TensorFlow 2.0深度学习算法实战 第十章 卷积神经网络
第十章 卷积神经网络
-
- 10.1 全连接网络的问题
-
- 10.1.1 局部相关性
- 10.1.2 权值共享
- 10.1.3 卷积运算
- 10.2 卷积神经网络
-
- 10.2.1 单通道输入和单卷积核
- 10.2.2 多通道输入和单卷积核
- 10.2.3 多通道输入、多卷积核
- 10.2.4 步长
- 10.2.5 填充
- 10.3 卷积层实现
-
- 10.3.1 自定义权值
- 10.3.2 卷积层类
- 10.4 LeNet-5 实战
- 10.5 表示学习
- 10.6 梯度传播
- 10.7 池化层
- 10.8 BatchNorm 层
-
-
-
- 10.8.1 前向传播
- 10.8.2 反向更新
- 10.8.3 BN 层实现
- 10.9 经典卷积网络
-
- 10.9.1 AlexNet
- 10.9.2 VGG 系列
- 10.9.3 GoogLeNet
- 10.10 CIFAR10 与 VGG13 实战
- 10.11 卷积层变种
-
- 10.11.1 空洞卷积
- 10.11.2 转置卷积
- + − 为倍数
- + − 不为倍数
- 矩阵角度
- 转置卷积实现
- 10.11.3 分离卷积
- 10.12 深度残差网络
-
- 10.12.1 ResNet 原理
- 10.12.2 ResBlock 实现
- 10.13 DenseNet
- 10.14 CIFAR10 与 ResNet18 实战
-
-
当前人工智能还未达到人类 5 岁水平,不过在感知方面进步飞快。未来在机器语音、视觉识别领域,五到十年内超越人类没有悬念。−沈向洋
我们已经介绍了神经网络的基础理论、TensorFlow 的使用方法以及最基本的全连接层网络模型,对神经网络有了较为全面、深入的理解。但是对于深度学习,我们尚存一丝疑惑。深度学习的深度是指网络的层数较深,一般有 5 层以上,而目前所介绍的神经网络层数大都实现为 5 层之内。那么深度学习与神经网络到底有什么区别和联系呢?
本质上深度学习和神经网络所指代的是同一类算法。1980 年代,基于生物神经元数学模型的多层感知机(Multi-Layer Perceptron,简称 MLP)实现的网络模型就被叫作神经网络。由于当时的计算能力受限、数据规模较小等因素,神经网络一般只能训练到很少的层数,我们把这种规模的神经网络叫做浅层神经网络(Shallow Neural Network)。浅层神经网络不太容易轻松提取数据的高层特征,表达能力一般,虽然在诸如数字图片识别等简单任务上取得不错效果,但很快被 1990 年代新提出的支持向量机所超越。
加拿大多伦多大学教授 Geoffrey Hinton 长期坚持神经网络的研究,但由于当时支持向量机的流行,神经网络相关的研究工作遇到了重重阻碍。2006 年,Geoffrey Hinton 提出了一种逐层预训练的算法,可以有效地初始化 Deep Belief Networks(DBN)网络,从而使得训练大规模、深层数(上百万的参数量)的神经网络成为可能。在论文中,GeoffreyHinton 把深层的神经网络叫做 Deep Neural Network,这一块的研究也因此称为 DeepLearning(深度学习)。由此看来,深度学习和神经网络本质上指代大体一致,深度学习更侧重于深层次的神经网络的相关研究。深度学习的“深度”将在本章的相关网络模型上得到淋漓尽致的体现。
在学习更深层次的网络模型之前,首先我们来探讨这样一个问题:1980 年代时神经网络的理论研究基本已经到位,为什么却没能充分发掘出深层网络的巨大潜力?通过对这个问题的讨论,我们引出本章的核心内容:卷积神经网络。这也是层数可以轻松达到上百层的一类神经网络。
10.1 全连接网络的问题
首先我们来分析全连接网络存在的问题。考虑一个简单的 4 层全连接层网络,输入是28 × 28打平后为 784 节点的手写数字图片向量,中间三个隐藏层的节点数都是 256,输出层的节点数是 10,如图 10.1 所示。

通过 TensorFlow 快速地搭建此网络模型,添加 4 个 Dense 层,并使用 Sequential 容器封装为一个网络对象:
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers,Sequential,losses,optimizers,datasets
# 创建4层全连接网络
model=keras.Sequential([
layers.Dense(256,activation='relu'),
lsyers.Dense(256,activation='relu'),
layers.Dense(256,activation='relu'),
layers.Dense(10),
])
#build模型,并打印模型信息
model.build(input_shape=(4,784))
model.summary()
利用 summary()函数打印出模型每一层的参数量统计结果,如表 10.1 所示。网络的参数量是怎么计算的呢?对于每一条连接线的权值标量,视作一个参数,因此对输入节点数为,输出节点数为的全连接层来说,张量包含的参数量共有 ∙ 个,向量包含的参数量有个,则全连接层的总参数量为 ∙ + 。以第一层为例,输入特征长度为 784,输出特征长度为 256,当前层的参数量为 784 ∙ 256 + 256= 200960 ,同样的方法可以计算第二、三、四层的参数量分别为: 65792、 65792、5702 ,总参数量约 34 万个。
在计算机中,如果将单个权值保存为 float 类型的变量,至少需要占用 4 个字节内存(Python 语言中float 占用内存更多),那么 34 万个网络参数至少需要约 1.34MB 内存。也就是说,单就存储网络的参数就需要 1.34MB 内存,实际上,网络的训练过程中还需要缓存计算图模型、梯度信息、输入和中间计算结果等,其中梯度相关运算占用资源非常多。

那么训练这样一个网络到底需要多少内存呢?我们可以在现代 GPU 设备上简单模拟一下资源消耗情况。在 TensorFlow 中,如果不设置显存占用方式,那么默认会占用全部显存。这里将 TensorFlow 的显存使用方式设置为按需分配,观测其真实占用的 GPU 显存资源情况,代码如下:
#获取所有GPU设备列表
gpus=tf.config.experimental.list_physical_devices('GPU')
if gpus:
try:
# 设置GPU显存设备为按需分配,增长式
for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu,True)
except RuntimeError as e:
# 异常处理
print(e)
上述代码插入在 TensorFlow 库导入后、模型创建前的位置,通过tf.config.experimental.set_memory_growth(gpu, True)设置 TensorFlow 按需申请显存资源,这样 TensorFlow 占用的显存大小即为运算需要的数量。在 Batch Size 设置为 32 的情况下,x训练时我们观察到显存占用了约 708MB,内存占用约 870MB。由于现代深度学习框架设计考量不一样,这个数字仅做参考。即便如此,我们也能感受到 4 层的全连接层的计算代价并不小。
回到 1980 年代,1.3MB 的网络参数量是什么概念呢?1989 年,Yann LeCun 在手写邮政编码识别的论文中采用了一台 256KB 内存的计算机实现了他的算法,这台计算机还配备了一块 AT&T DSP-32C 的 DSP 计算卡(浮点数计算能力约为 25MFLOPS)。对于 1.3MB的网络参数,256KB 内存的计算机连网络参数都尚且装载不下,更别提网络训练了。由此可见,全连接层较高的内存占用量严重限制了神经网络朝着更大规模、更深层数方向的发展。
10.1.1 局部相关性
接下来我们探索如何避免全连接网络的参数量过大的缺陷。为了便于讨论,我们以图片类型数据为输入的场景为例。对于 2D 的图片数据,在进入全连接层之前,需要将矩阵数据打平成 1D 向量,然后每个像素点与每个输出节点两两相连,我们把连接关系非常形象地对应到图片的像素位置上,如图 10.2 所示。

可以看出,网络层的每个输出节点都与所有的输入节点相连接,用于提取所有输入节点的特征信息,这种稠密的连接方式是全连接层参数量大、计算代价高的根本原因。全连接层也称为稠密连接层(Dense Layer),输出与输入的关系为:
其中nodes()表示 I 层的节点集合。
那么,输出节点是否有必要和全部的输入节点相连接呢?有没有一种近似的简化模型呢?我们可以分析输入节点对输出节点的重要性分布,仅考虑较重要的一部分输入节点,而抛弃重要性较低的部分节点,这样输出节点只需要与部分输入节点相连接,表达为:

其中top( I , j , k I,j,k I,j,k)表示 I I I 层中对于 J J J 层中的 j j j号节点重要性最高的前 k k k个节点集合。通过这种方式,可以把全连接层的 ‖ I ‖ ∙ ‖ J ‖ ‖I‖ ∙ ‖J‖ ‖I‖∙‖J‖个权值连接减少到 k ∙ ‖ J ‖ k ∙ ‖J‖ k∙‖J‖个,其中 ‖ I ‖ ‖I‖ ‖I‖、 ‖ J ‖ ‖J‖ ‖J‖分布表示 I I I、 J J J 层的节点数量。
那么问题就转变为探索 I I I层输入节点对于 j j j号输出节点的重要性分布。然而找出每个中间节点的重要性分布是件非常困难的事情,我们可以针对于具体问题,利用先验知识把这个问题进一步简化。
在现实生活中,存在着大量以位置或距离作为重要性分布衡量标准的数据,比如和自己居住更近的人更有可能对自己影响更大(位置相关),股票的走势预测应该更加关注近段时间的数据趋势(时间相关),图片每个像素点和周边像素点的关联度更大(位置相关)。
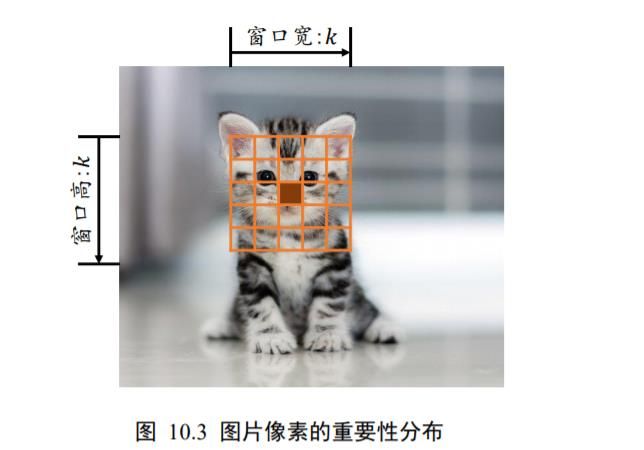
以2D 图片数据为例,如果简单地认为与当前像素欧式距离(Euclidean Distance)小于和等于 k 2 \frac{k}{\sqrt{2}} 2k的像素点重要性较高,欧式距离大于 k 2 \frac{k}{\sqrt{2}} 2k到像素点重要性较低,那么我们就很轻松地简化了每个像素点的重要性分布问题。
如图 10.3 所示,以实心网格所在的像素为参考点,它周边欧式距离小于或等于 k 2 \frac{k}{\sqrt{2}} 2k的像素点以矩形网格表示,网格内的像素点重要性较高,网格外的像素点较低。这个高宽为的窗口称为感受野(Receptive Field),它表了每个像素对于中心像素的重要性分布情况,网格内的像素才会被考虑,网格外的像素对于中心像素会被简单地忽略。
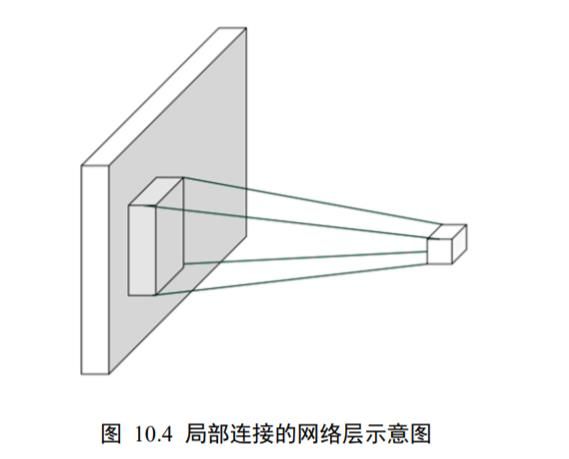
这种基于距离的重要性分布假设特性称为局部相关性,它只关注和自己距离较近的部分节点,而忽略距离较远的节点。在这种重要性分布假设下,全连接层的连接模式变成了如图 10.4 所示,输出节点只与以为中心的局部区域(感受野)相连接,与其它像素无连接。
利用局部相关性的思想,我们把感受野窗口的高、宽记为(感受野的高、宽可以不相等,为了便与表达,这里只讨论高宽相等的情况),当前位置的节点与大小为的窗口内的所有像素相连接,与窗口外的其它像素点无关,此时网络层的输入输出关系表达如下:
其中dist( )表示节点、之间的欧式距离。
10.1.2 权值共享
每个输出节点仅与感受野区域内 × 个输入节点相连接,输出层节点数为 ‖ J ‖ ‖J‖ ‖J‖,则当前层的参数量为 × × ‖ J ‖ ‖J‖ ‖J‖,相对于全连接层的 ‖ I ‖ ‖I‖ ‖I‖ × ‖ J ‖ ‖J‖ ‖J‖,考虑到一般取值较小,如 1、3、5 等, × ≪ ‖ I ‖ ‖I‖ ‖I‖,因此成功地将参数量减少了很多。
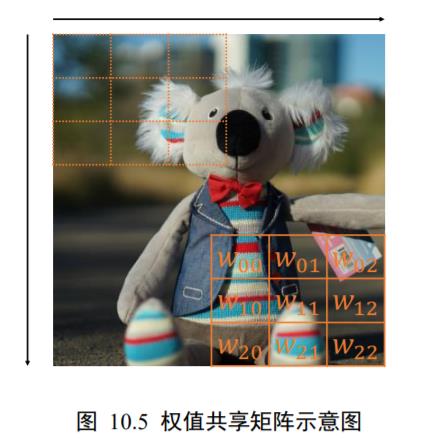
能否再将参数量进一步减少,比如只需要 × 个参数即可完成当前层的计算?答案是肯定的,通过权值共享的思想,对于每个输出节点 o j o_{j} oj,均使用相同的权值矩阵,那么无论输出节点的数量 ‖ J ‖ ‖J‖ ‖J‖是多少,网络层的参数量总是 × 。如图 10.5 所示,在计算左上角位置的输出像素时,使用权值矩阵:
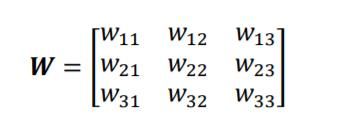
与对应感受野内部的像素相乘累加,作为左上角像素的输出值;在计算右下方感受野区域时,共享权值参数,即使用相同的权值参数相乘累加,得到右下角像素的输出值,此时网络层的参数量只有3 × 3 = 9个,且与输入、输出节点数无关。
通过运用局部相关性和权值共享的思想,我们成功把网络的参数量从 ‖ I ‖ × ‖ J ‖ ‖I‖ × ‖J‖ ‖I‖×‖J‖减少到 K × k K × k K×k(准确地说,是在单输入通道、单卷积核的条件下)。这种共享权值的“局部连接层”网络其实就是卷积神经网络。接下来我们将从数学角度介绍卷积运算,进而正式学习卷积神经网络的原理与计算方法。
10.1.3 卷积运算
在局部相关性的先验下,我们提出了简化的“局部连接层”,对于窗口 × 内的所有像素,采用权值相乘累加的方式提取特征信息,每个输出节点提取对应感受野区域的特征信息。这种运算其实是信号处理领域的一种标准运算:离散卷积运算。离散卷积运算在计算机视觉中有着广泛的应用,这里给出卷积神经网络层从数学角度的阐述。
在信号处理领域,1D 连续信号的卷积运算被定义两个函数的积分:函数()、函数(),其中()经过了翻转(−)和平移后变成( − )。卷积的“卷”是指翻转平移操作,“积”是指积分运算,1D 连续卷积定义为:
( f ⊗ g ) ( n ) = ∫ − ∞ ∞ f ( τ ) g ( n − τ ) d τ (f \otimes g)(n)=\int_{-\infty}^{\infty} f(\tau) g(n-\tau) \mathrm{d} \tau (f⊗g)(n)=∫−∞∞f(τ)g(n−τ)dτ
离散卷积将积分运算换成累加运算:
( f ⊗ g ) ( n ) = ∑ τ = − ∞ ∞ f ( τ ) g ( n − τ ) (f \otimes g)(n)=\sum_{\tau=-\infty}^{\infty} f(\tau) g(n-\tau) (f⊗g)(n)=τ=−∞∑∞f(τ)g(n−τ)
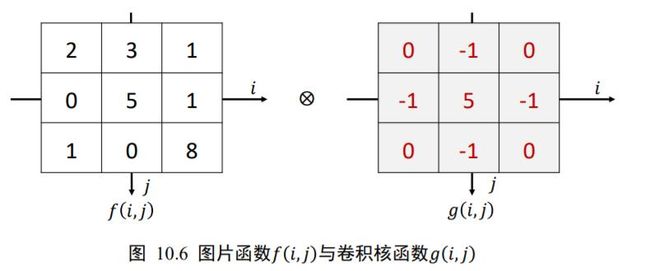
至于卷积为什么要这么定义,限于篇幅不做深入阐述。我们重点介绍 2D 离散卷积运算。在计算机视觉中,卷积运算基于 2D 图片函数(,)和 2D 卷积核(,),其中(,)和(,)仅在各自窗口有效区域存在值,其它区域视为 0,如图 10.6 所示。此时的 2D 离散卷积定义为:
[ f ⊗ g ] ( m , n ) = ∑ i = − ∞ ∞ ∑ j = − ∞ ∞ f ( i , j ) g ( m − i , n − j ) [f \otimes g](m, n)=\sum_{i=-\infty}^{\infty} \sum_{j=-\infty}^{\infty} f(i, j) g(m-i, n-j) [f⊗g](m,n)=i=−∞∑∞j=−∞∑∞f(i,j)g(m−i,n−j)
我们来详细介绍 2D 离散卷积运算。首先,将卷积核( , )函数翻转(沿着和方向各翻转一次),变成(− ,−)。当( ,) = (−1, −1 )时,(− 1− ,− 1− )表示卷积核函数翻转后再向左、向上各平移一个单元,此时:
[ f ⊗ g ] ( − 1 , − 1 ) = ∑ i = − ∞ ∞ ∑ j = − ∞ ∞ f ( i , j ) g ( − 1 − i , − 1 − j ) = ∑ i ∈ [ − 1 , 1 ] ∑ j ∈ [ − 1 , 1 ] f ( i , j ) g ( − 1 − i , − 1 − j ) \begin{aligned} [f \otimes g](-1,-1) &=\sum_{i=-\infty}^{\infty} \sum_{j=-\infty}^{\infty} f(i, j) g(-1-i,-1-j) \\ &=\sum_{i \in[-1,1]} \sum_{j \in[-1,1]} f(i, j) g(-1-i,-1-j) \end{aligned} [f⊗g](−1,−1)=i=−∞∑∞j=−∞∑∞f(i,j)g(−1−i,−1−j)=i∈[−1,1]∑j∈[−1,1]∑f(i,j)g(−1−i,−1−j)
2D 函数只在 ∈[-1,1] , ∈[-1,1] 存在有效值,其它位置为 0。按照计算公式,我们可以得到 ⨂ ( 0,−1 ) =7 ,如下图 10.7 所示:

