CV理论基础(三):基于关键点的特征描述子sift、surf、orb等;LBP、Gabor
计算机视觉理论基础(三)
- ==基于关键点的特征描述子==
- 局部特征:SIFT
- 计算步骤:
- 相关概念
- 尺度空间
- 高斯金字塔
- 具体过程
- 缺点
- SURF
- 具体过程
- 特点
- 相关概念:Haar-like特征
- ORB
- BRIEF
- 其他特征提取
- LBP
- 具体过程:
- 改进的LBP:
- 特点
- Gabor
- 相关资源
基于关键点的特征描述子
SIFT、SURF、ORB
局部特征:SIFT
基于尺度空间不变的特征描述
特点:具有良好的不变性、独特性好信息量丰富、多量性、计算比之前的快
计算步骤:
(1)在DoG尺度空间中获取极值点,即关键点:LoG尺度空间、DoG尺度空间
(2)对关键点处理:位置插值,获得精确的关键点;去除边缘点
(3)关键点的方向估计:找主方向为达到旋转不变性
(4)关键点描述子的生成:区域坐标旋转;计算采样区域的直方图
相关概念
尺度空间
使用不同 σ \sigma σ的LOG对图片进行滤波
使用LOG,则后续计算量极大,可以使用DOG代替LOG,用差分代替微分


高斯金字塔
高斯金字塔是在传统金字塔的基础上,对每层用不同的参数 σ \sigma σ做高斯模糊,是的每一层金字塔有多张高斯模糊图像

octave同一个尺度下参数不同的一组图片,每层从下到上越来越模糊,下面一层的倒数第三张通过隔点降采样得到上面一层最后一张。在小的上面找大特征,大的上面找大特征。
具体过程
(1)计算高斯差分DoG空间
不同octave乘 σ \sigma σ,相同尺度的图片用了不同的高斯核模糊后,相邻相减
在同一组内,不同层图像的尺寸是一样的,后一层图像的高斯平滑因子σ是前一层图像平滑因子的k倍;
在不同组内,后一组第一个图像是前一组倒数第三个图像的二分之一采样,图像大小是前一组的一半;


(2)获取DoG空间极值点
判断极值点:以 X X X为检测点,其周围的点,同层的8个点+上层9个点+下层9个点,与监测点相比较都大/都小,则是极值点

DoG空间极值点是关键点
圆半径 → \to →特征点尺度;圆心 → \to →特征点坐标

(3)特征点方向估计:
在尺度上计算梯度直方图:以特征点为中心,以 3 × 1.5 σ 3 \times 1.5\sigma 3×1.5σ归纳到8个方向
获取最高值方向为关键点主方向
为了匹配的稳定性,将超过最高值80%的方向,称为辅方向

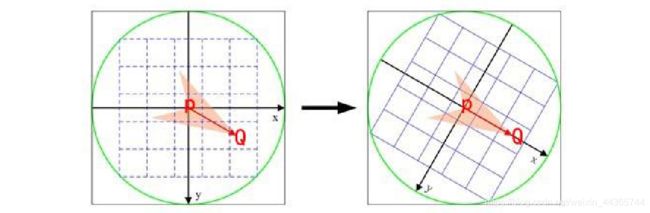
为了保证特征矢量具有旋转不变性,需要以特征点为中心,将特征点附近邻域内的图像旋转一个方向角 θ \theta θ,即将原图像x轴转到与主方向相同的方向
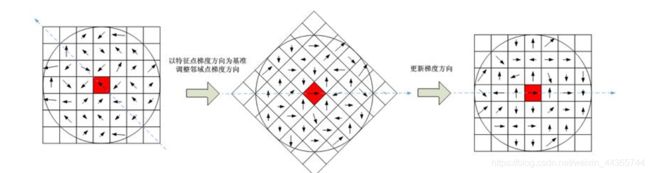
(4)计算特征点描述子
在旋转后的坐标上采样 16 × 16 16\times16 16×16的像素窗: 4 × 4 4\times4 4×4网格,8方向直方图,共128维
每一个点对应一个梯度,归纳到8个饼中,串在一起形成一个向量,即关键点基于它主方向的邻近区域的特征描述


缺点
计算太复杂,如果不借助硬件加速或专门的图像处理器很难实现
SURF
SURF(Speeded-Up Robust Features)算子是Herbert Bay等人在2006年提出的,它是对SIFT的改进,可将速度提高3倍。
将SIFT一部分运算进行简化:
(1)将SIFT中的高斯二阶微分的模板Hessian矩阵进行简化,使得卷积平滑操作仅需要转换成加减运算
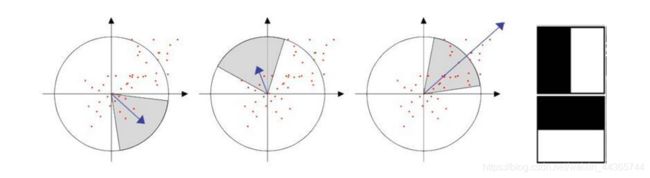
(2)在方向确定阶段,在圆形区域计算x,y方向的haar小波响应,找到模最大的扇形方向
缺点:尺度不变性,旋转不变性
具体过程
(1)找特征点:对原图进行变换,变换图是原图每个像素的Hessian矩阵行列式的近似值构成的。Hessian求取时先高斯平滑(去噪),再求二阶导数。对于离散的像素点,用模板卷积形成的,使用Haar模板代替即可。
hessain矩阵和高斯平滑结合会形成1,2这样柔和模糊的模板

