图像分割之GraphCut、GrabCut(GMM)
图像分割之(二)Graph Cut(图割)
http://blog.csdn.net/zouxy09
之前对主要的分割方法做了一个概述。那下面我们对其中几个比较感兴趣的算法做个学习。下面主要是Graph Cut和Grab Cut,两者都是基于图论的分割方法。另外OpenCV实现了Grab Cut,具体的源码解读见博文更新。
Graph cuts是一种十分有用和流行的能量优化算法,在计算机视觉领域普遍应用于前背景分割(Image segmentation)、立体视觉(stereo vision)、抠图(Image matting)等。
此类方法把图像分割问题与图的最小割(min cut)问题相关联。首先用一个无向图G=
第一种顶点和边是:第一种普通顶点对应于图像中的每个像素。每两个邻域顶点(对应于图像中每两个邻域像素)的连接就是一条边。这种边也叫n-links。
第二种顶点和边是:除图像像素外,还有另外两个终端顶点,叫S(source:源点,取源头之意)和T(sink:汇点,取汇聚之意)。每个普通顶点和这2个终端顶点之间都有连接,组成第二种边。这种边也叫t-links。
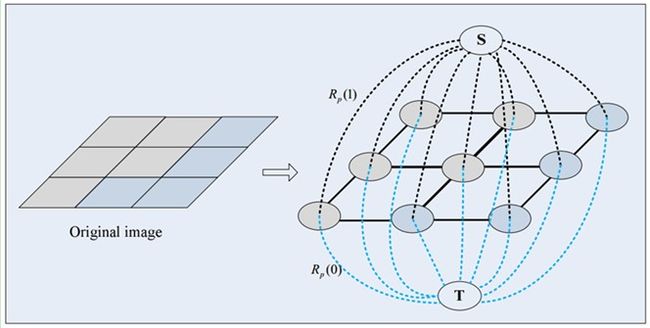
上图就是一个图像对应的s-t图,每个像素对应图中的一个相应顶点,另外还有s和t两个顶点。上图有两种边,实线的边表示每两个邻域普通顶点连接的边n-links,虚线的边表示每个普通顶点与s和t连接的边t-links。在前后景分割中,s一般表示前景目标,t一般表示背景。
图中每条边都有一个非负的权值we,也可以理解为cost(代价或者费用)。一个cut(割)就是图中边集合E的一个子集C,那这个割的cost(表示为|C|)就是边子集C的所有边的权值的总和。
Graph Cuts中的Cuts是指这样一个边的集合,很显然这些边集合包括了上面2种边,该集合中 所有边的断开(????) 会导致残留”S”和”T”图的分开,所以就称为“割”。如果一个割,它的边的所有权值之和最小,那么这个就称为最小割,也就是图割的结果。而福特-富克森定理表明,网路的最大流max flow与最小割min cut相等。所以由Boykov和Kolmogorov发明的max-flow/min-cut算法就可以用来获得s-t图的最小割。这个最小割把图的顶点划分为两个不相交的子集S和T,其中s ∈S,t∈ T和S∪T=V 。这两个子集就对应于图像的前景像素集和背景像素集,那就相当于完成了图像分割。
也就是说图中边的权值就决定了最后的分割结果,那么这些边的权值怎么确定呢?
图像分割可以看成pixel labeling(像素标记)问题,目标(s-node)的label设为1,背景(t-node)的label设为0,这个过程可以通过最小化图割来最小化能量函数得到。那很明显,发生在目标和背景的边界处的cut就是我们想要的(相当于把图像中背景和目标连接的地方割开,那就相当于把其分割了)。同时,这时候能量也应该是最小的。假设整幅图像的标签label(每个像素的label)为L= {l1,l2,,,, lp },其中li为0(背景)或者1(目标)。那假设图像的分割为L时,图像的能量可以表示为:
E(L)=aR(L)+B(L)
其中,R(L)为区域项(regional term),B(L)为边界项(boundary term),而a就是区域项和边界项之间的重要因子,决定它们对能量的影响大小。如果a为0,那么就只考虑边界因素,不考虑区域因素。E(L)表示的是权值,即损失函数,也叫能量函数,图割的目标就是优化能量函数使其值达到最小。
区域项:
 ,其中Rp(lp)表示为像素p分配标签lp的惩罚,Rp(lp)能量项的权值可以通过比较像素p的灰度和给定的目标和前景的灰度直方图来获得,换句话说就是像素p属于标签lp的概率,我希望像素p分配为其概率最大的标签lp,这时候我们希望能量最小,所以一般取概率的负对数值,故t-link的权值如下:
,其中Rp(lp)表示为像素p分配标签lp的惩罚,Rp(lp)能量项的权值可以通过比较像素p的灰度和给定的目标和前景的灰度直方图来获得,换句话说就是像素p属于标签lp的概率,我希望像素p分配为其概率最大的标签lp,这时候我们希望能量最小,所以一般取概率的负对数值,故t-link的权值如下:
Rp(1) = -ln Pr(Ip|’obj’); Rp(0) = -ln Pr(Ip|’bkg’)
由上面两个公式可以看到,当像素p的灰度值属于目标的概率Pr(Ip|’obj’)大于背景Pr(Ip|’bkg’),那么Rp(1)就小于Rp(0),也就是说当像素p更有可能属于目标时,将p归类为目标就会使能量R(L)小。那么,如果全部的像素都被正确划分为目标或者背景,那么这时候能量就是最小的。
边界项:

其中,p和q为邻域像素,边界平滑项主要体现分割L的边界属性,B
好了,现在我们来总结一下:我们目标是将一幅图像分为目标和背景两个不相交的部分,我们运用图分割技术来实现。首先,图由顶点和边来组成,边有权值。那我们需要构建一个图,这个图有两类顶点,两类边和两类权值。普通顶点由图像每个像素组成,然后每两个邻域像素之间存在一条边,它的权值由上面说的“边界平滑能量项”来决定。还有两个终端顶点s(目标)和t(背景),每个普通顶点和s都存在连接,也就是边,边的权值由“区域能量项”Rp(1)来决定,每个普通顶点和t连接的边的权值由“区域能量项”Rp(0)来决定。这样所有边的权值就可以确定了,也就是图就确定了。这时候,就可以通过min cut算法来找到最小的割,这个min cut就是权值和最小的边的集合,这些边的断开恰好可以使目标和背景被分割开,也就是min cut对应于能量的最小化。而min cut和图的max flow是等效的,故可以通过max flow算法来找到s-t图的min cut。目前的算法主要有:
1) Goldberg-Tarjan
2) Ford-Fulkerson
3) 上述两种方法的改进算法
权值:

Graph cut的3x3图像分割示意图:我们取两个种子点(就是人为的指定分别属于目标和背景的两个像素点),然后我们建立一个图,图中边的粗细表示对应权值的大小,然后找到权值和最小的边的组合,也就是(c)中的cut,即完成了图像分割的功能。

上面具体的细节请参考:
《Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D Images》(Boykov,iccv01)这篇paper讲怎么用graphcut来做image segmentation。
在Boykov 和 Kolmogorov 俩人的主页上就有大量的code。包括maxflow/min-cut、stereo algorithms等算法:
http://pub.ist.ac.at/~vnk/software.html
http://vision.csd.uwo.ca/code/
康奈尔大学的graphcuts研究主页也有不少信息:
http://www.cs.cornell.edu/~rdz/graphcuts.html
《Image Segmentation: A Survey of Graph-cut Methods》(Faliu Yi,ICSAI 2012)
图像分割之(三)从Graph Cut到Grab Cut
http://blog.csdn.net/zouxy09
上一文对GraphCut做了一个了解,而现在我们聊到的GrabCut是对其的改进版,是迭代的Graph Cut。OpenCV中的GrabCut算法是依据《"GrabCut" - Interactive Foreground Extraction using Iterated Graph Cuts》这篇文章来实现的。该算法利用了图像中的纹理(颜色)信息和边界(反差)信息,只要少量的用户交互操作即可得到比较好的分割结果。那下面我们来了解这个论文的一些细节。另外OpenCV实现的GrabCut的源码解读见下一个博文。接触时间有限,若有错误,还望各位前辈指正,谢谢。
GrabCut是微软研究院的一个课题,主要功能是分割和抠图。个人理解它的卖点在于:
(1)你只需要在目标外面画一个框,把目标框住,它就可以完成良好的分割:

(2)如果增加额外的用户交互(由用户指定一些像素属于目标),那么效果就可以更完美:

(3)它的Border Matting技术会使目标分割边界更加自然和perfect:
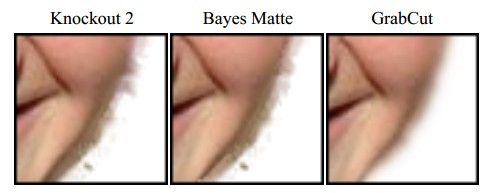
当然了,它也有不完美的地方,一是没有任何一个算法可以放之四海而皆准,它也不例外,如果背景比较复杂或者背景和目标相似度很大,那分割就不太好了;二是速度有点慢。当然了,现在也有不少关于提速的改进。
OK,那看了效果,我们会想,上面这些效果是怎么达到的呢?它和Graph Cut有何不同?
(1)Graph Cut的目标和背景的模型是灰度直方图,Grab Cut取代为RGB三通道的混合高斯模型GMM;
(2)Graph Cut的能量最小化(分割)是一次达到的,而Grab Cut取代为一个不断进行分割估计和模型参数学习的交互迭代过程;
(3)Graph Cut需要用户指定目标和背景的一些种子点,但是Grab Cut只需要提供背景区域的像素集就可以了。也就是说你只需要框选目标,那么在方框外的像素全部当成背景,这时候就可以对GMM进行建模和完成良好的分割了。即Grab Cut允许不完全的标注(incomplete labelling)。
1、颜色模型
我们采用RGB颜色空间,分别用一个K个高斯分量(一取般K=5)的全协方差GMM(混合高斯模型)来对目标和背景进行建模。于是就存在一个额外的向量k = {k1, . . ., kn, . . ., kN},其中kn就是第n个像素对应于哪个高斯分量,kn∈ {1, . . . K}。对于每个像素,要不来自于目标GMM的某个高斯分量,要不就来自于背景GMM的某个高斯分量。
所以用于整个图像的Gibbs能量为(式7):
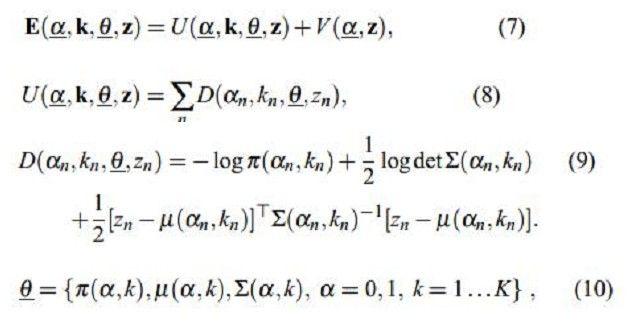
其中,U就是区域项,和上一文说的一样,你表示一个像素被归类为目标或者背景的惩罚,也就是某个像素属于目标或者背景的概率的负对数。我们知道混合高斯密度模型是如下形式:
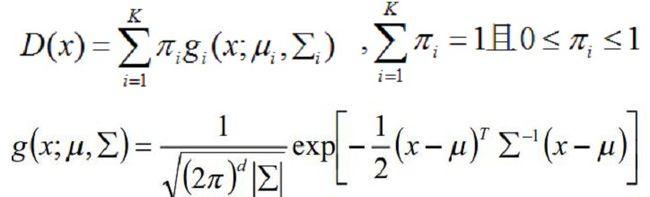
所以取负对数之后就变成式(9)那样的形式了,其中GMM的参数θ就有三个:每一个高斯分量的权重π、每个高斯分量的均值向量u(因为有RGB三个通道,故为三个元素向量)和协方差矩阵∑(因为有RGB三个通道,故为3x3矩阵)。如式(10)。也就是说描述目标的GMM和描述背景的GMM的这三个参数都需要学习确定。一旦确定了这三个参数,那么我们知道一个像素的RGB颜色值之后,就可以代入目标的GMM和背景的GMM,就可以得到该像素分别属于目标和背景的概率了,也就是Gibbs能量的区域能量项就可以确定了,即图的t-link的权值我们就可以求出。那么n-link的权值怎么求呢?也就是边界能量项V怎么求?