同样的方法,( ,) = ( 0,−1 )时:
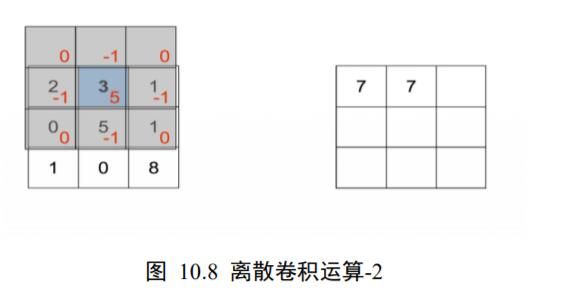
[ f ⊗ g ] ( 0 , − 1 ) = ∑ i ∈ [ − 1 , 1 ] j ∈ [ − 1 , 1 ] f ( i , j ) g ( 0 − i , − 1 − j ) [f \otimes g](0,-1)=\sum_{i \in[-1,1] j \in[-1,1]} f(i, j) g(0-i,-1-j) [f⊗g](0,−1)=i∈[−1,1]j∈[−1,1]∑f(i,j)g(0−i,−1−j)
即卷积核翻转后再向上平移一个单元后对应位置相乘累加, ⨂ (0, −1 ) =7 ,如图 10.8所示。
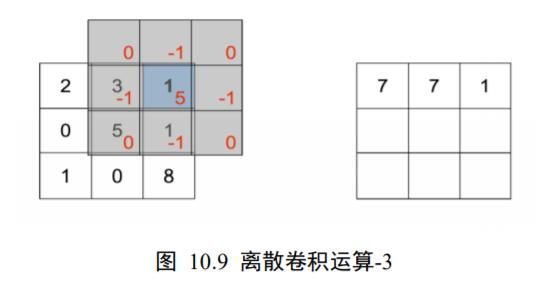
即卷积核翻转后再向右、向上各平移一个单元后对应位置相乘累加, ⨂ (1, −1 ) = 1,如图 10.9 所示。
当( ) = (−1,0 )时:
[ f ⊗ g ] ( − 1 , 0 ) = ∑ i ∈ [ − 1 , 1 ] j ∈ [ − 1 , 1 ] f ( i , j ) g ( − 1 − i , − j ) [f \otimes g](-1,0)=\sum_{i \in[-1,1] j \in[-1,1]} f(i, j) g(-1-i,-j) [f⊗g](−1,0)=i∈[−1,1]j∈[−1,1]∑f(i,j)g(−1−i,−j)
即卷积核翻转后再向左平移一个单元后对应位置相乘累加, ⨂ (−1,0 ) = 1,如图 10.10所示。

按照此种方式循环计算,可以计算出函数 ⨂ ( ) ∈[-1,1] , ∈[-1,1]的所有值,如下图 10.11 所示。

至此,我们成功完成图片函数与卷积核函数的卷积运算,得到一个新的特征图。
回顾“权值相乘累加”的运算,我们把它记为 [ ∙ ] ( ,):
[ f ⋅ g ] ( m , n ) = ∑ i ∈ [ − w / 2 , w / 2 ] ∑ j ∈ [ − h / 2 , h / 2 ] f ( i , j ) g ( i − m , j − n ) [f \cdot g](m, n)=\sum_{i \in[-w / 2, w / 2]} \sum_{j \in[-h / 2, h / 2]} f(i, j) g(i-m, j-n) [f⋅g](m,n)=i∈[−w/2,w/2]∑j∈[−h/2,h/2]∑f(i,j)g(i−m,j−n)
仔细比较它与标准的 2D 卷积运算不难发现,在“权值相乘累加”中的卷积核函数( ,),并没有经过翻转。只不过对于神经网络来说,目标是学到一个函数( ,)使得ℒ越小越好,至于(, )是不是恰好就是卷积运算中定义的“卷积核”函数并不十分重要,因为我们并不会直接利用它。在深度学习中,函数( ,)统一称为卷积核(Kernel),有时也叫 Filter、Weight 等。由于始终使用( ,)函数完成卷积运算,卷积运算其实已经实现了权值共享的思想。
我们来小结 2D 离散卷积运算流程:每次通过移动卷积核,并与图片对应位置处的感受野像素相乘累加,得到此位置的输出值。卷积核即是行、列为大小的权值矩阵,对应到特征图上大小为的窗口即为感受野,感受野与权值矩阵相乘累加,得到此位置的输出值。通过权值共享,我们从左上方逐步向右、向下移动卷积核,提取每个位置上的像素特征,直至最右下方,完成卷积运算。可以看出,两种理解方式殊途同归,从数学角度理解,卷积神经网络即是完成了 2D 函数的离散卷积运算;从局部相关与权值共享角度理解,也能得到一样的效果。通过这两种角度,我们既能直观理解卷积神经网络的计算流程,又能严谨地从数学角度进行推导。正是基于卷积运算,卷积神经网络才能如此命名。
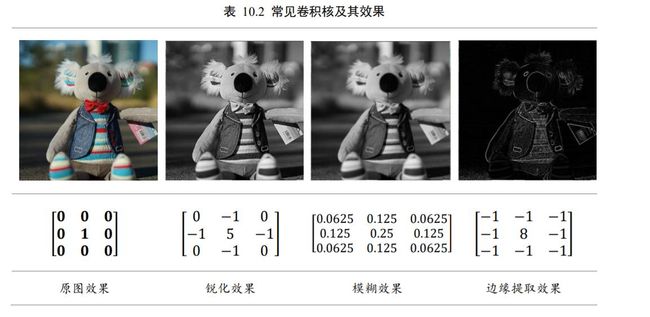
在计算机视觉领域,2D 卷积运算能够提取数据的有用特征,通过特定的卷积核与输入图片进行卷积运算,获得不同特征的输出图片,如下表 10.2 所示,列举了一些常见的卷积核及其效果样片。
10.2 卷积神经网络
卷积神经网络通过充分利用局部相关性和权值共享的思想,大大地减少了网络的参数量,从而提高训练效率,更容易实现超大规模的深层网络。2012 年,加拿大多伦多大学Alex Krizhevsky 将深层卷积神经网络应用在大规模图片识别挑战赛 ILSVRC-2012 上,在ImageNet 数据集上取得了 15.3% 的 Top-5 错误率,排名第一,相对于第二名在 Top-5 错误率上降低了 10.9%,这一巨大突破引起了业界强烈关注,卷积神经网络迅速成为计算机视觉领域的新宠,随后在一系列的任务中,基于卷积神经网络的形形色色的模型相继被提出,并在原有的性能上取得了巨大提升。
现在我们来介绍卷积神经网络层的具体计算流程。以 2D 图片数据为例,卷积层接受高、宽分别为ℎ、,通道数为 c i n c_{in} cin的输入特征图,在 c o u t c_{out} cout个高、宽都为,通道数为 c i n c_{in} cin的卷积核作用下,生成高、宽分别为ℎ′、′,通道数为 c o u t c_{out} cout的特征图输出。需要注意的是,卷积核的高宽可以不等,为了简化讨论,这里仅讨论高宽都为的情况,之后可以轻松推广到高、宽不等的情况。
我们首先从单通道输入、单卷积核的情况开始讨论,然后推广至多通道输入、单卷积核,最后讨论最常用,也是最复杂的多通道输入、多个卷积核的卷积层实现。
10.2.1 单通道输入和单卷积核
首先讨论单通道输入 c i n c_{in} cin=1 ,如灰度图片只有灰度值一个通道,单个卷积核 c o u t c_{out} cout=1的情况。以输入为 5×5 的矩阵,卷积核为3 × 3的矩阵为例,如下图 10.12 所示。与卷积核同大小的感受野(输入上方的绿色方框)首先移动至输入最左上方,选中输入上3 × 3的感受野元素,与卷积核(图片中间3 × 3方框)对应元素相乘:

⨀符号表示哈达马积(Hadamard Product),即矩阵的对应元素相乘,它与矩阵相乘符号@是矩阵的二种最为常见的运算形式。运算后得到3 × 3的矩阵,这 9 个数值全部相加:
− 1 − 1 + 0 − 1 + 2 + 6 + 0 − 2 + 4 = 7 -1-1+0-1+2+6+0-2+4=7 −1−1+0−1+2+6+0−2+4=7
得到标量 7,写入输出矩阵第一行、第一列的位置,如图 10.12 所示。

完成第一个感受野区域的特征提取后,感受野窗口向右移动一个步长单位(Strides,记为,默认为 1),选中图 10.13 中绿色方框中的 9 个感受野元素,按照同样的计算方法,与卷积核对应元素相乘累加,得到输出 10,写入第一行、第二列位置。

感受野窗口再次向右移动一个步长单位,选中图 10.14 中绿色方框中的元素,并与卷积核相乘累加,得到输出 3,并写入输出的第一行、第三列位置,如图 10.14 所示。

此时感受野已经移动至输入的有效像素的最右边,无法向右边继续移动(在不填充无效元素的情况下),因此感受野窗口向下移动一个步长单位( = 1),并回到当前行的行首位置,继续选中新的感受野元素区域,如图 10.15 所示,与卷积核运算得到输出-1。此时的感受野由于经过向下移动一个步长单位,因此输出值-1 写入第二行、第一列位置。
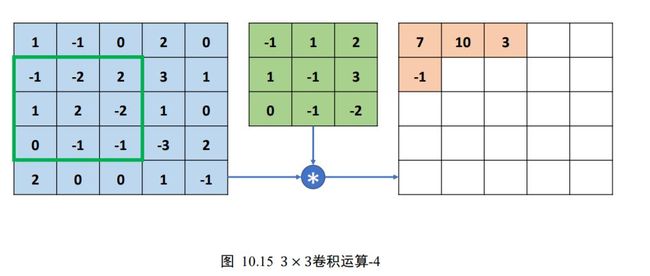
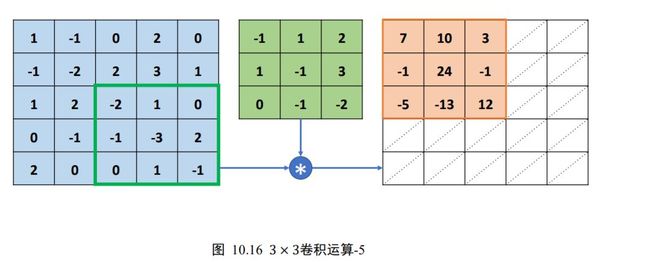
按照上述方法,每次感受野向右移动 = 1个步长单位,若超出输入边界,则向下移动 =1 个步长单位,并回到行首,直到感受野移动至最右边、最下方位置,如下图 10.16 所示。
每次选中的感受野区域元素,和卷积核对应元素相乘累加,并写入输出的对应位置。最终输出我们得到一个3 × 3的矩阵,比输入 5×5 略小,这是因为感受野不能超出元素边界的缘故。可以观察到,卷积运算的输出矩阵大小由卷积核的大小,输入的高宽ℎ/,移动步长,是否填充等因素共同决定。这里为了演示计算过程,预绘制了一个与输入等大小的网格,并不表示输出高宽为 5×5 ,这里的实际输出高宽只有3 × 3。
现在我们已经介绍了单通道输入、单个卷积核的运算流程。实际的神经网络输入通道数量往往较多,接下来我们将学习多通道输入、单个卷积核的卷积运算方法。
10.2.2 多通道输入和单卷积核
多通道输入的卷积层更为常见,比如彩色的图片包含了 R/G/B 三个通道,每个通道上面的像素值表示 R/G/B 色彩的强度。
下面我们以 3 通道输入、单个卷积核为例,将单通道输入的卷积运算方法推广到多通道的情况。如图 10.17 中所示,每行的最左边 5×5 的矩阵表示输入的 1~3 通道,第 2 列的3 × 3矩阵分别表示卷积核的 1~3 通道,第 3 列的矩阵表示当前通道上运算结果的中间矩阵,最右边一个矩阵表示卷积层运算的最终输出。
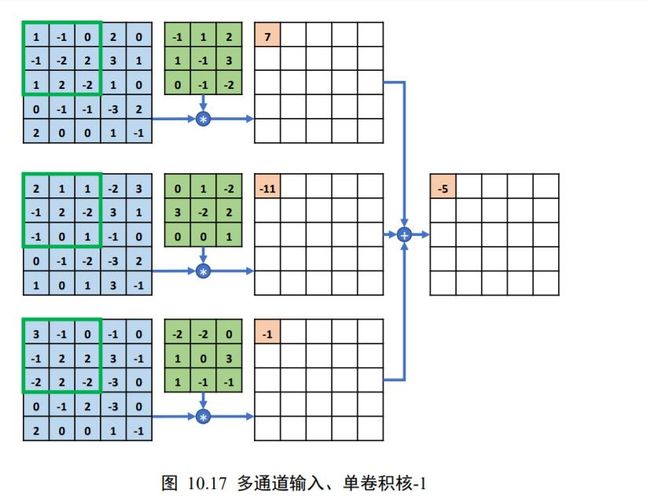
在多通道输入的情况下,卷积核的通道数需要和输入的通道数量相匹配,卷积核的第个通道和的第个通道运算,得到第个中间矩阵,此时可以视为单通道输入与单卷积核的情况,所有通道的中间矩阵对应元素再次相加,作为最终输出。
具体的计算流程如下:在初始状态,如图 10.17 所示,每个通道上面的感受野窗口同步落在对应通道上面的最左边、最上方位置,每个通道上感受野区域元素与卷积核对应通道上面的矩阵相乘累加,分别得到三个通道上面的输出 7、-11、-1 的中间变量,这些中间变量相加得到输出-5,写入对应位置。
随后,感受野窗口同步在的每个通道上向右移动 = 1个步长单位,此时感受野区域元素如下图 10.18 所示,每个通道上面的感受野与卷积核对应通道上面的矩阵相乘累加,得到中间变量 10、20、20,全部相加得到输出 50,写入第一行、第二列元素位置。
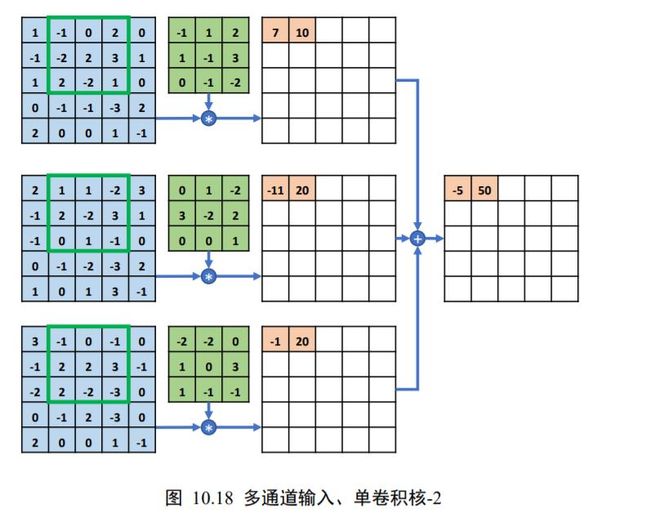
以此方式同步移动感受野窗口,直至最右边、最下方位置,此时全部完成输入和卷积核的卷积运算,得到3 × 3的输出矩阵,如图 10.19 所示。