(2)旋转不变:统计特征点领域内的Haar小波特征。即以特征点为中心,计算半径为6s领域内,统计60度扇形内所有点在水平x和垂直y方向的Haar小波响应总和。然后60度扇形以一定间隔进行旋转,最后将最大值那个扇形方向作为该特征点主方向。
其中,s是特征点所有的尺度值
(3)计算:
在特征点周围取一个正方形框,框的边长为20s(s是所检测到该特征点所在的尺度)。该框带方向,即检测出来的主方向。
最终,SURF的特征点特征向量维度是64维。然后把该框分为16个子区域,每个子区域统计25个像素的水平方向和垂直方向的harr小波特征,这里的水平和垂直方向都是相对主方向而言的。

特点

相关概念:Haar-like特征
(1)Haar-like特征分为边缘特征、线性特征、中心特征和对角线特征,这些特征组合成特征模板
特征模板内有白色和黑色两种矩形,并定义该模板的特征值为白色矩形像素和减去黑色矩形像素和
Haar特征值反映了图像的灰度变化情况
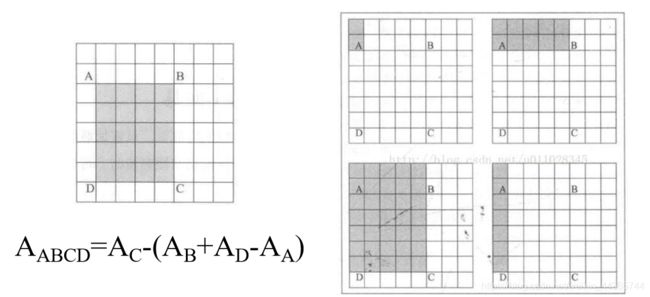
(2)快速计算:积分图
同一个像素如果被包含在不同的Haar-like的特征模板中,会被重复计算多次。积分图是根据四个角点就能计算区域内的像素和的方法。
Hessian矩阵:两阶偏微分矩阵
ORB
ORB特征基于FAST角点的特征点检测和BRIEF特征描述技术,是对FAST角点与BRIEF描述子的一种结合与改进。快,一定程度上比sift准。
FAST角点检测的缺点是:缺乏尺度不变性,可以通过构建高斯金字塔,然后在每一层金字塔图像上检测角点,来实现尺度不变性。
BRIEF缺点:缺乏旋转不变性,需要给BRIEF加上旋转不变性。
ORB对BRIEF的改进:
ORB在计算BRIEF描述子时的坐标系是以关键点为圆心,以关键点和取点区域的形心(圆形)的连线为X轴建立坐标系。
计算形心时,圆心区域上每个点的质量是其对应的像素值。
BRIEF
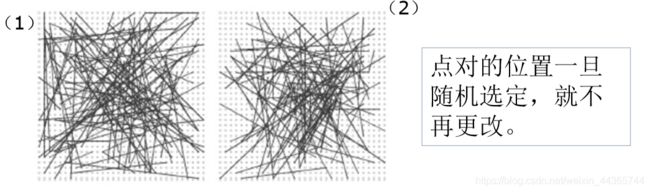
BRIEF需要先平滑图像,然后在特征点周围选择一个Patch,在这个Patch内通过一种选定的方法来挑选出来 n d n_d nd个点对。
比较点对中两点像素的大小,进行如下赋值:

所有 n d n_d nd个点对,都进行比较,生成一个 n d n_d nd长的二进制串。
点对生成的方式如下(共5种):
(1)X和Y都服从在 [ − S 2 , S 2 ] [-\frac{{S}}{2},\frac{{S}}{2}] [−2S,2S]范围内的均匀分布,且相互独立
(2)X和Y都服从均值为0,方差为 S 2 25 \frac{{S^2}}{25} 25S2的高斯分布,且相互独立,即X和Y都以原点为中心,进行同方差的高斯分布。高斯分布中心点密,边缘稀疏
其他特征提取
LBP、Gabor
LBP
LBP 局部二值模式
具体过程:
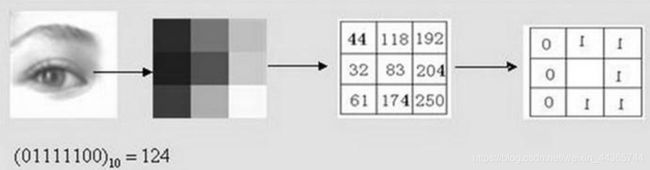
(1)将每个像素点与周围点大小进行比较:半径为R的圆上,均匀采样P个点,大小量化为0或1。多个bit组成一个数,统计每个数的直方图。
(2)旋转不变性:将LBP周围的二进制码按位旋转,取二进制码最小的值作为最终的LBP值。

改进的LBP:
将 3 × 3 3 \times 3 3×3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,这种LBP特征叫做Extended LBP,也叫Circular LBP

特点
LBP特征具有灰度不变性和旋转不变性
Gabor
Gabor:
Gabor是一个用于边缘提取的线性滤波器,其频率和方向表达与人类视觉系统类似,能够提供良好的方向选择和尺度选择特性,对光照变化不敏感。适合纹理分析。
Gabor滤波器:
使用一个三角函数与一个高斯函数叠加得到Gabor滤波器。Gabor滤波器组类似人类视觉系统,多频率/尺度,多方向。
频域:属于加窗傅里叶变换
空域:一个高斯核函数和正弦平面波的乘积

Gabor滤波器组:
3尺度,8方向

相关资源
LBP特征原理
SIFT检测
SURF检测
Harris角点检测
特征匹配(有bug)