,就达到了稳定状态。因为我们没有添加控制量,所以小车做匀速直线运动。