Linux驱动开发(2)------- 字符设备驱动基础
目录
- 一,字符设备驱动工作原理
- 二,字符设备驱动代码实践
- 三,应用程序如何调用驱动
- 1.驱动设备文件的创建
- 2.添加读写接口
- 3.读写接口实践
- 四,驱动中如何操控硬件
- 1.静态映射操作LED
- 2.动态映射操作LED
一,字符设备驱动工作原理
1、系统整体工作原理
(1)应用层->API->设备驱动->硬件
(2)API:open、read、write、close等
(3)驱动源码中提供真正的open、read、write、close等函数实体
2、file_operations结构体

(1)元素主要是函数指针,用来挂接实体函数地址
(2)每个设备驱动都需要一个该结构体类型的变量
(3)设备驱动向内核注册时提供该结构体类型的变量
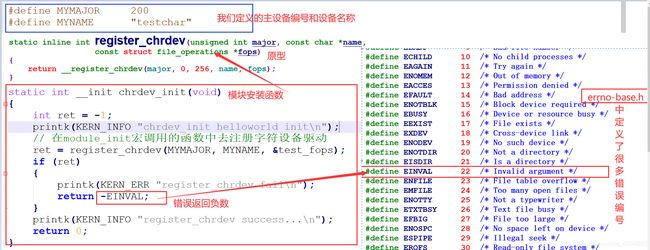
3、注册字符设备驱动
驱动向内核注册函数register_chrdev()在(#include

(1)作用,驱动向内核注册自己的file_operations
(2)参数和返回值:
| 返回值 | |
|---|---|
| int | 返回0表示注册成功,返回一个负整数表示注册失败 |
| 参数 | |
|---|---|
| unsigned int major | 主设备号,可人为向内核申请,不能与已有的设备号重复 |
| const char *name | 输入型参数,表示驱动设备的名字 |
| const struct file_operations *fops | 输入型参数,用于内核注册的结构体指针 |
4、内核如何管理字符设备驱动
(1)内核中有一个数组(最多有256个元素)用来存储注册的字符设备驱动,数组下标跟主设备号有关系
(2)register_chrdev内部将我们要注册的驱动的信息存储在数组中相应的位置
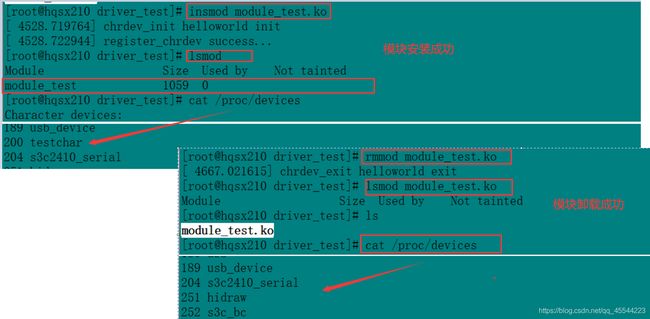
(3)cat /proc/devices查看内核中已经注册过的字符设备驱动(和块设备驱动)

二,字符设备驱动代码实践
1、思路和框架
(1)目的:给空模块添加驱动壳子
(2)核心工作量:file_operations及其元素填充、注册驱动
2、如何动手写驱动代码
(1)脑海里先有框架,知道自己要干嘛
(2)细节代码不需要一个字一个字敲,可以到内核中去寻找参考代码复制过来改
(3)写下的所有代码必须心里清楚明白,不能似懂非懂
3、开始动手
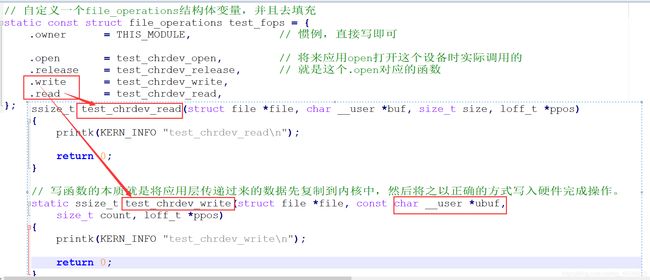
(1)先定义file_operations结构体变量
(2)open和close函数原型确定、内容填充