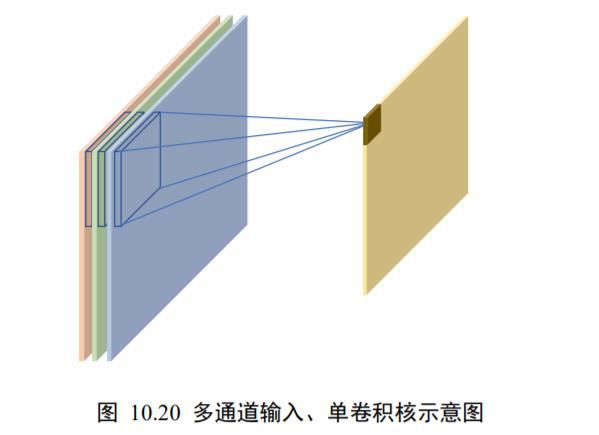
整个的计算示意图如下图 10.20 所示,输入的每个通道处的感受野均与卷积核的对应通道相乘累加,得到与通道数量相等的中间变量,这些中间变量全部相加即得到当前位置的输出值。输入通道的通道数量决定了卷积核的通道数。一个卷积核只能得到一个输出矩阵,无论输入的通道数量。
一般来说,一个卷积核只能完成某种逻辑的特征提取,当需要同时提取多种逻辑特征时,可以通过增加多个卷积核来得到多种特征,提高神经网络的表达能力,这就是多通道输入、多卷积核的情况。
10.2.3 多通道输入、多卷积核
多通道输入、多卷积核是卷积神经网络中最为常见的形式,前面我们已经介绍了单卷积核的运算过程,每个卷积核和输入做卷积运算,得到一个输出矩阵。当出现多卷积核时,第 ( ∈[1, ] ,为卷积核个数)个卷积核与输入运算得到第个输出矩阵(也称为输出张量的通道),最后全部的输出矩阵在通道维度上进行拼接(Stack 操作,创建输出通道数的新维度),产生输出张量,包含了个通道数。
以 3 通道输入、2 个卷积核的卷积层为例。第一个卷积核与输入运算得到输出的第一个通道,第二个卷积核与输入运算得到输出的第二个通道,如下图 10.21 所示,输出的两个通道拼接在一起形成了最终输出。每个卷积核的大小、步长、填充设定等都是统一设置,这样才能保证输出的每个通道大小一致,从而满足拼接的条件。

10.2.4 步长
在卷积运算中,如何控制感受野布置的密度呢?对于信息密度较大的输入,如物体数量很多的图片,为了尽可能的少漏掉有用信息,在网络设计的时候希望能够较密集地布置感受野窗口;对于信息密度较小的输入,比如全是海洋的图片,可以适量的减少感受野窗口的数量。感受野密度的控制手段一般是通过移动步长(Strides)实现的。
步长是指感受野窗口每次移动的长度单位,对于 2D 输入来说,分为沿(向右)方向和(向下)方向的移动长度。为了简化讨论,这里只考虑/方向移动步长相同的情况,这也是神经网络中最常见的设定。
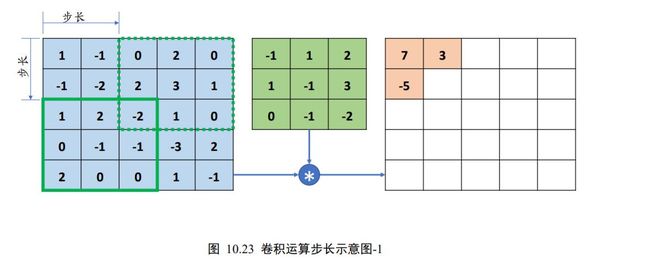
如下图 10.22 所示,绿色实线代表的感受野窗口的位置是当前位置,绿色虚线代表是上一次感受野所在位置,从上一次位置移动到当前位置的移动长度即是步长的定义。图 10.22 中感受野沿方向的步长为 2,表达为步长 = 2。
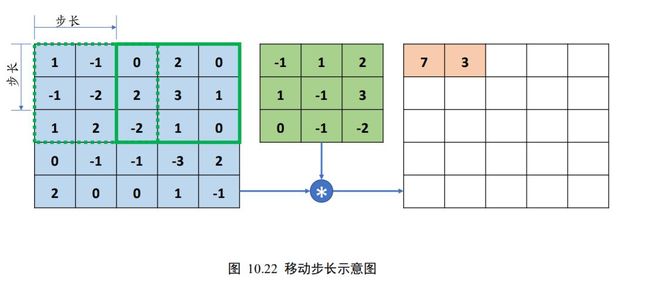
当感受野移动至输入右边的边界时,感受野向下移动一个步长 = 2,并回到行首。如下图 10.23 所示,感受野向下移动 2 个单位,并回到行首位置,进行相乘累加运算。
循环往复移动,直至达到最下方、最右边边缘位置,如图 10.24 所示,最终卷积层输出的高宽只有2 × 2。对比前面 =1 的情形,输出高宽由3 × 3降低为2 × 2,感受野的数量减少为仅 4 个。
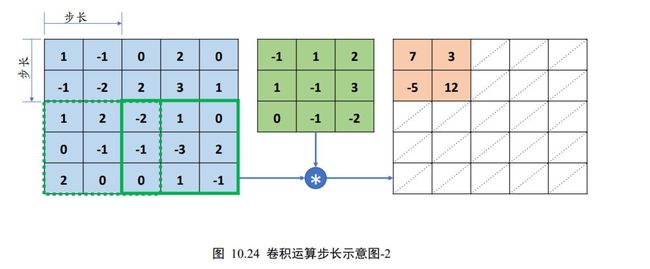
可以看到,通过设定步长,可以有效地控制信息密度的提取。当步长设计的较小时,感受野以较小幅度移动窗口,有利于提取到更多的特征信息,输出张量的尺寸也更大;当步长设计的较大时,感受野以较大幅度移动窗口,有利于减少计算代价,过滤冗余信息,输出张量的尺寸也更小。
10.2.5 填充
经过卷积运算后的输出的高宽一般会小于输入的高宽,即使是步长 =1 时,输出的高宽也会略小于输入高宽。
在网络模型设计时,有时希望输出的高宽能够与输入的高宽相同,从而方便网络参数的设计、残差连接等。
为了让输出的高宽能够与输入的相等,一般通过在原输入的高和宽维度上面进行填充(Padding)若干无效元素操作,得到增大的输入′。通过精心设计填充单元的数量,在′上面进行卷积运算得到输出的高宽可以和原输入相等,甚至更大。
如下图 10.25 所示,在高/行方向的上(Top)、下(Bottom)方向,宽/列方向的左(Left)、右(Right)均可以进行不定数量的填充操作,填充的数值一般默认为 0,也可以填充自定义的数据。图 10.25 中上、下方向各填充 1 行,左、右方向各填充 2 列,得到新的输入′。

那么添加填充后的卷积层怎么运算呢?同样的方法,仅仅是把参与运算的输入从换成了填充后得到的新张量′。如下图 10.26 所示,感受野的初始位置在填充后的′的左上方,完成相乘累加运算,得到输出 1,写入输出张量的对应位置。

移动步长 = 1个单位,重复运算逻辑,得到输出 0,如图 10.27 所示。

循环往复,最终得到 × 的输出张量,如图 10.28 所示。

通过精心设计的 Padding 方案,即上下左右各填充一个单位,记为 =1 ,我们可以得到输出和输入的高、宽相等的结果;在不加 Padding 的情况下,如下图 10.29 所示,只能得到3 × 3的输出,略小于输入。

卷积神经层的输出尺寸 [ b , h ′ , W ′ , C O u t ] \left[b, h^{\prime}, W^{\prime}, C_{O u t}\right] [b,h′,W′,COut]由卷积核的数量 C o u t C_{out} Cout,卷积核的大小,步长,填充数(只考虑上下填充数量 p h p_{h} ph相同,左右填充数量 p w p_{w} pw相同的情况)以及输入的高宽ℎ/共同决定,它们之间的数学关系可以表达为:
h ′ = ⌊ h + 2 ⋅ p h − k s ⌋ + 1 h^{\prime}=\left\lfloor\frac{h+2 \cdot p_{h}-k}{s}\right\rfloor+1 h′=⌊sh+2⋅ph−k⌋+1
w ′ = ⌊ w + 2 ⋅ p w − k s ⌋ + 1 w^{\prime}=\left\lfloor\frac{w+2 \cdot p_{w}-k}{s}\right\rfloor+1 w′=⌊sw+2⋅pw−k⌋+1
其中 p h p_{h} ph、 p w p_{w} pw分别表示高、宽方向的填充数量,⌊∙⌋表示向下取整。以上面的例子为例,ℎ = = 5, = 3, p h p_{h} ph= p w p_{w} pw=1 , =1 ,输出的高宽分别为:
h ′ = ⌊ 5 + 2 ∗ 1 − 3 1 ⌋ + 1 = ⌊ 4 ⌋ + 1 = 5 w ′ = ⌊ 5 + 2 ∗ 1 − 3 1 ⌋ + 1 = ⌊ 4 ⌋ + 1 = 5 \begin{array}{l} h^{\prime}=\left\lfloor\frac{5+2 * 1-3}{1}\right\rfloor+1=\lfloor 4\rfloor+1=5 \\ w^{\prime}=\left\lfloor\frac{5+2 * 1-3}{1}\right\rfloor+1=\lfloor 4\rfloor+1=5 \end{array} h′=⌊15+2∗1−3⌋+1=⌊4⌋+1=5w′=⌊15+2∗1−3⌋+1=⌊4⌋+1=5
在 TensorFlow 中,在 =1 时,如果希望输出和输入高、宽相等,只需要简单地设置参数 padding=”SAME”即可使 TensorFlow 自动计算 padding 数量,非常方便。
10.3 卷积层实现
在 TensorFlow 中,既可以通过自定义权值的底层实现方式搭建神经网络,也可以直接调用现成的卷积层类的高层方式快速搭建复杂网络。我们主要以 2D 卷积为例,介绍如何实现卷积神经网络层。
10.3.1 自定义权值
在 TensorFlow 中,通过tf.nn.conv2d函数可以方便地实现 2D 卷积运算。tf.nn.conv2d基于输入: [ b , h , w , c i n ] \left[b, h, w, c_{i n}\right] [b,h,w,cin]和卷积核: [ k , k , c i n , c o u t ] \left[k, k, c_{in}, c_{out}\right] [k,k,cin,cout]进行卷积运算,得到输出 [ b , h ′ , w ′ , c o u t ] \left[b, h^{\prime}, w^{\prime}, c_{o u t}\right] [b,h′,w′,cout],其中 c i n c_{in} cin表示输入通道数, c o u t c_{out} cout表示卷积核的数量,也是输出特征图的通道数。例如:
x=tf.random.normal([2,5,5,3])#模拟输入,3通道,高宽为5
#需要根据[k,k,cin,cout]格式创建张量W,4个3×3大小卷积核
w=tf.random.normal([3,3,3,4])
#步长为1,padding为0
out=tf.nn.conv2d(x,w,strides=1,padding=[[0,0],[0,0],[0,0],[0,0]])
#输出张量的shape
print(out.shape)
(2, 3, 3, 4)
其中 padding 参数的设置格式为:
padding=[[0,0],[上,下],[左,右],[0,0]]
例如,上下左右各填充一个单位,则 padding 参数设置为 ,实现如下:
x=tf.random.normal([2,5,5,3])#模拟输入,3通道,高宽为5
#需要根据[k,k,cin,cout]格式创建张量W,4个3×3大小卷积核
w=tf.random.normal([3,3,3,4])
#步长为1,padding为0
out=tf.nn.conv2d(x,w,strides=1,padding=[[0,0],[1,1],[1,1],[0,0]])
#输出张量的shape
print(out.shape)
TensorShape([2, 5, 5, 4])
特别地,通过设置参数 padding='SAME'、strides=1可以直接得到输入、输出同大小的卷积层,其中 padding 的具体数量由 TensorFlow 自动计算并完成填充操作。例如:
x=tf.random.normal([2,5,5,3])#模拟输入,3通道,高宽为5
#需要根据[k,k,cin,cout]格式创建张量W,4个3×3大小卷积核
w=tf.random.normal([3,3,3,4])
#步长为,padding设置为输出、输入同大小
# 需要注意的是,padding=same只有在strides=1时才是同大小
out=tf.nn.conv2d(x,w,strides=1,padding='SAME')
#输出张量的shape
print(out.shape)
Out[3]: TensorShape([2, 5, 5, 4])
当 >1 时,设置 padding='SAME'将使得输出高、宽将成 1 S \frac{1}{S} S1倍地减少。例如:
x=tf.random.normal([2,5,5,3])#模拟输入,3通道,高宽为5
#需要根据[k,k,cin,cout]格式创建张量W,4个3×3大小卷积核
w=tf.random.normal([3,3,3,4])
# 高宽先padding成可以整除3的最小整数6,然后6按3倍减少,得到2×2
out=tf.nn.conv2d(x,w,strides=3,padding='SAME')
#输出张量的shape
print(out.shape)
TensorShape([2, 2, 2, 4])
卷积神经网络层与全连接层一样,可以设置网络带偏置向量。tf.nn.conv2d 函数是没有实现偏置向量计算的,添加偏置只需要手动累加偏置张量即可。例如:
# 根据[cout]格式创建偏置向量
b = tf.zeros([4])
# 在卷积输出上叠加偏置向量,它会自动 broadcasting 为[b,h',w',cout]
out = out + b
out.shape
TensorShape([2, 2, 2, 4])
10.3.2 卷积层类
通过卷积层类 layers.Conv2D 可以不需要手动定义卷积核和偏置张量,直接调用类实例即可完成卷积层的前向计算,实现更加高层和快捷。
在TensorFlow中,API 的命名有一定的规律,首字母大写的对象一般表示类,全部小写的一般表示函数,如 layers.Conv2D表示卷积层类,nn.conv2d表示卷积运算函数。使用类方式会(在创建类时或 build 时)自动创建需要的权值张量和偏置向量等,用户不需要记忆卷积核张量的定义格式,因此使用起来更简单方便,但是灵活性也略低。
函数方式的接口需要自行定义权值和偏置等,更加灵活和底层。
在新建卷积层类时,只需要指定卷积核数量参数 filters,卷积核大小 kernel_size,步长strides,填充 padding 等即可。如下创建了 4 个3 × 3大小的卷积核的卷积层,步长为 1,padding 方案为’SAME’:
layer = layers.Conv2D(4,kernel_size=3,strides=1,padding='SAME')
如果卷积核高宽不等,步长行列方向不等,此时需要将 kernel_size 参数设计为 tuple格式( k h k_{h} kh, k w k_{w} kw),strides 参数设计为( s h s_{h} sh , s w s_{w} sw)。如下创建 4 个3 ×4 大小的卷积核,竖直方向移动步长 s h s_{h} sh= 2,水平方向移动步长 s w s_{w} sw=1 :
layer = layers.Conv2D(4,kernel_size=(3,4),strides=(2,1),padding='SAME')
创建完成后,通过调用实例(的__call__方法)即可完成前向计算,例如:
#创建卷积层类
x=tf.random.normal([2,5,5,3])
layer=layers.Conv2D(4,kernel_size=3,strides=1,padding='SAME')
out=layer(x)#前向计算
print(out.shape)
TensorShape([2, 5, 5, 4])
在类 Conv2D 中,保存了卷积核张量和偏置,可以通过类成员 trainable_variables直接返回和的列表。例如:
# 返回所有待优化张量列表
print(layer.trainable_variables)
[<tf.Variable 'conv2d/kernel:0' shape=(3, 3, 3, 4) dtype=float32, numpy=
array([[[[ 0.13485974, -0.22861657, 0.01000655, 0.11988598],
[ 0.12811887, 0.20501086, -0.29820845, -0.19579397],
[ 0.00858489, -0.24469738, -0.08591779, -0.27885547]], …
<tf.Variable 'conv2d/bias:0' shape=(4,) dtype=float32, numpy=array([0., 0.,
0., 0.], dtype=float32)>]
通过调用 layer.trainable_variables 可以返回 Conv2D 类维护的和张量,这个类成员在获取网络层的待优化变量时非常有用。也可以直接调用类实例 layer.kernel、layer.bias名访问和张量。
10.4 LeNet-5 实战
1990 年代,Yann LeCun 等人提出了用于手写数字和机器打印字符图片识别的神经网络,被命名为 LeNet-5。LeNet-5 的提出,使得卷积神经网络在当时能够成功被商用,广泛应用在邮政编码、支票号码识别等任务中。
下图 10.30 是 LeNet-5 的网络结构图,它接受32 × 32大小的数字、字符图片,经过第一个卷积层得到 [b,28,28,6] 形状的张量,经过一个向下采样层,张量尺寸缩小到[b,14,14,6] ,经过第二个卷积层,得到[b,10,10,16]形状的张量,同样经过下采样层,张量尺寸缩小到[b,5,5,16] ,在进入全连接层之前,先将张量打成[b,400] 的张量,送入输出节点数分别为 120、84 的 2 个全连接层,得到[b,84]的张量,最后通过 Gaussian connections 层。

