曲线拟合——最小二乘拟合(附代码)
曲线拟合——最小二乘拟合(附代码)
- 曲线拟合
- 1 一元函数的最小二乘拟合
-
- 1.1 线性回归(直线的最小二乘拟合)
-
- 1.1.1 直线的最佳拟合方法
- 1.1.2 如何计算
- 1.1.3 误差量化分析
- 1.2 多项式回归(多项式的最小二乘拟合)
-
- 1.2.1 推导过程和计算方法
- 1.2.2 误差量化分析
- 2 多元函数的最小二乘拟合
-
- 2.1 多元线性回归
-
- 2.1.1 推导过程和计算方法
- 2.1.2 误差量化分析
- 2.2 多元多项式回归?
- 3 线性回归小结
-
- 线性最小二乘的一般矩阵形式
- 4* 非线性回归
-
- 4.1 非线性关系的线性化
- 4.2* (真正的)非线性回归
- 5 附录(伪代码及C++实现)
-
- 5.1 一元线性回归算法
-
- 5.1.1 伪代码
- 5.1.2 C++实现
- 5.2 一元多项式回归算法
-
- 5.2.1 算法步骤
- 5.2.2 C++实现代码
曲线拟合
先介绍一下拟合和插值的区别。插值,插值曲线必须经过所给定的插值点;拟合,拟合曲线不一定必须经过所给定的点。
(很多书里面对拟合、插值和逼近定义时讲,拟合包含:插值和逼近。这种说法对不对这里不做辩论,我只讲拟合和插值的方法与实现。)
拟合又包括一元函数和多元函数的拟合,通俗的讲,就是对一个变量(一维)和多个变量(多维)拟合的区别。对一个变量拟合叫曲线拟合,对两个变量的拟合可以称为曲面拟合。
本文主要讲一元函数的拟合(曲线拟合),包括直线的最小二乘拟合和多项式的最小二乘拟合;和多元函数的线性最小二乘拟合,对于非线性拟合会简单提及。
ps:关于非线性拟合,由于方法不太一样,会在另一篇文章中非线性回归——非线性函数最小二乘拟合讲到;关于函数插值,后续也会有更新。
1 一元函数的最小二乘拟合
1.1 线性回归(直线的最小二乘拟合)
1.1.1 直线的最佳拟合方法
根据一组二维坐标点 ( x 1 , y 1 ) , ( x 2 , y 2 ) , ( x 3 , y 3 ) … ( x n , y n ) (x_1, y_1), (x_2, y_2), (x_3, y_3)…(x_n, y_n) (x1,y1),(x2,y2),(x3,y3)…(xn,yn),将其进行拟合成一条直线。直线的数学表达式为:
y = a 0 + a 1 x y = a_0+a_1x y=a0+a1x
其中, a 0 a_0 a0和 a 1 a_1 a1为系数,分别表示截距和斜率。
给定若干个点坐标,可以有很多种拟合成直线的方式,哪一种拟合效果最好呢?
如下图所示,给定7个点,随意给出了几种拟合直线,如黑色、蓝色、紫色三条直线,哪一条效果最理想?如何衡量拟合结果好坏呢?

这里我们给出一个定义:误差(或残差)。
误差(或残差),就是y的真实值与由线性方程预测的近似值 a 0 + a 1 x a_0+a_1x a0+a1x之差。用 e e e表示,可得: e = y − a 0 − a 1 x e=y-a_0-a_1x e=y−a0−a1x。
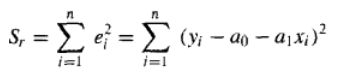
“最佳”拟合准则:通过数据点拟合一条“最佳”直线,使所有数据点的残差的平方和最小。
之所以选用残差的平方和最小,是因为:如果选残差的和最小,或者残差的绝对值之和最小,都会导致拟合效果不好,且结果不唯一。具体如下:
- 如果选残差的和最小:如图(a)所示,它描述的是对两个点的直线拟合结果。显然,最佳拟合的结果就是连接这两个点的直线。然而,任何通过连线中点的直线(除了正好与连线垂直的直线外)都能使式(17.2)的结果为0,因为这样的直线与两个点的误差刚好大小相等但符号相反,所以刚好抵销了。
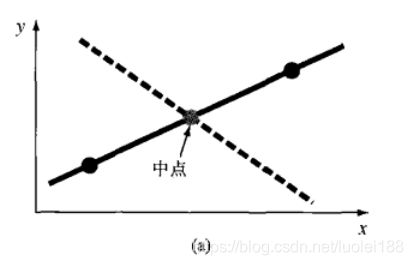
- 如果残差的绝对值之和最小:图(b)说明了为什么这个准则还是不充分的。对于图中的四个点,位于两条虚线之间的任何直线,都会使上式中的绝对值之和最小。因此,使用这个准则也不能得到唯一的最优拟合直线。