4、注册驱动
(1)主设备号的选择(cat /proc/devices 查看当前可用的主设备号,确定没用过的先随便定一个)
(2)返回值的检测
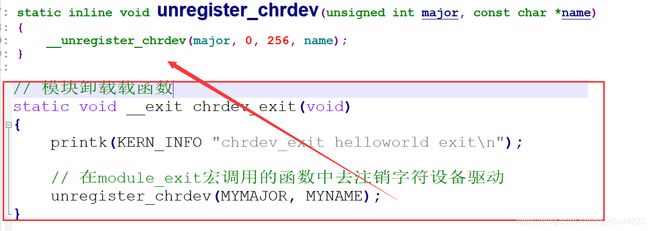
(3)模块卸载
5、驱动测试
(1)编译等 make && make cp
(2)insmod并且查看设备注册的现象
(3)rmmod并且查看设备注销的现象
6、让内核自动分配主设备号
![]()
到此阶段的源码:(makefile还不用改,记得包含头文件
#include 三,应用程序如何调用驱动
1.驱动设备文件的创建
(1)设备文件的关键信息是:设备号 = 主设备号 + 次设备号,使用ls -l去查看设备文件,就可以得到这个设备文件对应的主次设备号。
(2)使用mknod创建设备文件:mknod /dev/xxx c 主设备号 次设备号

2.添加读写接口
1、在驱动代码中添加
2、在应用代码中添加

3、应用和驱动之间的数据交换
(1)copy_from_user,用来将数据从用户空间复制到内核空间
(2)copy_to_user,用来将数据从内核空间复制到用户空间
注意:复制是和mmap的映射相对应去区分的
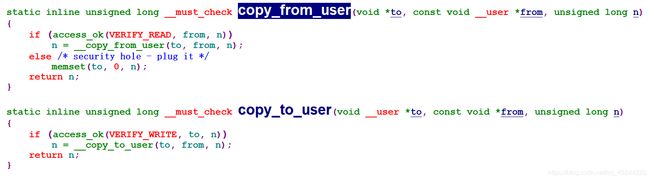
注意:copy_from_user函数的返回值定义,和常规有点不同。返回值如果成功复制则返回0,如果 不成功复制则返回尚未成功复制剩下的字节数。
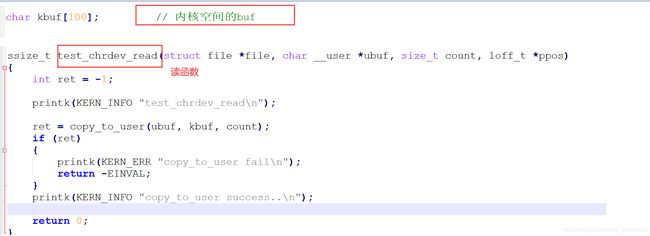
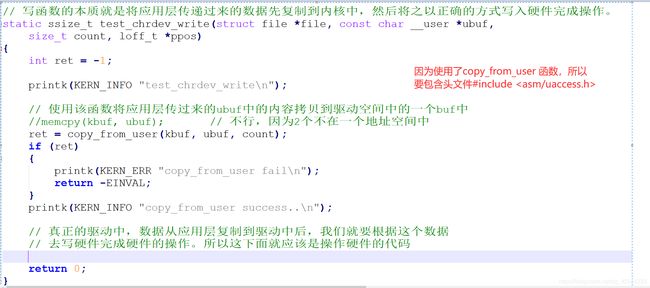
3.读写接口实践
1、完成write和read函数
2、读写回环测试