现在看来,LeNet-5 网络层数较少(2 个卷积层和 2 个全连接层),参数量较少,计算代价较低,尤其在现代 GPU 的加持下,数分钟即可训练好 LeNet-5 网络。
我们在 LeNet-5 的基础上进行了少许调整,使得它更容易在现代深度学习框架上实现。首先我们将输入形状由32 × 32调整为28 × 28,然后将 2 个下采样层实现为最大池化层(降低特征图的高、宽,后续会介绍),最后利用全连接层替换掉 Gaussian connections层。下文统一称修改的网络也为 LeNet-5 网络。网络结构图如图 10.31 所示。

我们基于 MNIST 手写数字图片数据集训练 LeNet-5 网络,并测试其最终准确度。
import tensorflow as tf
# 导入误差计算,优化器模块
from tensorflow.keras import Sequential, layers, losses, datasets, optimizers
# 获取 GPU 设备列表
gpus = tf.config.experimental.list_physical_devices('GPU')
if gpus:
try:
# 设置 GPU 为增长式占用
for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu, True)
except RuntimeError as e:
# 打印异常
print(e)
加载数据集以及对数据进行预处理。
def preprocess(x, y):
# [b, 28, 28], [b]
print(x.shape, y.shape)
x = tf.cast(x, dtype=tf.float32) / 255.
x = tf.reshape(x, [-1, 28, 28])
y = tf.cast(y, dtype=tf.int64)
return x, y
def load_dataset():
(x, y), (x_test, y_test) = datasets.mnist.load_data()
batchsz = 128
train_db = tf.data.Dataset.from_tensor_slices((x, y))
train_db = train_db.shuffle(1000).batch(batchsz).map(preprocess)
test_db = tf.data.Dataset.from_tensor_slices((x_test, y_test))
test_db = test_db.shuffle(1000).batch(batchsz).map(preprocess)
return train_db, test_db
首先通过 Sequential 容器创建 LeNet-5,代码如下:
from tensorflow.keras import Sequential
network=Sequential([
layers.Conv2D(6,kernel_size=3,strides=1),#第一个卷积层,6个3*3卷积核
layers.MaxPooling2D(pool_size=2,strides=2),# 宽和高各减半的池化层
layers.ReLU(),#激活函数
layers.Conv2D(16,kernel_size=3,strides=1),#第二个卷积层,16个3*3卷积核
layers.MaxPooling2D(pool_size=2,strides=2),#宽高各减半的池化层
layers.ReLU(),#激活函数
layers.Flatten(),#打平层,方便全连接层处理
layers.Dense(120,activation='relu'),#全连接层,120个节点
layers.Dense(84,activation='relu'),#全连接层,84节点
layers.Dense(10)#全连接层,10个节点
])
#build一次网络模型,给输入X的形状,其中4为随意给的batchsz
network.build(input_shape=(4,28,28,1))
#统计网络信息
print(network.summary())
Model: "sequential_1"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d_1 (Conv2D) (4, 26, 26, 6) 60
_________________________________________________________________
max_pooling2d (MaxPooling2D) (4, 13, 13, 6) 0
_________________________________________________________________
re_lu (ReLU) (4, 13, 13, 6) 0
_________________________________________________________________
conv2d_2 (Conv2D) (4, 11, 11, 16) 880
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (4, 5, 5, 16) 0
_________________________________________________________________
re_lu_1 (ReLU) (4, 5, 5, 16) 0
_________________________________________________________________
flatten (Flatten) (4, 400) 0
_________________________________________________________________
dense_4 (Dense) (4, 120) 48120
_________________________________________________________________
dense_5 (Dense) (4, 84) 10164
_________________________________________________________________
dense_6 (Dense) (4, 10) 850
=================================================================
Total params: 60,074
Trainable params: 60,074
Non-trainable params: 0
通过summary()函数统计出每层的参数量,打印出网络结构信息和每层参数量详情,如表
10.3 所示,我们可以与全连接网络的参数量表 10.1 进行比较。

可以看到,卷积层的参数量非常少,主要的参数量集中在全连接层。由于卷积层将输入特征维度降低很多,从而使得全连接层的参数量不至于过大,整个模型的参数量约 60K,而表 10.1 中的全连接网络参数量达到了 34 万个,因此通过卷积神经网络可以显著降低网络参数量,同时增加网络深度。
在训练阶段,首先将数据集中 shape 为[b,28,28]的输入增加一个维度,调整 shape 为[b,28,28,1]送入模型进行前向计算,得到输出张量 output,shape 为[b,10] 。我们新建交叉熵损失函数类(没错,损失函数也能使用类方式)用于处理分类任务,通过设定from_logits=True 标志位将 softmax 激活函数实现在损失函数中,不需要手动添加损失函数,提升数值计算稳定性。代码如下:
#导入误差计算,优化器模块
from tensorflow.keras import losses,optimizers
#创建损失函数的类,在实际计算时直接调用类实例即可
criteon=losses.CategoricalCrossentropy(from_logits=True)
完整训练过程实现如下:
def train(train_db, network, criteon, optimizer, epoch_num):
for epoch in range(epoch_num):
correct, total, loss = 0, 0, 0
for step, (x, y) in enumerate(train_db):
# 构建梯度记录环境
with tf.GradientTape() as tape:
# 插入通道维度, =>[b,28,28,1]
x = tf.expand_dims(x, axis=3)
# 前向计算,获得 10 类别的概率分布, [b, 784] => [b, 10]
out = network(x)
pred = tf.argmax(out, axis=-1)
# 真实标签 one-hot 编码, [b] => [b, 10]
y_onehot = tf.one_hot(y, depth=10)
# 计算交叉熵损失函数,标量
loss += criteon(y_onehot, out)
# 统计预测正确数量
correct += float(tf.reduce_sum(tf.cast(tf.equal(pred, y), tf.float32)))
# 统计预测样本总数
total += x.shape[0]
# 自动计算梯度
grads = tape.gradient(loss, network.trainable_variables)
# 自动更新参数
optimizer.apply_gradients(zip(grads, network.trainable_variables))
print(epoch, 'loss=', float(loss), 'acc=', correct / total)
return network
获得损失值后,通过 TensorFlow 的梯度记录器 tf.GradientTape()来计算损失函数 loss 对网络参数 network.trainable_variables 之间的梯度,并通过 optimizer 对象自动更新网络权值参数。代码如下:
# 自动计算梯度
grads = tape.gradient(loss, network.trainable_variables)
# 自动更新参数
optimizer.apply_gradients(zip(grads, network.trainable_variables))
重复上述步骤若干次后即可完成训练工作。
在测试阶段,由于不需要记录梯度信息,代码一般不需要写在 with tf.GradientTape() as tape 环境中。前向计算得到的输出经过 softmax 函数后,代表了网络预测当前图片输入属于类别的概率(标签是|), ∈[0, 9] 。通过 argmax 函数选取概率最大的元素所在的索引,作为当前的预测类别,与真实标注比较,通过计算比较结果中间 True 的数量并求和来统计预测正确的样本的个数,最后除以总样本的个数,得出网络的测试准确度。代码如下:
def predict(test_db, network):
# 记录预测正确的数量,总样本数量
correct, total = 0, 0
for x, y in test_db: # 遍历所有训练集样本
# 插入通道维度, =>[b,28,28,1]
x = tf.expand_dims(x, axis=3)
# 前向计算,获得 10 类别的预测分布, [b, 784] => [b, 10]
out = network(x)
# 真实的流程时先经过 softmax,再 argmax
# 但是由于 softmax 不改变元素的大小相对关系,故省去
pred = tf.argmax(out, axis=-1)
y = tf.cast(y, tf.int64)
# 统计预测正确数量
correct += float(tf.reduce_sum(tf.cast(tf.equal(pred, y), tf.float32)))
# 统计预测样本总数
total += x.shape[0]
# 计算准确率
print('test acc:', correct / total)
在数据集上面循环训练 30 个 Epoch 后,网络的训练准确度达到了 98.1%,测试准确度也达到了 97.7%。对于非常简单的手写数字图片识别任务,古老的 LeNet-5 网络已经可以取得很好的效果,但是稍复杂一点的任务,比如彩色动物图片识别,LeNet-5 性能就会急剧下降。
接下来,我们总结一下上述所有的知识点。
import tensorflow as tf
# 导入误差计算,优化器模块
from tensorflow.keras import Sequential, layers, losses, datasets, optimizers
# 获取 GPU 设备列表
gpus = tf.config.experimental.list_physical_devices('GPU')
if gpus:
try:
# 设置 GPU 为增长式占用
for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu, True)
except RuntimeError as e:
# 打印异常
print(e)
def preprocess(x, y):
# [b, 28, 28], [b]
print(x.shape, y.shape)
x = tf.cast(x, dtype=tf.float32) / 255.
x = tf.reshape(x, [-1, 28, 28])
y = tf.cast(y, dtype=tf.int64)
return x, y
def load_dataset():
(x, y), (x_test, y_test) = datasets.mnist.load_data()
batchsz = 128
train_db = tf.data.Dataset.from_tensor_slices((x, y))
train_db = train_db.shuffle(1000).batch(batchsz).map(preprocess)
test_db = tf.data.Dataset.from_tensor_slices((x_test, y_test))
test_db = test_db.shuffle(1000).batch(batchsz).map(preprocess)
return train_db, test_db
def build_network():
network = Sequential([ # 网络容器
layers.Conv2D(6, kernel_size=3, strides=1), # 第一个卷积层, 6 个 3x3 卷积核
layers.MaxPooling2D(pool_size=2, strides=2), # 高宽各减半的池化层
layers.ReLU(), # 激活函数
layers.Conv2D(16, kernel_size=3, strides=1), # 第二个卷积层, 16 个 3x3 卷积核
layers.MaxPooling2D(pool_size=2, strides=2), # 高宽各减半的池化层
layers.ReLU(), # 激活函数
layers.Flatten(), # 打平层,方便全连接层处理
layers.Dense(120, activation='relu'), # 全连接层, 120 个节点
layers.Dense(84, activation='relu'), # 全连接层, 84 节点
layers.Dense(10) # 全连接层, 10 个节点
])
# build 一次网络模型,给输入 X 的形状,其中 4 为随意给的 batchsz
network.build(input_shape=(4, 28, 28, 1))
# 统计网络信息
network.summary()
return network
def train(train_db, network, criteon, optimizer, epoch_num):
for epoch in range(epoch_num):
correct, total, loss = 0, 0, 0
for step, (x, y) in enumerate(train_db):
# 构建梯度记录环境
with tf.GradientTape() as tape:
# 插入通道维度, =>[b,28,28,1]
x = tf.expand_dims(x, axis=3)
# 前向计算,获得 10 类别的概率分布, [b, 784] => [b, 10]
out = network(x)
pred = tf.argmax(out, axis=-1)
# 真实标签 one-hot 编码, [b] => [b, 10]
y_onehot = tf.one_hot(y, depth=10)
# 计算交叉熵损失函数,标量
loss += criteon(y_onehot, out)
# 统计预测正确数量
correct += float(tf.reduce_sum(tf.cast(tf.equal(pred, y), tf.float32)))
# 统计预测样本总数
total += x.shape[0]
# 自动计算梯度
grads = tape.gradient(loss, network.trainable_variables)
# 自动更新参数
optimizer.apply_gradients(zip(grads, network.trainable_variables))
print(epoch, 'loss=', float(loss), 'acc=', correct / total)
return network
def predict(test_db, network):
# 记录预测正确的数量,总样本数量
correct, total = 0, 0
for x, y in test_db: # 遍历所有训练集样本
# 插入通道维度, =>[b,28,28,1]
x = tf.expand_dims(x, axis=3)
# 前向计算,获得 10 类别的预测分布, [b, 784] => [b, 10]
out = network(x)
# 真实的流程时先经过 softmax,再 argmax
# 但是由于 softmax 不改变元素的大小相对关系,故省去
pred = tf.argmax(out, axis=-1)
y = tf.cast(y, tf.int64)
# 统计预测正确数量
correct += float(tf.reduce_sum(tf.cast(tf.equal(pred, y), tf.float32)))
# 统计预测样本总数
total += x.shape[0]
# 计算准确率
print('test acc:', correct / total)
def main():
epoch_num = 30
train_db, test_db = load_dataset()
network = build_network()
# 创建损失函数的类,在实际计算时直接调用类实例即可
criteon = losses.CategoricalCrossentropy(from_logits=True)
optimizer = optimizers.RMSprop(0.001)
network = train(train_db, network, criteon, optimizer, epoch_num)
predict(test_db, network)
if __name__ == '__main__':
main()
输出结果如下,可见训练效果还不错。
(None, 28, 28) (None,)
(None, 28, 28) (None,)
Model: "sequential_4"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d_8 (Conv2D) multiple 60
_________________________________________________________________
max_pooling2d_8 (MaxPooling2 multiple 0
_________________________________________________________________
re_lu_8 (ReLU) multiple 0
_________________________________________________________________
conv2d_9 (Conv2D) multiple 880
_________________________________________________________________
max_pooling2d_9 (MaxPooling2 multiple 0
_________________________________________________________________
re_lu_9 (ReLU) multiple 0
_________________________________________________________________
flatten_4 (Flatten) multiple 0
_________________________________________________________________
dense_12 (Dense) multiple 48120
_________________________________________________________________
dense_13 (Dense) multiple 10164
_________________________________________________________________
dense_14 (Dense) multiple 850
=================================================================
Total params: 60,074
Trainable params: 60,074
Non-trainable params: 0
_________________________________________________________________
0 loss= 135.04367065429688 acc= 0.91455
1 loss= 40.35447692871094 acc= 0.9736333333333334
2 loss= 28.032947540283203 acc= 0.9815166666666667
3 loss= 21.78510093688965 acc= 0.9854833333333334
4 loss= 17.67403221130371 acc= 0.9877666666666667
5 loss= 14.373819351196289 acc= 0.9902333333333333
6 loss= 11.992131233215332 acc= 0.9917166666666667
7 loss= 10.650928497314453 acc= 0.9926333333333334
8 loss= 8.893635749816895 acc= 0.99365
9 loss= 7.410651206970215 acc= 0.9949666666666667
10 loss= 6.5429840087890625 acc= 0.9955
11 loss= 5.767464637756348 acc= 0.9957833333333334
12 loss= 5.1342244148254395 acc= 0.9964833333333334
13 loss= 4.76762056350708 acc= 0.99665
14 loss= 4.071495056152344 acc= 0.9971666666666666
15 loss= 3.3102405071258545 acc= 0.99785
16 loss= 3.527087450027466 acc= 0.9975333333333334
17 loss= 2.926004409790039 acc= 0.99795
18 loss= 2.8832032680511475 acc= 0.99815
19 loss= 2.596499443054199 acc= 0.99825
20 loss= 2.322714328765869 acc= 0.9984166666666666
21 loss= 2.272839069366455 acc= 0.9983833333333333
22 loss= 2.3042337894439697 acc= 0.99825
23 loss= 2.036952018737793 acc= 0.9984666666666666
24 loss= 1.6261500120162964 acc= 0.99885
25 loss= 1.768705129623413 acc= 0.9987833333333334
26 loss= 2.0271694660186768 acc= 0.99875
27 loss= 1.9127095937728882 acc= 0.9985
28 loss= 1.650101900100708 acc= 0.9988833333333333
29 loss= 1.422216534614563 acc= 0.9989666666666667
test acc: 0.9877
10.5 表示学习
我们已经介绍完卷积神经网络层的工作原理与实现方法,复杂的卷积神经网络模型也是基于卷积层的堆叠构成的。
在过去的一段时间内,研究人员发现网络层数越深,模型的表达能力越强,也就越有可能取得更好的性能。那么层层堆叠的卷积网络到底学到了什么特征,使得层数越深,网络的表达能力越强呢?
2014 年,Matthew D. Zeiler 等人尝试利用可视化的方法去理解卷积神经网络到底学到了什么。通过将每层的特征图利用“反卷积”网络(Deconvolutional Network)映射回输入图片,即可查看学到的特征分布,如图 10.32 所示。
可以观察到,第二层的特征对应到边、角、色彩等底层图像提取;第三层开始捕获到纹理这些中层特征;第四、五层呈现了物体的部分特征,如小狗的脸部、鸟类的脚部等高层特征。通过这些可视化的手段,我们可以一定程度上感受卷积神经网络的特征学习过程。


