22.C#写算法之A*寻路算法的实现
AStarSearch
每一个格子具有F、G、H这3个属性,如下图:
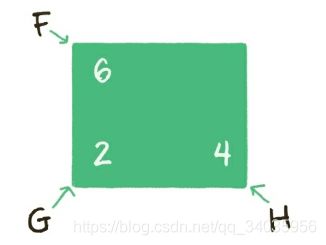
G:从起点走到当前格子的成本,也就是已经花费了多少步。
H:在不考虑障碍的情况下,从当前格子走到目标格子的距离,也就是离目标还有多远。
F:G和H的综合评估,也就是从起点到达当前格子,再从当前格子到达目标格子的总步数。
A星寻路算法代码如下:
using System;
using System.Collections.Generic;
namespace Test01
{
class Grid {
public int x;
public int y;
public int f;
public int g;
public int h;
public Grid parent;
public Grid(int x, int y){
this.x = x;
this.y = y;
}
public void InitGrid(Grid parent, Grid end)
{
this.parent = parent;
if (parent != null)
this.g = parent.g + 1;
else
this.g = 1;
this.h = Math.Abs(this.x - end.x) + Math.Abs(this.y - end.y);
this.f = this.g + this.h;
}
}
class AStarPathFinding
{
public static int[,] MAZE = new int[,] {
{0,0,0,0,0,0,0},
{0,0,1,0,0,0,0},
{0,0,1,0,0,0,0},
{0,0,1,0,0,0,0},
{0,0,1,0,0,0,0},
};
private static bool ContainGrid(List grids, int x, int y)
{
foreach (var item in grids)
{
if (item.x == x && item.y == y)
return true;
}
return false;
}
private static bool IsValidGrid(int x, int y, List openList, List closeList)
{
//是否超过边界
if (x < 0 || x >= MAZE.GetLength(0) || y < 0 || y >= MAZE.GetLength(1))
return false;
//是否有障碍物
if (MAZE[x,y] == 1)
return false;
//是否已经在openList中
if (ContainGrid(openList, x, y))
return false;
//是否已经在closeList中
if (ContainGrid(closeList, x, y))
return false;
return true;
}
private static List FindNeighbors(Grid grid, List openList, List closeList)
{
List gridList = new List();
if (IsValidGrid(grid.x, grid.y - 1, openList, closeList))
gridList.Add(new Grid(grid.x, grid.y - 1));
if(IsValidGrid(grid.x,grid.y+1,openList,closeList))
gridList.Add(new Grid(grid.x, grid.y + 1));
if (IsValidGrid(grid.x - 1, grid.y, openList, closeList))
gridList.Add(new Grid(grid.x - 1, grid.y));
if (IsValidGrid(grid.x + 1, grid.y, openList, closeList))
gridList.Add(new Grid(grid.x + 1, grid.y));
return gridList;
}
private static Grid FindMinGrid(List openList)
{
Grid tempGrid = openList[0];
foreach (var item in openList)
{
if (item.f < tempGrid.f)
tempGrid = item;
}
return tempGrid;
}
///
/// A*寻路主逻辑
///
/// 迷宫起点
/// 迷宫终点
/// openList = new List();
List closeList = new List();
//把起点加入openList
openList.Add(start);
//主循环,每一轮检查1个当前方格节点
while (openList.Count > 0)
{
//在openList中查找F值最小的节点,将其作为当前方格节点
Grid currentGrid = FindMinGrid(openList);
//将当前节点从openList中移除
openList.Remove(currentGrid);
//当前方格节点进入closeList
closeList.Add(currentGrid);
//找到所有邻近节点
List neighbors = FindNeighbors(currentGrid, openList, closeList);
foreach (var item in neighbors)
{
if (!openList.Contains(item))
{
//邻近节点不在openList中,标记“父节点”、G、H、F,并放入openList
item.InitGrid(currentGrid, end);
openList.Add(item);
}
}
//如果终点在openList中,直接返回终点格子
foreach (var item in openList)
{
if (item.x == end.x && item.y == end.y)
return item;
}
}
//openList用尽,仍然找不到终点,说明终点不可到达,返回空
return null;
}
static void Main(string[] args)
{
Console.WriteLine("Start");
//设置起点和终点
Grid starGrid = new Grid(2, 1);
Grid endGrid = new Grid(2, 5);
//搜索迷宫终点
Grid resultGrid = AStarSearch(starGrid, endGrid);
//回溯迷宫路径
List path = new List();
while (resultGrid != null)
{
path.Add(new Grid(resultGrid.x, resultGrid.y));
resultGrid = resultGrid.parent;
}
//输出迷宫和路径,路径用*表示
for (int i = 0; i < MAZE.GetLength(0); i++)
{
for (int j = 0; j < MAZE.GetLength(1); j++)
{
if (ContainGrid(path, i, j))
Console.Write("*, ");
else
Console.Write(MAZE[i, j] + ", ");
}
Console.WriteLine();
}
Console.WriteLine();
}
}
}