啰嗦了这么多,最后我们终于选定了将残差的平方和最小作为“最佳”拟合准则。
也就是使Sr的值最小:
1.1.2 如何计算
那么怎么计算直线的系数 a 0 a_0 a0和 a 1 a_1 a1,才能保证直线最优呢。
方法如下:

令这些偏导数等于0,就可以得到残差平方和Sr的一个最小值。令这些偏导数等于0后,上面的方程
变为:
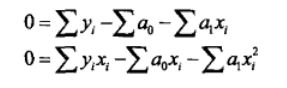

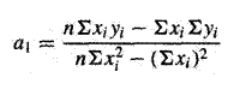
联立解方程组可得:
![]()
![]()
1.1.3 误差量化分析
残差的平方和Sr为:
引入回归直线的“标准差”的概念和计算公式:
此外,还有“相关系数”也用来衡量直线拟合好坏(感兴趣可以查阅相关资料了解),如下:

其中, S t S_t St表示因变量(在本例中为 y i y_i yi)的均值的误差平方和,即 S t = ∑ i = 1 n ( y i − y ˉ ) 2 S_t = \sum_{i=1}^{n} {(y_i-\bar{y})^2} St=∑i=1n(yi−yˉ)2, y ˉ \bar{y} yˉ为 y i y_i yi的平均值。
本文在最后附录里面给出了一元线性回归的伪代码及C++实现,可供参考。
1.2 多项式回归(多项式的最小二乘拟合)
1.2.1 推导过程和计算方法
最小二乘过程很容易推广到用史高阶多项式拟合数据的情况。例如,假设要拟合一个二次多项式:
y = a 0 + a 1 x + a 2 x 2 y = a_0+a_1x+a_2x^2 y=a0+a1x+a2x2
残差平方和Sr计算为:
S r = ∑ i = 1 n ( y i − a 0 − a 1 x − a 2 x 2 ) 2 S_r = \sum_{i=1}^{n} {(y_i-a_0-a_1x-a_2x^2)^2} Sr=i=1∑n(yi−a0−a1x−a2x2)2
对该式关于多项式的每个未知系数取导数,得到:
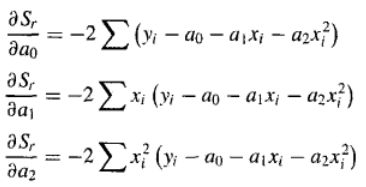
令导数为0,整理后得到:

方程组3个方程是线性的,有3个未知数: a 0 a_0 a0, a 1 a_1 a1和 a 2 a_2 a2,可以通过解方程组得到 a 0 a_0 a0, a 1 a_1 a1和 a 2 a_2 a2的值。
二次多项式的情况很容易推广到m次多项式的情况:
y = a 0 + a 1 x + a 2 x 2 + … + a m x m y = a_0+a_1x+a_2x^2+…+a_mx^m y=a0+a1x+a2x2+…+amxm
残差平方和Sr计算为:
S r = ∑ i = 1 n ( y i − a 0 − a 1 x − a 2 x 2 − … − a m x m ) 2 S_r = \sum_{i=1}^{n} {(y_i-a_0-a_1x-a_2x^2-…-a_mx^m)^2} Sr=i=1∑n(yi−a0−a1x−a2x2−…−amxm)2
同样求偏导令其为0,可以得到m+1个线性方程的方程组,联立解线性方程组可以得到系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, … , a m a_m am的值。
1.2.2 误差量化分析
同样,标准差的计算公式为:

“相关系数”计算公式如下:
其中, S t S_t St表示因变量(在本例中为 y i y_i yi)的均值的误差平方和,即 S t = ∑ i = 1 n ( y i − y ˉ ) 2 S_t = \sum_{i=1}^{n} {(y_i-\bar{y})^2} St=∑i=1n(yi−yˉ)2, y ˉ \bar{y} yˉ为 y i y_i yi的平均值。
本文在最后附录里面给出了一元多项式回归的伪代码,可供参考。
2 多元函数的最小二乘拟合
2.1 多元线性回归
2.1.1 推导过程和计算方法
对于两个或多个自变量的情况,就是一个自变量的推广。对于两个自变量(二维)的情况,回归“直线”就变成了回归“平面”,如下图所示:

对于两个自变量的情况,设方程为:
y = a 0 + a 1 x 1 + a 2 x 2 y = a_0+a_1x_1+a_2x_2 y=a0+a1x1+a2x2
同样的,残差平方和Sr计算为:
S r = ∑ i = 1 n ( y i − a 0 − a 1 x 1 − a 2 x 2 ) 2 S_r = \sum_{i=1}^{n} {(y_i-a_0-a_1x_1-a_2x_2)^2} Sr=i=1∑n(yi−a0−a1x1−a2x2)2

令这些偏微分的值等于零,并采用矩阵形式表示,可得:

解该线性方程组可以得到系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2的值。
同样的,前面的二维情况很容易扩展到m维,即:
y = a 0 + a 1 x 1 + a 2 x 2 + … + a m x m y = a_0+a_1x_1+a_2x_2+…+a_mx_m y=a0+a1x1+a2x2+…+amxm
也是同样的求偏微分,令其为0,解线性方程组,从而得到系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, … , a m a_m am的值。
2.1.2 误差量化分析
多元函数线性回归的标准差的计算公式,于一元函数多显示回归的一模一样;相关系数计算公式也一样。
标准差的计算公式:
“相关系数”计算公式:
其中, S t S_t St表示因变量(在本例中为 y i y_i yi)的均值的误差平方和,即 S t = ∑ i = 1 n ( y i − y ˉ ) 2 S_t = \sum_{i=1}^{n} {(y_i-\bar{y})^2} St=∑i=1n(yi−yˉ)2, y ˉ \bar{y} yˉ为 y i y_i yi的平均值。
2.2 多元多项式回归?
很多人想着,既然有一元线性回归,有一元多项式回归,有多元线性回归,那是不是应该也有多元多项式回归?
答案却是,不存在的。或者说,大多数书里面是没有的。
细细思考一下,就知道,多元多项式回归?其实没那么简单:
如果说,
一元线性回归,有一个变量 x x x,两个系数 a 0 a_0 a0, a 1 a_1 a1;
一元多项式回归,有一个变量 x x x,m+1个系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, … , a m a_m am;
多元线性回归,有m个变量 x 1 x_1 x1, x 2 x_2 x2, x 3 x_3 x3, … , x m x_m xm,m+1个系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, … , a m + 1 a_{m+1} am+1;
那么,对于多元线性回归,如果m个变量相互独立(就是不存在 x i p x j q {x_i}^p{x_j}^q xipxjq这种形式),那么对于m个变量的n次多项式,也会存在m*n+1个系数,解方程组计算量庞大;而如果m个变量不相互独立,那就更。。。复杂了。
3 线性回归小结
线性最小二乘的一般矩阵形式
前面介绍了三种类型的回归方法:简单线性回归、多项式回归和多元线性回归。
事实上,这三种回归方法都属于一般形式的线性最小了二乘模型:
y = a 0 + a 1 z 1 + a 2 z 2 + … + a m z m y = a_0+a_1z_1+a_2z_2+…+a_mz_m y=a0+a1z1+a2z2+…+amzm
其中, z 1 , z 2 , … , z m z_1, z_2, …,z_m z1,z2,…,zm为m个基函数(basis function) 。
很容易看出,简单线性回归和多元线性回归归为这个模型;如果基函数是简单的单项式,即: z 1 = x 1 , z 2 = x 2 , … , z m = x m z_1=x^1, z_2=x^2, …,z_m=x^m z1=x1,z2=x2,…,zm=xm,那么多项式回归也可以归为该类模型。
若将给定的n个点坐标代入 y = a 0 + a 1 z 1 + a 2 z 2 + … + a m z m y = a_0+a_1z_1+a_2z_2+…+a_mz_m y=a0+a1z1+a2z2+…+amzm,可得到n个线性方程组,表示为矩阵的形式:
Y = [ Z ] A {Y}=[Z]{A} Y=[Z]A