图片数据的识别过程一般认为也是表示学习(Representation Learning)的过程,从接受到的原始像素特征开始,逐渐提取边缘、角点等底层特征,再到纹理等中层特征,再到头部、物体部件等高层特征,最后的网络层基于这些学习到的抽象特征表示(Representation)做分类逻辑的学习。学习到的特征越高层、越准确,就越有利于分类器的分类,从而获得较好的性能。从表示学习的角度来理解,卷积神经网络通过层层堆叠来逐层提取特征,网络训练的过程可以看成特征的学习过程,基于学习到的高层抽象特征可以方便地进行分类任务。
应用表示学习的思想,训练好的卷积神经网络往往能够学习到较好的特征,这种特征的提取方法一般是通用的。比如在猫、狗任务上学习到头、脚、身躯等特征的表示,在其它动物上也能够一定程度上使用。基于这种思想,可以将在任务 A 上训练好的深层神经网络的前面数个特征提取层迁移到任务 B 上,只需要训练任务 B 的分类逻辑(表现为网络的最末数层),即可取得非常好的效果,这种方式是迁移学习的一种,从神经网络角度也称为网络微调(Fine-tuning)。
10.6 梯度传播
在完成手写数字图片识别实战后,我们对卷积神经网络的使用有了初步的了解。现在我们来解决一个关键问题,卷积层通过移动感受野的方式实现离散卷积操作,那么它的梯度传播是怎么进行的呢?
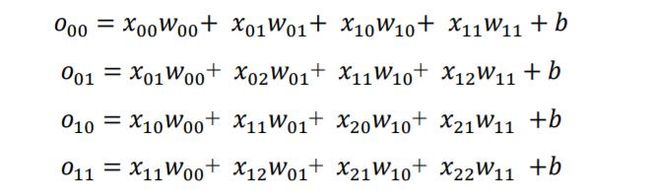
考虑一简单的情形,输入为3 × 3的单通道矩阵,与一个2 × 2的卷积核,进行卷积运算,输出结果打平后直接与虚构的标注计算误差,如图 10.33 所示。我们来讨论这种情况下的梯度更新方式。

首先推导出输出张量的表达形式:
以 W 00 W_{00} W00的梯度计算为例,通过链式法则分解:
∂ L ∂ w 00 = ∑ i ∈ { 00 , 01 , 10 , 11 } ∂ L ∂ o i ∂ o i ∂ w 00 \frac{\partial \mathcal{L}}{\partial w_{00}}=\sum_{i \in\{00,01,10,11\}} \frac{\partial \mathcal{L}}{\partial o_{i}} \frac{\partial o_{i}}{\partial w_{00}} ∂w00∂L=i∈{ 00,01,10,11}∑∂oi∂L∂w00∂oi
其中 ∂ L ∂ O i \frac{\partial \mathcal{L}}{\partial O_{i}} ∂Oi∂L可直接由误差函数推导出来,我们直接来考虑 ∂ O i ∂ w i \frac{\partial O_{i}}{\partial w_{i}} ∂wi∂Oi,例如:
∂ o 00 ∂ w 00 = ∂ ( x 00 w 00 + x 01 w 01 + x 10 w 10 + x 11 w 11 + b ) w 00 = x 00 \frac{\partial o_{00}}{\partial w_{00}}=\frac{\partial\left(x_{00} w_{00}+x_{01} w_{01}+x_{10} w_{10}+x_{11} w_{11}+b\right)}{w_{00}}=x_{00} ∂w00∂o00=w00∂(x00w00+x01w01+x10w10+x11w11+b)=x00
同样的方法,可以推导出:

可以观察到,通过循环移动感受野的方式并没有改变网络层可导性,同时梯度的推导也并不复杂,只是当网络层数增大以后,人工梯度推导将变得十分的繁琐。不过不需要担心,深度学习框架可以帮我们自动完成所有参数的梯度计算与更新,我们只需要设计好网络结构即可。
10.7 池化层
在卷积层中,可以通过调节步长参数实现特征图的高宽成倍缩小,从而降低了网络的参数量。实际上,除了通过设置步长,还有一种专门的网络层可以实现尺寸缩减功能,它就是这里要介绍的池化层(Pooling Layer)。
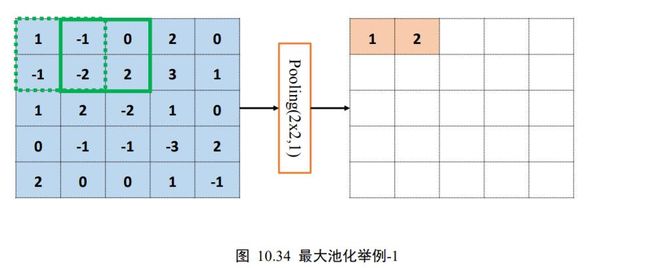
池化层同样基于局部相关性的思想,通过从局部相关的一组元素中进行采样或信息聚合,从而得到新的元素值。特别地,最大池化层(Max Pooling)从局部相关元素集中选取最大的一个元素值,平均池化层(Average Pooling)从局部相关元素集中计算平均值并返回。以 5×5 输入的最大池化层为例,考虑池化感受野窗口大小 = 2,步长 =1 的情况,如下图 10.34 所示。绿色虚线方框代表第一个感受野的位置,感受野元素集合为
{ 1 , − 1 , − 1 , − 2 } \{1,-1,-1,-2\} { 1,−1,−1,−2}
在最大池化采样的方法下,通过
x ′ = max ( { 1 , − 1 , − 1 , − 2 } ) = 1 x^{\prime}=\max (\{1,-1,-1,-2\})=1 x′=max({ 1,−1,−1,−2})=1
计算出当前位置的输出值为 1,并写入对应位置。
若采用的是平均池化操作,则此时的输出值应为
x ′ = avg ( { 1 , − 1 , − 1 , − 2 } ) = − 0.75 x^{\prime}=\operatorname{avg}(\{1,-1,-1,-2\})=-0.75 x′=avg({ 1,−1,−1,−2})=−0.75
计算完当前位置的感受野后,与卷积层的计算步骤类似,将感受野按着步长向右移动若干单位,此时的输出
x ′ = max ( − 1 , 0 , − 2 , 2 ) = 2 x^{\prime}=\max (-1,0,-2,2)=2 x′=max(−1,0,−2,2)=2
同样的方法,逐渐移动感受野窗口至最右边,计算出输出 x ′ = max ( 2 , 0 , 3 , 1 ) = 1 x^{\prime}=\max (2,0,3,1)=1 x′=max(2,0,3,1)=1,此时窗口已经到达输入边缘,按照卷积层同样的方式,感受野窗口向下移动一个步长,并回到行首,如图 10.35。
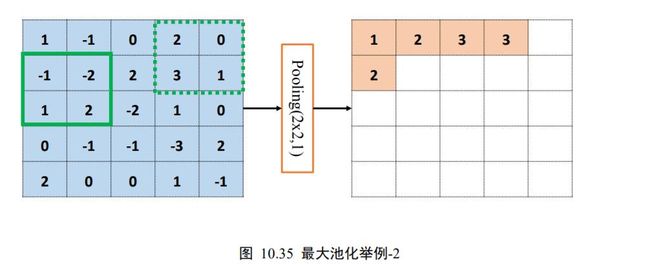
循环往复,直至最下方、最右边,获得最大池化层的输出,长宽为 4×4 ,略小于输入的高宽,如图 10.36。

由于池化层没有需要学习的参数,计算简单,并且可以有效减低特征图的尺寸,非常适合图片这种类型的数据,在计算机视觉相关任务中得到了广泛的应用。
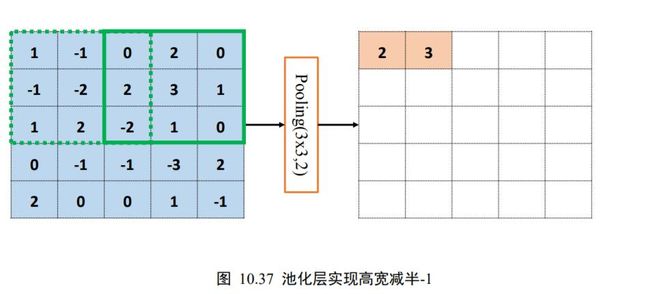
通过精心设计池化层感受野的高宽和步长参数,可以实现各种降维运算。比如,一种常用的池化层设定是感受野大小 = 2,步长 = 2,这样可以实现输出只有输入高宽一半的目的。如下图 10.37、图 10.38 所示,感受野 = 3,步长 = 2,输入高宽为 × ,输出高宽只有2 × 2。

10.8 BatchNorm 层
卷积神经网络的出现,网络参数量大大减低,使得几十层的深层网络成为可能。然而,在残差网络出现之前,网络的加深使得网络训练变得非常不稳定,甚至出现网络长时间不更新甚至不收敛的现象,同时网络对超参数比较敏感,超参数的微量扰动也会导致网络的训练轨迹完全改变。
2015 年,Google 研究人员 Sergey Ioffe 等提出了一种参数标准化(Normalize)的手段,并基于参数标准化设计了 Batch Nomalization(简写为 BatchNorm,或 BN)层。
BN 层的提出,使得网络的超参数的设定更加自由,比如更大的学习率、更随意的网络初始化等,同时网络的收敛速度更快,性能也更好。BN 层提出后便广泛地应用在各种深度网络模型上,卷积层、BN 层、ReLU 层、池化层一度成为网络模型的标配单元块,通过堆叠 ConvBN-ReLU-Pooling 方式往往可以获得不错的模型性能。
首先我们来探索,为什么需要对网络中的数据进行标准化操作?这个问题很难从理论层面解释透彻,即使是 BN 层的作者给出的解释也未必让所有人信服。与其纠结其缘由,不如通过具体问题来感受数据标准化后的好处。
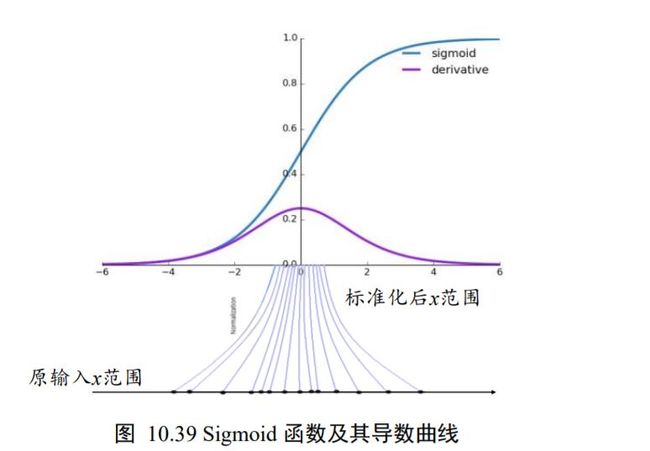
考虑 Sigmoid 激活函数和它的梯度分布,如下图 10.39 所示,Sigmoid 函数在 ∈[−2 ,2] 区间的导数在 [0.1, 0.25]区间分布;当 > 2 或 < −2时,Sigmoid 函数的导数变得很小,逼近于 0,从而容易出现梯度弥散现象。为了避免因为输入较大或者较小而导致Sigmoid 函数出现梯度弥散现象,将函数输入标准化映射到 0 附近的一段较小区间将变得非常重要,可以从图 10.39 看到,通过标准化重映射后,值被映射在 0 附近,此处的导数值不至于过小,从而不容易出现梯度弥散现象。这是使用标准化手段受益的一个例子。
我们再看另一个例子。考虑 2 个输入节点的线性模型,如图 10.40(a)所示:
L = a = x 1 w 1 + x 2 w 2 + b \mathcal{L}=a=x_{1} w_{1}+x_{2} w_{2}+b L=a=x1w1+x2w2+b
讨论如下 2 种输入分布下的优化问题:
❑ 输入1 ∈[1,10] ,2 ∈[1,10]
❑ 输入1 ∈[1,10] ,2 ∈[100,1000]
由于模型相对简单,可以绘制出 2 种1、2下,函数的损失等高线图,图 10.40(b)是1 ∈
1,10] 、2 ∈[100,1000]时的某条优化轨迹线示意,图 10.40©是1 ∈[1,10] 、2 ∈[1,10]时的某条优化轨迹线示意,图中的圆环中心即为全局极值点。