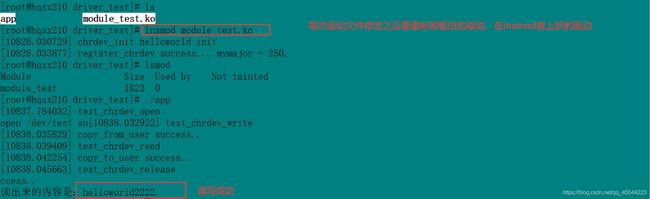
3、总结
(1)目前为止应用已经能够读写驱动(中的内存)
(2)后续工作:添加硬件操作代码
附上到此为止的源码:
驱动源码:
#include 应用层源码:
#include makefile:
#ubuntu的内核源码树,如果要编译在ubuntu中安装的模块就打开这2个
#KERN_VER = $(shell uname -r)
#KERN_DIR = /lib/modules/$(KERN_VER)/build
# 开发板的linux内核的源码树目录
KERN_DIR = /root/driver/kernel
obj-m += module_test.o
all:
make -C $(KERN_DIR) M=`pwd` modules
arm-linux-gcc app.c -o app
cp:
cp *.ko /x210_porting/rootfs/rootfs/driver_test
cp app /x210_porting/rootfs/rootfs/driver_test
.PHONY: clean
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf app
四,驱动中如何操控硬件
1、还是那个硬件
(1)硬件物理原理不变
(2)硬件操作接口(寄存器)不变
(3)硬件操作代码不变
2、哪里不同了?
(1)寄存器地址不同。原来是直接用物理地址,现在需要用该物理地址在内核虚拟地址空间相对应的虚拟地址。寄存器的物理地址是CPU设计时决定的,从datasheet中查找到的。
(2)编程方法不同。裸机中习惯直接用指针操作寄存器地址,而kernel中习惯用封装好的io读写函数来操作寄存器,以实现最大程度可移植性。
3、内核的虚拟地址映射方法
(1)为什么需要虚拟地址映射:更好维护,可移植
(2)内核中有2套虚拟地址映射方法:动态和静态
(3)静态映射方法的特点:
内核移植时以代码的形式硬编码(实质就是宏定义),如果要更改必须改源代码后重新编译内核
在内核启动时建立静态映射表,到内核关机时销毁,中间一直有效
对于移植好的内核,你用不用他都在那里
(4)动态映射方法的特点:
驱动程序根据需要随时动态的建立映射、使用、销毁映射,映射是短期临时的
4、如何选择虚拟地址映射方法
(1)2种映射并不排斥,可以同时使用
(2)静态映射类似于C语言中全局变量,动态方式类似于C语言中malloc堆内存
(3)静态映射的好处是执行效率高,坏处是始终占用虚拟地址空间;动态映射的好处是按需使用虚拟地址空间,坏处是每次使用前后都需要代码去建立映射&销毁映射(还得学会使用那些内核函数的使用)
1.静态映射操作LED
1、关于静态映射
(1)不同版本内核中静态映射表位置、文件名可能不同
(2)不同SoC的静态映射表位置、文件名可能不同
(3)所谓映射表其实就是头文件中的宏定义
2、三星版本内核中的静态映射表
(1)主映射表位于:arch/arm/plat-s5p/include/plat/map-s5p.h
CPU在安排寄存器地址时不是随意乱序分布的,而是按照模块去区分的。每一个模块内部的很多个寄存器的地址是连续的。所以内核在定义寄存器地址时都是先找到基地址,然后再用基地址+偏移量来寻找具体的一个寄存器。
map-s5p.h中定义的就是要用到的几个模块的寄存器基地址。
map-s5p.h中定义的是模块的寄存器基地址的虚拟地址。
(2)虚拟地址基地址定义在:arch/arm/plat-samsung/include/plat/map-base.h
#define S3C_ADDR_BASE (0xFD000000) // 三星移植时确定的静态映射表的基地址,表中的所有虚拟地址都是以这个地址+偏移量来指定的
(3)GPIO相关的主映射表位于:arch/arm/mach-s5pv210/include/mach/regs-gpio.h
表中是GPIO的各个端口的基地址的定义
(4)GPIO的具体寄存器定义位于:arch/arm/mach-s5pv210/include/mach/gpio-bank.h
它们的层级关系:

3、参考裸机中的操作方法添加LED操作代码

4、添加驱动中的写函数
(1)先定义好应用和用户之间的控制接口,这个是由自己来定义的。譬如定义为:应用向驱动写"on"则驱动让LED亮,应用向驱动写"off",驱动就让LED灭,应用向驱动写"flash"则驱动让LED闪烁。
(2)应用和驱动的接口定义做的尽量简单,譬如用1个字目来表示。譬如定义为:应用写"1"表示灯亮,写"0"表示让灯灭。
注:应用层一般用来满足用户需求,写更多的功能函数;驱动层一般只简单实现硬件的功能,比如控制LED的亮灭。
5、写应用来测试写函数
6、驱动和应用中来添加读功能
注:内核中也有自己的menset()和strcmp();函数用法跟应用层一样,在驱动中使用时要包含头文件#include
应用层app源代码:
#include 驱动源代码:
#include makefile不变。
2.动态映射操作LED
1、如何建立动态映射
(1)request_mem_region,向内核申请(报告)需要映射的内存资源。
(2)ioremap,真正用来实现映射,传给他物理地址他给你映射返回一个虚拟地址
2、如何销毁动态映射
(1)iounmap ,解除映射
(2)release_mem_region,申请释放
注意:映射建立时,是要先申请再映射;然后使用;使用完要解除映射时要先解除映射再释放申请。
3、代码实践
(1)2个寄存器分开独立映射

(2)多个寄存器在一起映射

详解见我的博客字符设备驱动高级–多寄存器映射操作硬件