边界项和之前说的Graph Cut的差不多,体现邻域像素m和n之间不连续的惩罚,如果两邻域像素差别很小,那么它属于同一个目标或者同一背景的可能性就很大,如果他们的差别很大,那说明这两个像素很有可能处于目标和背景的边缘部分,则被分割开的可能性比较大,所以当两邻域像素差别越大,能量越小。而在RGB空间中,衡量两像素的相似性,我们采用欧式距离(二范数)。这里面的参数β由图像的对比度决定,可以想象,如果图像的对比度较低,也就是说本身有差别的像素m和n,它们的差||zm-zn||还是比较低,那么我们需要乘以一个比较大的β来放大这种差别,而对于对比度高的图像,那么也许本身属于同一目标的像素m和n的差||zm-zn||还是比较高,那么我们就需要乘以一个比较小的β来缩小这种差别,使得V项能在对比度高或者低的情况下都可以正常工作。常数γ为50(经过作者用15张图像训练得到的比较好的值)。OK,那这时候,n-link的权值就可以通过式(11)来确定了,这时候我们想要的图就可以得到了,我们就可以对其进行分割了。
2、迭代能量最小化分割算法
Graph Cut的算法是一次性最小化的,而Grab Cut是迭代最小的,每次迭代过程都使得对目标和背景建模的GMM的参数更优,使得图像分割更优。我们直接通过算法来说明:
2.1、初始化
(1)用户通过直接框选目标来得到一个初始的trimap T,即方框外的像素全部作为背景像素TB,而方框内TU的像素全部作为“可能是目标”的像素。
(2)对TB内的每一像素n,初始化像素n的标签αn=0,即为背景像素;而对TU内的每个像素n,初始化像素n的标签αn=1,即作为“可能是目标”的像素。
(3)经过上面两个步骤,我们就可以分别得到属于目标(αn=1)的一些像素,剩下的为属于背景(αn=0)的像素,这时候,我们就可以通过这个像素来估计目标和背景的GMM了。我们可以通过k-mean算法分别把属于目标和背景的像素聚类为K类,即GMM中的K个高斯模型,这时候GMM中每个高斯模型就具有了一些像素样本集,这时候它的参数均值和协方差就可以通过他们的RGB值估计得到,而该高斯分量的权值可以通过属于该高斯分量的像素个数与总的像素个数的比值来确定。
2.2、迭代最小化
(1)对每个像素分配GMM中的高斯分量(例如像素n是目标像素,那么把像素n的RGB值代入目标GMM中的每一个高斯分量中,概率最大的那个就是最有可能生成n的,也即像素n的第kn个高斯分量):

(2)对于给定的图像数据Z,学习优化GMM的参数(因为在步骤(1)中我们已经为每个像素归为哪个高斯分量做了归类,那么每个高斯模型就具有了一些像素样本集,这时候它的参数均值和协方差就可以通过这些像素样本的RGB值估计得到,而该高斯分量的权值可以通过属于该高斯分量的像素个数与总的像素个数的比值来确定。):

(3)分割估计(通过1中分析的Gibbs能量项,建立一个图,并求出权值t-link和n-link,然后通过max flow/min cut算法来进行分割):

(4)重复步骤(1)到(3),直到收敛。经过(3)的分割后,每个像素属于目标GMM还是背景GMM就变了,所以每个像素的kn就变了,故GMM也变了,所以每次的迭代会交互地优化GMM模型和分割结果。另外,因为步骤(1)到(3)的过程都是能量递减的过程,所以可以保证迭代过程会收敛。
(5)采用border matting对分割的边界进行平滑等等后期处理。
2.3、用户编辑(交互)
(1)编辑:人为地固定一些像素是目标或者背景像素,然后再执行一次2.2中步骤(3);
(2)重操作:重复整个迭代算法。(可选,实际上这里是程序或者软件抠图的撤销作用)
总的来说,其中关键在于目标和背景的概率密度函数模型和图像分割可以交替迭代优化的过程。更多的细节请参考原文。
《“GrabCut” — Interactive Foreground Extraction using Iterated Graph Cuts》
http://research.microsoft.com/en-us/um/people/ablake/papers/ablake/siggraph04.pdf
OpenCV实现了这个算法(没有后面的border matting过程),下一文我们再解读下它的源代码。