考虑到
当1、2输入分布相近时, ∂ L ∂ w 1 \frac{\partial \mathcal{L}}{\partial w_{1}} ∂w1∂L、 ∂ L ∂ w 2 \frac{\partial \mathcal{L}}{\partial w_{2}} ∂w2∂L偏导数值相当,函数的优化轨迹如图 10.40©所示;
当1、2输入分布差距较大时,比如1 ≪ 2,则
∂ L ∂ w 1 ≪ ∂ L ∂ w 2 \frac{\partial \mathcal{L}}{\partial w_{1}} \ll \frac{\partial \mathcal{L}}{\partial w_{2}} ∂w1∂L≪∂w2∂L
损失函数等势线在 w 2 w_{2} w2轴更加陡峭,某条可能的优化轨迹如图 10.40(b)所示。对比 2 条优化
线可以观察到,1、2分布相近时图 10.40©中收敛更加快速,优化轨迹更理想。
通过上述的 2 个例子,我们能够经验性归纳出:网络层输入分布相近,并且分布在较小范围内时(如 0 附近),更有利于函数的优化。那么如何保证输入的分布相近呢?数据标准化可以实现此目的,通过数据标准化操作可以将数据映射到̂:
x ^ = x − μ r σ r 2 + ϵ \hat{x}=\frac{x-\mu_{r}}{\sqrt{\sigma_{r}^{2}+\epsilon}} x^=σr2+ϵx−μr
其中 μ r \mu_{r} μr、2来自统计的所有数据的均值和方差,是为防止出现除 0 错误而设置的较小数字,如 1e − 8。
在基于 Batch 的训练阶段,如何获取每个网络层所有输入的统计数据 μ r \mu_{r} μr、 σ r 2 \sigma_{r}^{2} σr2?考虑 Batch 内部的均值 μ B \mu_{B} μB和方差 σ B 2 \sigma_{B}^{2} σB2
μ B = 1 m ∑ i = 1 m x i \mu_{B}=\frac{1}{m} \sum_{i=1}^{m} x_{i} μB=m1i=1∑mxi
σ B 2 = 1 m ∑ i = 1 m ( x i − μ B ) 2 \sigma_{B}^{2}=\frac{1}{m} \sum_{i=1}^{m}\left(x_{i}-\mu_{B}\right)^{2} σB2=m1i=1∑m(xi−μB)2
可以视为近似于 μ r \mu_{r} μr、 σ r 2 \sigma_{r}^{2} σr2,其中为 Batch 样本数。因此,在训练阶段,通过
x ^ train = x train − μ B σ B 2 + ϵ \hat{x}_{\text {train }}=\frac{x_{\text {train }}-\mu_{B}}{\sqrt{\sigma_{B}^{2}+\epsilon}} x^train =σB2+ϵxtrain −μB
标准化输入,并记录每个 Batch 的统计数据 μ B \mu_{B} μB和方差 σ B 2 \sigma_{B}^{2} σB2,用于统计真实的全局 μ r \mu_{r} μr和方差 σ r 2 \sigma_{r}^{2} σr2。
在测试阶段,根据记录的每个 Batch 的 μ B \mu_{B} μB和 σ B 2 \sigma_{B}^{2} σB2估计出所有训练数据的 μ r \mu_{r} μr和 σ r 2 \sigma_{r}^{2} σr2,按着
x ^ test = x test − μ r σ r 2 + ϵ \hat{x}_{\text {test }}=\frac{x_{\text {test }}-\mu_{r}}{\sqrt{\sigma_{r}^{2}+\epsilon}} x^test =σr2+ϵxtest −μr
将每层的输入标准化。
上述的标准化运算并没有引入额外的待优化变量, μ r \mu_{r} μr和 σ r 2 \sigma_{r}^{2} σr2, μ B \mu_{B} μB和 σ B 2 \sigma_{B}^{2} σB2均由统计得到,不需要参与梯度更新。实际上,为了提高 BN 层的表达能力,BN 层作者引入了“scale and shift”技巧,将̂变量再次映射变换:
x ~ = x ^ ⋅ γ + β \tilde{x}=\hat{x} \cdot \gamma+\beta x~=x^⋅γ+β
其中参数实现对标准化后的̂再次进行缩放,参数实现对标准化的̂进行平移,不同的是,、参数均由反向传播算法自动优化,实现网络层“按需”缩放平移数据的分布的目的。
下面我们来学习在 TensorFlow 中实现的 BN 层的方法。
10.8.1 前向传播
我们将 BN 层的输入记为,输出记为̃。分训练阶段和测试阶段来讨论前向传播过程。
训练阶段:首先计算当前 Batch 的 μ B \mu_{B} μB、 σ B 2 \sigma_{B}^{2} σB2,根据
x ~ train = x train − μ B σ B 2 + ϵ ⋅ γ + β \tilde{x}_{\text {train }}=\frac{x_{\text {train }}-\mu_{B}}{\sqrt{\sigma_{B}^{2}+\epsilon}} \cdot \gamma+\beta x~train =σB2+ϵxtrain −μB⋅γ+β
计算 BN 层的输出。
同时按照
μ r ← momentum ⋅ μ r + ( 1 − momentum ) ⋅ μ B σ r 2 ← momentum ⋅ σ r 2 + ( 1 − momentum ) ⋅ σ B 2 \begin{array}{c} \mu_{r} \leftarrow \text { momentum } \cdot \mu_{r}+(1-\text { momentum }) \cdot \mu_{B} \\ \sigma_{r}^{2} \leftarrow \text { momentum } \cdot \sigma_{r}^{2}+(1-\text { momentum }) \cdot \sigma_{B}^{2} \end{array} μr← momentum ⋅μr+(1− momentum )⋅μBσr2← momentum ⋅σr2+(1− momentum )⋅σB2
迭代更新全局训练数据的统计值 μ r \mu_{r} μr和 σ r 2 \sigma_{r}^{2} σr2,其中 momentum 是需要设置一个超参数,用于平衡 μ r \mu_{r} μr和 σ r 2 \sigma_{r}^{2} σr2的更新幅度:当momentum =0 时, μ r \mu_{r} μr和 σ r 2 \sigma_{r}^{2} σr2直接被设置为最新一个 Batch 的 μ B \mu_{B} μB和 σ B 2 \sigma_{B}^{2} σB2;当momentum =1时, μ r \mu_{r} μr和 σ r 2 \sigma_{r}^{2} σr2保持不变,忽略最新一个 Batch 的 μ B \mu_{B} μB和 σ B 2 \sigma_{B}^{2} σB2,在TensorFlow 中,momentum 默认设置为 0.99。
测试阶段:BN 层根据
x ~ test = x test − μ r σ r 2 + ϵ ∗ γ + β \tilde{x}_{\text {test }}=\frac{x_{\text {test }}-\mu_{r}}{\sqrt{\sigma_{r}^{2}+\epsilon}} * \gamma+\beta x~test =σr2+ϵxtest −μr∗γ+β
计算输出̃,其中 μ r , σ r 2 , γ , β \mu_{r}, \sigma_{r}^{2}, \gamma, \beta μr,σr2,γ,β均来自训练阶段统计或优化的结果,在测试阶段直接使用,并不会更新这些参数。
10.8.2 反向更新
在训练模式下的反向更新阶段,反向传播算法根据损失ℒ求解梯度 ∂ L ∂ γ \frac{\partial \mathcal{L}}{\partial \gamma} ∂γ∂L和 ∂ L ∂ β \frac{\partial \mathcal{L}}{\partial \beta} ∂β∂L,并按着梯度更新法则自动优化、参数。
需要注意的是,对于 2D 特征图输入: [b,ℎ, , ],BN 层并不是计算每个点的 μ B , σ B 2 \mu_{B}, \sigma_{B}^{2} μB,σB2,而是在通道轴上面统计每个通道上面所有数据的 μ B , σ B 2 \mu_{B}, \sigma_{B}^{2} μB,σB2,因此 μ B , σ B 2 \mu_{B}, \sigma_{B}^{2} μB,σB2是每个通道上所有其它维度的均值和方差。以 shape 为 [100,32, 32, 3 ]的输入为例,在通道轴上面的均值计算如下:
# 构造输入
x=tf.random.normal([100,32,32,3])
#将其他维度合并,仅保留通道维度
x=tf.reshape(x,[-1,3])
#计算其他维度的均值
ub=tf.reduce_mean(x,axis=0)
print(ub)
<tf.Tensor: id=62, shape=(3,), dtype=float32, numpy=array([-0.00222636, -
0.00049868, -0.00180082], dtype=float32)>
数据有个通道数,则有个均值产生。
除了在轴上面统计数据 μ B , σ B 2 \mu_{B}, \sigma_{B}^{2} μB,σB2的方式,我们也很容易将其推广至其它维度计算均值的方式,如图 10.41 所示:
❑ Layer Norm:统计每个样本的所有特征的均值和方差
❑ Instance Norm:统计每个样本的每个通道上特征的均值和方差
❑ Group Norm:将通道分成若干组,统计每个样本的通道组内的特征均值和方差
上面提到的 Normalization 方法均由独立的几篇论文提出,并在某些应用上验证了其相当或者优于 BatchNorm 算法的效果。由此可见,深度学习算法研究并非难于上青天,只要多思考、多锻炼算法工程能力,人人都有机会发表创新性成果。

10.8.3 BN 层实现
在 TensorFlow 中,通过 layers.BatchNormalization()类可以非常方便地实现 BN 层:
# 创建 BN 层
layer=layers.BatchNormalization()
与全连接层、卷积层不同,BN 层的训练阶段和测试阶段的行为不同,需要通过设置training 标志位来区分训练模式还是测试模式。
以 LeNet-5 的网络模型为例,在卷积层后添加 BN 层,代码如下:
network=Sequential([
layers.Conv2D(6,kernel_size=3,strides=1),
#插入BN层
layers.BatchNormalization(),
layers.MaxPooling2D(pool_size=2,strides=2),
layers.ReLU(),
layers.Conv2D(16,kernel_size=3,strides=1),
#插入BN层
layers.BatchNormalization(),
layers.MaxPooling2D(pool_size=2,strides=2),
layers.ReLU(),
layers.Flatten(),
layer.Dense(120,activation='relu'),
#此处也可以插入BN层
layers.Dense(84,activation='relu'),
#此处也可以插入BN层
layers.Dense(10)
])
在训练阶段,需要设置网络的参数 training=True 以区分 BN 层是训练还是测试模型,代码如下:
with tf.GradientTape() as tape:
# 插入通道维度
x=tf.expand_dims(x,axis=3)
# 前向计算,设置计算模式:[b,784]=>[b,10]
out=network(x,training=True)
在测试阶段,需要设置 training=False,避免 BN 层采用错误的行为,代码如下:
with tf.GradientTape() as tape:
# 插入通道维度
x=tf.expand_dims(x,axis=3)
# 前向计算,设置计算模式:[b,784]=>[b,10]
out=network(x,training=False)
10.9 经典卷积网络
自 2012 年 AlexNet的提出以来,各种各样的深度卷积神经网络模型相继被提出,其中比较有代表性的有 VGG 系列 ,GoogLeNet 系列,ResNet 系列 ,DenseNet系列等,他们的网络层数整体趋势逐渐增多。
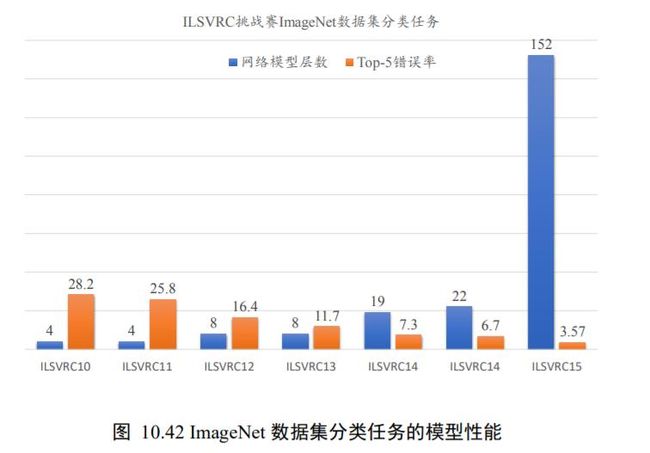
以网络模型在 ILSVRC 挑战赛 ImageNet数据集上面的分类性能表现为例,如图 10.42 所示,在 AlexNet 出现之前的网络模型都是浅层的神经网络,Top-5 错误率均在 25%以上,AlexNet 8 层的深层神经网络将 Top-5 错误率降低至 16.4%,性能提升巨大,后续的 VGG、GoogleNet 模型继续将错误率降低至6.7%;ResNet 的出现首次将网络层数提升至 152 层,错误率也降低至 3.57%。
本节将重点介绍这几种网络模型的特点。
10.9.1 AlexNet
2012 年,ILSVRC12 挑战赛 ImageNet 数据集分类任务的冠军 Alex Krizhevsky 提出了 8层的深度神经网络模型 AlexNet,它接收输入为224 × 224 大小的彩色图片数据,经过五个卷积层和三个全连接层后得到样本属于 1000 个类别的概率分布。
为了降低特征图的维度,AlexNet 在第 1、2、5 个卷积层后添加了 Max Pooling 层,如图 10.43 所示,网络的参数量达到了 6000 万个。为了能够在当时的显卡设备 NVIDIA GTX 580(3GB 显存)上训练模型,Alex Krizhevsky 将卷积层、前 2 个全连接层等拆开在两块显卡上面分别训练,最后一层合并到一张显卡上面,进行反向传播更新。AlexNet 在 ImageNet 取得了 15.3%的 Top-5 错误率,比第二名在错误率上降低了 10.9%。
AlexNet 的创新之处在于:
❑ 层数达到了较深的 8 层。
❑ 采用了 ReLU 激活函数,过去的神经网络大多采用 Sigmoid 激活函数,计算相对复杂,容易出现梯度弥散现象。
❑ 引入 Dropout 层。Dropout 提高了模型的泛化能力,防止过拟合。