其中,m是模型中变量的个数,n是数据点的个数。

因为大多数情况下,n>m+1,所以[Z]不是一个方阵。因此,这个方程组属于过约束,不能直接求解。要计算相对条件下的最优解,就是使残差平方和最小的解。
而模型的残差平方和可以定义如下:

同样的,为了使Sr达到最小,需要对关于该式的每个系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, … , a m + 1 a_{m+1} am+1取偏导数,并令得到的每个方程等于0。于是可以表示成如下简洁的矩阵形式:
![]()
然后求解该方程组,即可得到系数 a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, … , a m + 1 a_{m+1} am+1的值。
(感兴趣的可以用前面介绍的简单线性回归、多项式回归及多元线性的函数来验证。)
4* 非线性回归
4.1 非线性关系的线性化
非线性模型中有3种类型可以线性化:指数方程,幂方程,饱和增长率方程。分别如下:
1.指数方程:
y = a 1 e a 2 x y = a_1e^{a_2x} y=a1ea2x
2.幂方程:
y = a 1 x a 2 y = a_1x^{a_2} y=a1xa2
2.饱和增长率方程:
y = a 1 x x + a 2 y = a_1\frac{x}{x+a_2} y=a1x+a2x
对上述3种形式,可取自然对数将其线性化,结果如下:
指数方程取自然对数: l n y = l n a 1 + a 2 x lny = lna_1+a_2x lny=lna1+a2x
lny与x的关系图是一条斜率为a_2,截距为lna_1的直线。
幂方程取10为底的对数: l o g y = l o g a 1 + a 2 l o g x logy = loga_1+a_2logx logy=loga1+a2logx
log y与log x的关系图是一条斜率为 a 2 a_2 a2,截距为 l o g a 1 loga_1 loga1的直线。
饱和增长率方程取自然对数: 1 y = a 2 a 1 1 x + 1 a 1 \frac{1}{y} = \frac{a_2}{a_1}\frac{1}{x}+\frac{1}{a_1} y1=a1a2x1+a11
于是, 1 y \frac{1}{y} y1与 1 x \frac{1}{x} x1的关系图是一条斜率为 a 2 a 1 \frac{a_2}{a_1} a1a2,截距为 1 a 1 \frac{1}{a_1} a11的直线
然后,采用上面的线性回归的方法处理。
4.2* (真正的)非线性回归
对于如 y = a 1 ( 1 − e − a 2 x ) y = a_1(1-e^{-a_2x}) y=a1(1−e−a2x)形式的函数,是不能线性化的。
需要用牛顿迭代的方法来处理。具体的可参见:非线性回归——非线性函数最小二乘拟合。
5 附录(伪代码及C++实现)
5.1 一元线性回归算法
5.1.1 伪代码

5.1.2 C++实现
//直线的最小二乘拟合
LinearFitting(Vector <Point2d> points, double &lineDir, double &lineDis)
{
int count = points.size();
double sumX = 0, sumY = 0, sumXY = 0, sumSqrX =0,
for (int i = 0; i < count; i++)
{
sumX += points[i].x;
sumY += points[i].y;
sumXY += points[i].x * points[i].y;
sumSqrX += points[i].x * points[i].x;
}
lineDir = (count*sumXY - sumX*sumY)/(count*sumSqrX - sumX*sumX);
lineDis = (sumY - lineDir*sumX)/count;
//计算回归相关系数
double st = 0, sr = 0;
double yMid = sumY/n;
double xMid = sumX/n;
for (int j = 0; j < count; j++)
{
st += (yi - yMid)*(yi - yMid);
double tmpe = yi - lineDis - lineDir*xi;
sr += tmpe *tmpe;
}
double Syx = sqrt(sr/count-2);
double R2 = (st - sr)/st;
}
5.2 一元多项式回归算法
5.2.1 算法步骤

5.2.2 C++实现代码
(待更新)