10.9.2 VGG 系列
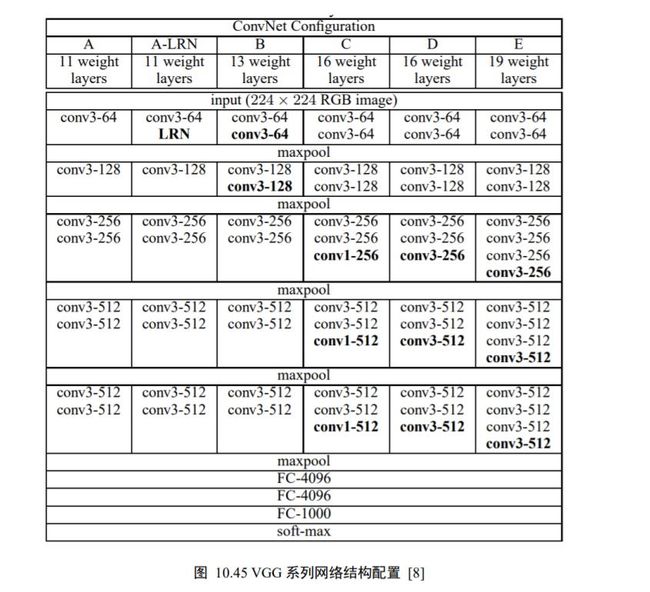
AlexNet 模型的优越性能启发了业界朝着更深层的网络模型方向研究。2014 年,ILSVRC14 挑战赛 ImageNet 分类任务的亚军牛津大学 VGG 实验室提出了 VGG11、VGG13、VGG16、VGG19 等一系列的网络模型(图 10.45),并将网络深度最高提升至 19层 。
以 VGG16 为例,它接受224 × 224 大小的彩色图片数据,经过 2 个 Conv-ConvPooling 单元,和 3 个 Conv-Conv-Conv-Pooling 单元的叠,最后通过 3 层全连接层输出当前图片分别属于 1000 类别的概率分布,如图 10.44 所示。VGG16 在 ImageNet 取得了7.4%的 Top-5 错误率,比 AlexNet 在错误率上降低了 7.9%。

VGG 系列网络的创新之处在于:
❑ 层数提升至 19 层。
❑ 全部采用更小的3 × 3卷积核,相对于 AlexNet 中 7×7 的卷积核,参数量更少,计算代价更低。
❑ 采用更小的池化层2 × 2窗口和步长 = 2,而 AlexNet 中是步长 = 2、3 × 3的池化窗口。
10.9.3 GoogLeNet
3 × 3的卷积核参数量更少,计算代价更低,同时在性能表现上甚至更优越,因此业界开始探索卷积核最小的情况: 1×1卷积核。如下图 10.46 所示,输入为 3 通道的 5×5 图片,与单个 1×1 的卷积核进行卷积运算,每个通道的数据与对应通道的卷积核运算,得到3 个通道的中间矩阵,对应位置相加得到最终的输出张量。
对于输入 shape 为[b, ℎ, , C i n C_{in} Cin] ,1×1 卷积层的输出为[b, ℎ, , C o u t C_{out} Cout] ,其中 C i n C_{in} Cin为输入数据的通道数, C o u t C_{out} Cout为输出数据的通道数,也是 1×1 卷积核的数量。 1×1卷积核的一个特别之处在于,它可以不改变特征图的宽高,而只对通道数进行变换。

2014 年,ILSVRC14 挑战赛的冠军 Google 提出了大量采用3 × 3和 1×1 卷积核的网络模型:GoogLeNet,网络层数达到了 22 层。虽然 GoogLeNet 的层数远大于 AlexNet,但是它的参数量却只有 AlexNet 1/12,同时性能也远好于 AlexNet。在 ImageNet 数据集分类任务上,GoogLeNet 取得了 6.7%的 Top-5 错误率,比 VGG16 在错误率上降低了 0.7%。
GoogLeNet 网络采用模块化设计的思想,通过大量堆叠 Inception 模块,形成了复杂的网络结构。如下图 10.47 所示,Inception 模块的输入为,通过 4 个子网络得到 4 个网络输出,在通道轴上面进行拼接合并,形成 Inception 模块的输出。这 4 个子网络是:
❑ 1×1 卷积层。
❑ 1×1 卷积层,再通过一个3 × 3卷积层。
❑ 1×1 卷积层,再通过一个 5×5 卷积层。
❑ 3 × 3最大池化层,再通过 1×1 卷积层。
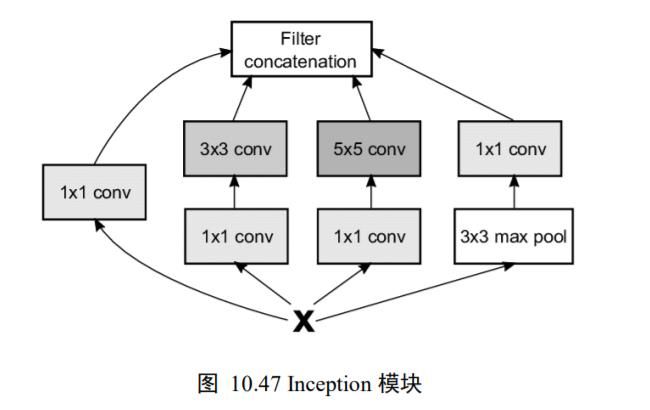
GoogLeNet 的网络结构如图 10.48 所示,其中红色框中的网络结构即为图 10.47的网络结构。

10.10 CIFAR10 与 VGG13 实战
MNIST 是机器学习最常用的数据集之一,但由于手写数字图片非常简单,并且MNIST 数据集只保存了图片灰度信息,并不适合输入设计为 RGB 三通道的网络模型。本节将介绍另一个经典的图片分类数据集:CIFAR10。
CIFAR10 数据集由加拿大 Canadian Institute For Advanced Research 发布,它包含了飞机、汽车、鸟、猫等共 10 大类物体的彩色图片,每个种类收集了 6000 张32 × 32大小图片,共 6 万张图片。其中 5 万张作为训练数据集,1 万张作为测试数据集。每个种类样片如图 10.49 所示。

在TensorFlow中,同样地,不需要手动下载、解析和加载 CIFAR10 数据集,通过datasets.cifar10.load_data()函数就可以直接加载切割好的训练集和测试集。例如:
def preprocess(x, y):
# [0~1]
x = 2 * tf.cast(x, dtype=tf.float32) / 255. - 1
y = tf.cast(y, dtype=tf.int32)
return x, y
(x,y),(x_test,y_test)=datasets.cifar10.load_data()
#删除y的一个维度,[b,1]=>[b]
y=tf.squeeze(y,axis=1)
y_test=tf.squeeze(y_test,axis=1)
print(x.shape,y.shape,x_test.shape,y_test.shape)
#构建训练集对象,随机打乱,预处理,批量化
train_db=tf.data.Dataset.from_tensor_slices((x,y))
train_db=train_db.shuffle(1000).batch(128).map(preprocess)
#构建测试集对象,预处理,批量化
test_db=tf.data.Dataset.from_tensor_slices((x_test,y_test))
test_db=test_db.batch(128).map(preprocess)
# 从训练集中采样一个Batch,并观察
sample=next(iter(train_db))
print('sample:',sample[0].shape,sample[1].shape,tf.reduce_min(sample[0]),tf.reduce_max(sample[0]))
(50000, 32, 32, 3) (50000,) (10000, 32, 32, 3) (10000,)
sample: (128, 32, 32, 3) (128,) tf.Tensor(-1.0, shape=(), dtype=float32) tf.Tensor(1.0, shape=(), dtype=float32)
TensorFlow 会自动将数据集下载在 C:\Users\用户名.keras\datasets 路径下,用户可以查看,也可手动删除不需要的数据集缓存。上述代码运行后,得到训练集的和形状为:(50000, 32, 32, 3)和(50000),测试集的和形状为(10000, 32, 32, 3)和(10000),分别代表了图片大小为32 × 32,彩色图片,训练集样本数为 50000,测试集样本数为 10000。
CIFAR10 图片识别任务并不简单,这主要是由于 CIFAR10 的图片内容需要大量细节才能呈现,而保存的图片分辨率仅有32 × 32,使得部分主体信息较为模糊,甚至人眼都很难分辨。浅层的神经网络表达能力有限,很难训练优化到较好的性能,本节将基于表达能力更强的 VGG13 网络,根据我们的数据集特点修改部分网络结构,完成 CIFAR10 图片识别。修改如下:
❑ 将网络输入调整为32 × 32。原网络输入为224 × 224 ,导致全连接层输入特征维度过大,网络参数量过大。
❑ 3 个全连接层的维度调整为 [256,64,10] ,满足 10 分类任务的设定。
图 10.50 是调整后的 VGG13 网络结构,我们统称之为 VGG13 网络模型。

我们将网络实现为 2 个子网络:卷积子网络和全连接子网络。卷积子网络由 5 个子模块构成,每个子模块包含了 Conv-Conv-MaxPooling 单元结构,代码如下:
# 先创建包含多网络层的列表
conv_layers=[
#Conv-Conv-Pooling单元1
#64个3*3卷积核,输入输出同大小
layers.Conv2D(64,kernel_size=[3,3],padding='same',activation=tf.nn.relu),
layers.Conv2D(64,kernel_size=[3,3],padding='same',activation=tf.nn.relu),
#高宽减半
layers.Maxpool2D(pool_size=[2,2],strides=2,padding='same'),
#Conv-Conv-Pooling单元2,输出通道提升至128,高宽大小减半
layers.Conv2D(128,kernel_size=[3,3],padding='same',activation=tf.nn.relu),
layers.Conv2D(128,kernel_size=[3,3],padding='same',activation=tf.nn.relu),
#高宽减半
layers.Maxpool2D(pool_size=[2,2],strides=2,padding='same'),
# Conv-Conv-Pooling单元3,输出通道提升至256,高宽大小减半
layers.Conv2D(256, kernel_size=[3, 3], padding='same', activation=tf.nn.relu),
layers.Conv2D(256, kernel_size=[3, 3], padding='same', activation=tf.nn.relu),
# 高宽减半
layers.Maxpool2D(pool_size=[2, 2], strides=2, padding='same'),
# Conv-Conv-Pooling单元4,输出通道提升至512,高宽大小减半
layers.Conv2D(512, kernel_size=[3, 3], padding='same', activation=tf.nn.relu),
layers.Conv2D(512, kernel_size=[3, 3], padding='same', activation=tf.nn.relu),
# 高宽减半
layers.Maxpool2D(pool_size=[2, 2], strides=2, padding='same'),
# Conv-Conv-Pooling单元5,,输出通道提升至512,高宽大小减半
layers.Conv2D(512, kernel_size=[3, 3], padding='same', activation=tf.nn.relu),
layers.Conv2D(512, kernel_size=[3, 3], padding='same', activation=tf.nn.relu),
# 高宽减半
layers.Maxpool2D(pool_size=[2, 2], strides=2, padding='same'),
]
# 利用前面创建的层列表构建网络容器
conv_net=Sequential(conv_layers)
全连接子网络包含了 3 个全连接层,每层添加 ReLU 非线性激活函数,最后一层除外。代码如下:
# 创建 3 层全连接层子网络
#创建3层全连接层子网络
fc_net=Sequential([
layers.Dense(256,activation=tf.nn.relu),
layers.Dense(128,activation='relu'),
layers.Dense(10,activation=None),
])
子网络创建完成后,通过如下代码查看网络的参数量:
# build2 个子网络,并打印网络参数信息
conv_net.build(input_shape=[4, 32, 32, 3])
10.11 卷积层变种 41
fc_net.build(input_shape=[4, 512])
conv_net.summary()
fc_net.summary()
卷积网络总参数量约为 940 万个,全连接网络总参数量约为 17.7 万个,网络总参数量约为950 万个,相比于原始版本的 VGG13 参数量减少了很多。
由于我们将网络实现为 2 个子网络,在进行梯度更新时,需要合并 2 个子网络的待优化参数列表。代码如下:
#列表合并,合并2个子网络的参数
variables=conv_net.trainable_varibales+fc_net.trainable_varibales
# 对所有参数求梯度
grads=tape.gradient(loss,variables)
#自动更新
optimizer.apply_gradients(zip(grads,varibales))
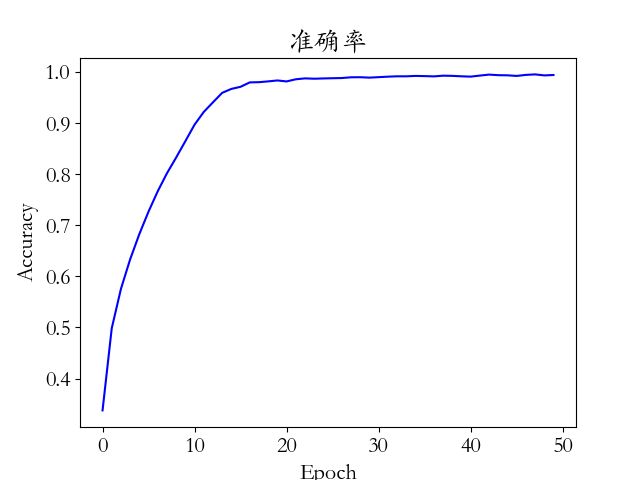
运行 cifar10_train.py 文件即可开始训练模型,在训练完 50 个 Epoch 后,网络的测试准确率达到了 77.5%。
下面我们就用代码总结以下上述知识点。
import os
import matplotlib.pyplot as plt
import tensorflow as tf
from tensorflow.keras import layers,optimizers,datasets,Sequential
plt.rcParams['font.size'] = 16
plt.rcParams['font.family'] = ['STKaiti']
plt.rcParams['axes.unicode_minus'] = False
os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2'
tf.random.set_seed(2345)
os.environ['TF_ENABLE_GPU_GARBAGE_COLLECTION'] = 'false'
# 获取 GPU 设备列表
gpus = tf.config.experimental.list_physical_devices('GPU')
if gpus:
try:
# 设置 GPU 为增长式占用
for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu, True)
except RuntimeError as e:
# 打印异常
print(e)
def preprocess(x, y):
# [0~1]
x = 2 * tf.cast(x, dtype=tf.float32) / 255. - 1
y = tf.cast(y, dtype=tf.int32)
return x, y
def load_dataset():
# 在线下载,加载CIFAR10数据集
(x,y),(x_test,y_test)=datasets.cifar10.load_data()
# 删除y的一个维度,[b,1]=>[b]
y=tf.squeeze(y,axis=1)
y_test=tf.squeeze(y_test,axis=1)
# 打印训练集和测试集的形状
print(x.shape,y.shape,x_test.shape,y_test.shape)
#构建训练集对象,随机打乱,预处理,批量化
train_db=tf.data.Dataset.from_tensor_slices((x,y))
train_db=train_db.shuffle(1000).map(preprocess).batch(128)
# 构建测试集对象,随机打乱,预处理,批量化
test_db=tf.data.Dataset.from_tensor_slices((x_test,y_test))
test_db=test_db.map(preprocess).batch(64)
# 从训练集中采样一个Batch,并观察
sample=next(iter(train_db))
print('sample:', sample[0].shape, sample[1].shape, tf.reduce_min(sample[0]), tf.reduce_max(sample[0]))
return train_db, test_db
def build_network():
# 先创建包含多网络层的列表
conv_layers=[
# 5 units of conv + max pooling
# Conv-Conv-Pooling 单元 1
# 64 个 3x3 卷积核, 输入输出同大小
layers.Conv2D(64, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.Conv2D(64, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
# 高宽减半
layers.MaxPool2D(pool_size=[2, 2], strides=2, padding='same'),
# Conv-Conv-Pooling 单元 2,输出通道提升至 128,高宽大小减半
layers.Conv2D(128, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.Conv2D(128, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.MaxPool2D(pool_size=[2, 2], strides=2, padding='same'),
# Conv-Conv-Pooling 单元 3,输出通道提升至 256,高宽大小减半
layers.Conv2D(256, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.Conv2D(256, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.MaxPool2D(pool_size=[2, 2], strides=2, padding='same'),
# Conv-Conv-Pooling 单元 4,输出通道提升至 512,高宽大小减半
layers.Conv2D(512, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.Conv2D(512, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.MaxPool2D(pool_size=[2, 2], strides=2, padding='same'),
# Conv-Conv-Pooling 单元 5,输出通道提升至 512,高宽大小减半
layers.Conv2D(512, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.Conv2D(512, kernel_size=[3, 3], padding="same", activation=tf.nn.relu),
layers.MaxPool2D(pool_size=[2, 2], strides=2, padding='same')
]
# 利用前面创建的层列表构建网络容器
conv_net=Sequential(conv_layers)
# 创建3层全连接层子网络
fc_net = Sequential([
layers.Dense(256, activation=tf.nn.relu),
layers.Dense(128, activation=tf.nn.relu),
layers.Dense(10, activation=None),
])
# build 2个子网络,并打印网络参数信息
conv_net.build(input_shape=[None,32,32,3])
fc_net.build(input_shape=(None,512))
conv_net.summary()
fc_net.summary()
return conv_net,fc_net
def train(conv_net,fc_net,train_db,optimizer,varibales,epoch):
for step,(x,y) in enumerate(train_db):
with tf.GradientTape() as tape:
#[b,32,32,3]=>[b,1,1,512]
out=conv_net(x)
# flatten,=>[b,512]
out=tf.reshape(out,[-1,512])
#[b,512]=>[b,10]
logits=fc_net(out)
#[b]=>[b,10]
y_onehot=tf.one_hot(y,depth=10)
# comput loss
loss=tf.losses.categorical_crossentropy(y_onehot,logits,from_logits=True)
loss=tf.reduce_sum(loss)
# 对所有参数求梯度
grads=tape.gradient(loss,varibales)
#自动更新
optimizer.apply_gradients(zip(grads,varibales))
if step %100==0:
print(epoch,step,'loss:',float(loss))
return conv_net,fc_net
def predict(conv_net,fc_net,test_db,epoch):
total_num=0
total_correct=0
for x,y in test_db:
out=conv_net(x)
out=tf.reshape(out,[-1,512])
logits=fc_net(out)
prob=tf.nn.softmax(logits,axis=1)
pred=tf.argmax(prob,axis=1)
pred=tf.cast(pred,dtype=tf.int32)
correct=tf.cast(tf.equal(pred,y),dtype=tf.int32)
correct=tf.reduce_sum(correct)
total_num+=x.shape[0]
total_correct+=int(correct)
acc=total_correct/total_num
print(epoch,'axx:',acc)
return acc
def main():
epoch_num=50
train_db,test_db=load_dataset()
conv_net,fc_net=build_network()
optimizer=optimizers.Adam(lr=1e-4)
#列表合并,合并2个子网络的参数
variables=conv_net.trainable_variables+fc_net.trainable_variables
accs=[]
for epoch in range(epoch_num):
conv_net,fc_net=train(conv_net,fc_net,train_db,optimizer,variables,epoch)
acc=predict(conv_net,fc_net,test_db,epoch)
accs.append(acc)
x=range(epoch_num)
plt.title('准确率')
plt.plot(x,accs,color='blue')
plt.xlabel('Epoch')
plt.ylabel('Accuracy')
#plt.savefig('cifar10-vgg13-accuracy.png')
if __name__=='__main__':
main()
10.11 卷积层变种
卷积神经网络的研究产生了各种各样优秀的网络模型,还提出了各种卷积层的变种,本节将重点介绍数种典型的卷积层变种。
10.11.1 空洞卷积
普通的卷积层为了减少网络的参数量,卷积核的设计通常选择较小的 1×1 和3 × 3感受野大小。小卷积核使得网络提取特征时的感受野区域有限,但是增大感受野的区域又会增加网络的参数量和计算代价,因此需要权衡设计。
空洞卷积(Dilated/Atrous Convolution)的提出较好地解决这个问题,空洞卷积在普通卷积的感受野上增加一个 Dilation Rate 参数,用于控制感受野区域的采样步长,如下图10.51 所示:当感受野的采样步长 Dilation Rate 为 1 时,每个感受野采样点之间的距离为1,此时的空洞卷积退化为普通的卷积;当 Dilation Rate 为 2 时,感受野每 2 个单元采样一个点,如图 10.51 中间的绿色方框中绿色格子所示,每个采样格子之间的距离为 2;同样的方法,图 10.51 右边的 Dilation Rate 为 3,采样步长为 3。尽管 Dilation Rate 的增大会使得感受野区域增大,但是实际参与运算的点数仍然保持不变。

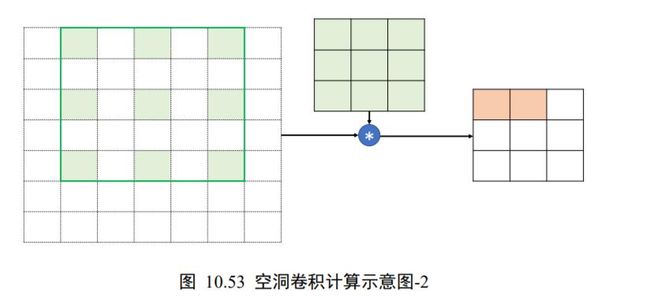
以输入为单通道的 7×7 张量,单个3 × 3卷积核为例,如下图 10.52 所示。在初始位置,感受野从最上、最右位置开始采样,每隔一个点采样一次,共采集 9 个数据点,如图10.52 中绿色方框所示。这 9 个数据点与卷积核相乘运算,写入输出张量的对应位置。

卷积核窗口按着步长为 =1 向右移动一个单位,如图 10.53 所示,同样进行隔点采样,共采样 9 个数据点,与卷积核完成相乘累加运算,写入输出张量对应位置,直至卷积核移动至最下方、最右边位置。需要注意区分的是,卷积核窗口的移动步长和感受野区域的采样步长 Dilation Rate 是不同的概念。
空洞卷积在不增加网络参数的条件下,提供了更大的感受野窗口。但是在使用空洞卷积设置网络模型时,需要精心设计 Dilation Rate 参数来避免出现网格效应,同时较大的Dilation Rate 参数并不利于小物体的检测、语义分割等任务。
在 TensorFlow 中,可以通过设置 layers.Conv2D()类的 dilation_rate 参数来选择使用普通卷积还是空洞卷积。例如:
x = tf.random.normal([1,7,7,1]) # 模拟输入
# 空洞卷积,1 个 3x3 的卷积核
layer = layers.Conv2D(1,kernel_size=3,strides=1,dilation_rate=2)
out = layer(x) # 前向计算
out.shape
TensorShape([1, 3, 3, 1])
当 dilation_rate 参数设置为默认值 1 时,使用普通卷积方式进行运算;当 dilation_rate参数大于 1 时,采样空洞卷积方式进行计算。
10.11.2 转置卷积
转置卷积(Transposed Convolution,或 Fractionally Strided Convolution,部分资料也称之为反卷积/Deconvolution,实际上反卷积在数学上定义为卷积的逆过程,但转置卷积并不能恢复出原卷积的输入,因此称为反卷积并不妥当)通过在输入之间填充大量的 padding 来实现输出高宽大于输入高宽的效果,从而实现向上采样的目的,如图 10.54 所示。我们先介绍转置卷积的计算过程,再介绍转置卷积与普通卷积的联系。
为了简化讨论,我们此处只讨论输入ℎ = ,即输入高宽相等的情况。

+ − 为倍数
考虑输入为2 × 2的单通道特征图,转置卷积核为3 × 3大小,步长 = 2,填充 =0的例子。首先在输入数据点之间均匀插入 −1 个空白数据点,得到3 × 3的矩阵,如图 10.55第 2 个矩阵所示,根据填充量在3 × 3矩阵周围填充相应 − −1 = 3 − 0−1 = 2行/列,此时输入张量的高宽为 7×7 ,如图 10.55 中第 3 个矩阵所示。
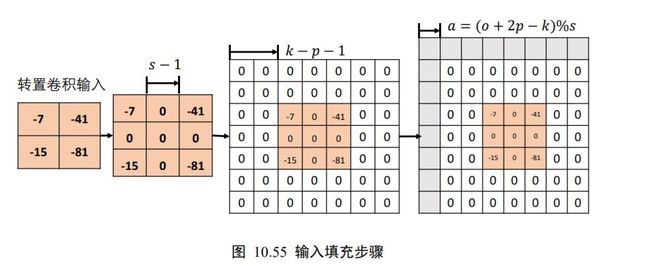
在 7×7 的输入张量上,进行3 × 3卷积核,步长′ =1 ,填充 =0 的普通卷积运算(注意,此阶段的普通卷积的步长′始终为 1,与转置卷积的步长不同),根据普通卷积的输出计算公式,得到输出大小为:
o = ∣ i + 2 ∗ p − k s ′ ⌋ + 1 = ⌊ 7 + 2 ∗ 0 − 3 1 ⌋ + 1 = 5 \left.o=| \frac{i+2 * p-k}{s^{\prime}}\right\rfloor+1=\left\lfloor\frac{7+2 * 0-3}{1}\right\rfloor+1=5 o=∣s′i+2∗p−k⌋+1=⌊17+2∗0−3⌋+1=5
5×5 大小的输出。我们直接按照此计算流程给出最终转置卷积输出与输入关系。在 +
2 − 为 s 倍数时,满足关系
o = ( i − 1 ) s + k − 2 p o=(i-1) s+k-2 p o=(i−1)s+k−2p
转置卷积并不是普通卷积的逆过程,但是二者之间有一定的联系,同时转置卷积也是基于普通卷积实现的。在相同的设定下,输入经过普通卷积运算后得到 = Conv(),我们将送入转置卷积运算后,得到′ = ConvTranspose(),其中′ ≠ ,但是′与形状相同。我们可以用输入为 5×5 ,步长 = 2,填充 =0 ,3 × 3卷积核的普通卷积运算进行验证演示,如下图 10.56 所示。

可以看到,将转置卷积的输出 5×5 在同设定条件下送入普通卷积,可以得到2 × 2的输出,此大小恰好就是转置卷积的输入大小,同时我们也观察到,输出的2 × 2矩阵并不是转置卷积输入的2 × 2矩阵。转置卷积与普通卷积并不是互为逆过程,不能恢复出对方的输入内容,仅能恢复出等大小的张量。因此称之为反卷积并不贴切。
基于 TensorFlow 实现上述例子的转置卷积运算,代码如下:
#创建X矩阵,高宽各为5*5
x=tf.range(25)+1
# reshape成合法维度的张量
x=tf.reshape(x,[1,5,5,1])
x=tf.cast(x,tf.float32)
# 创建固定内容的卷积核矩阵
w=tf.constant([[-1,2,-3.],[4,-5,6],[-7,8,-9]])
# 调整为合法维度的张量
w=tf.expand_dims(w,axis=2)
w=tf.expand_dims(w,axis=3)
# 进行普通卷积运算
out=tf.nn.conv2d(x,w,strides=2,padding='VALID')
print(out)
<tf.Tensor: id=14, shape=(1, 2, 2, 1), dtype=float32, numpy=
array([[[[ -67.],
[ -77.]],
[[-117.],
[-127.]]]], dtype=float32)>
现在我们将普通卷积的输出作为转置卷积的输入,验证转置卷积的输出是否为 5×5 ,代码如下:
# 普通卷积的输出作为转置卷积的输入,进行转置卷积运算
xx = tf.nn.conv2d_transpose(out, w, strides=2,padding='VALID',output_shape=[1,5,5,1])
# 输出的高宽为 5x5
<tf.Tensor: id=117, shape=(5, 5), dtype=float32, numpy=
array([[ 67., -134., 278., -154., 231.],
[ -268., 335., -710., 385., -462.],
[ 586., -770., 1620., -870., 1074.],
[ -468., 585., -1210., 635., -762.],
[ 819., -936., 1942., -1016., 1143.]], dtype=float32)>
可以看到,转置卷积能够恢复出同大小的普通卷积的输入,但转置卷积的输出并不等同于普通卷积的输入。
+ − 不为倍数
让我们更加深入地分析卷积运算中输入与输出大小关系的一个细节。考虑卷积运算的输出表达式:
o = ⌊ i + 2 ∗ p − k s ⌋ + 1 o=\left\lfloor\frac{i+2 * p-k}{s}\right\rfloor+1 o=⌊si+2∗p−k⌋+1
当步长s > 时, ⌊ i + 2 ∗ p − k s ⌋ \left\lfloor\frac{i+2 * p-k}{s}\right\rfloor ⌊si+2∗p−k⌋向下取整运算使得出现多种不同输入尺寸对应到相同的输出尺寸上。举个例子,考虑输入大小为 6×6 ,卷积核大小为3 × 3,步长为1的卷积运算,代码如下:
x=tf.random.normal([1,6,6,1])
# 6*6的输入经过普通卷积
out=tf.nn.conv2d(x,w,strides=2,padding='VALID')
print(out)
<tf.Tensor: id=21, shape=(1, 2, 2, 1), dtype=float32, numpy=
array([[[[ 20.438847 ],
[ 19.160788 ]],
[[ 0.8098897],
[-28.30303 ]]]], dtype=float32)>
此种情况也能获得2 × 2大小的卷积输出,与图 10.56 中可以获得相同大小的输出。因此,不同输入大小的卷积运算可能获得相同大小的输出。考虑到卷积与转置卷积输入输出大小关系互换,从转置卷积的角度来说,输入尺寸经过转置卷积运算后,可能获得不同的输出大小。因此通过在图 10.55 中填充行、列来实现不同大小的输出,从而恢复普通卷积不同大小的输入的情况,其中关系为:
a = ( o + 2 p − k ) % s a=(o+2 p-k) \%s a=(o+2p−k)%s
此时转置卷积的输出变为:
o = ( i − 1 ) s + k − 2 p + a o=(i-1) s+k-2 p+a o=(i−1)s+k−2p+a
在 TensorFlow 中间,不需要手动指定参数,只需要指定输出尺寸即可,TensorFlow会自动推导需要填充的行列数,前提是输出尺寸合法。例如:
xx=tf.nn.conv2d_transpose(out,w,strides=2,padding='VALID',output_shape=[1,6,6,1])
print(xx)
<tf.Tensor: id=23, shape=(1, 6, 6, 1), dtype=float32, numpy=
array([[[[ -20.438847 ],
[ 40.877693 ],
[ -80.477325 ],
[ 38.321575 ],
[ -57.48236 ],
[ 0. ]],...
通过改变参数 output_shape=[1,5,5,1]也可以获得高宽为 × 的张量。
矩阵角度
转置卷积的转置是指卷积核矩阵产生的稀疏矩阵′在计算过程中需要先转置 w ′ T w'^{T} w′T,再进行矩阵相乘运算,而普通卷积并没有转置′的步骤。这也是它被称为转置卷积的名字由来。
考虑普通 Conv2d 运算:和,需要根据 strides 将卷积核在行、列方向循环移动获取参与运算的感受野的数据,串行计算每个窗口处的“相乘累加”值,计算效率极低。为了加速运算,在数学上可以将卷积核根据 strides 重排成稀疏矩阵′,再通过′@′一次完成运算(实际上,′矩阵过于稀疏,导致很多无用的 0 乘运算,很多深度学习框架也不是通过这种方式实现的)。
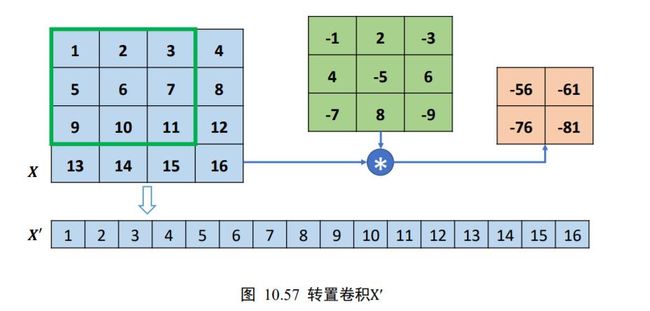
以 4 行 4 列的输入,高宽为3 × 3,步长为 1,无 padding 的卷积核的卷积运算为例,首先将打平成′,如图 10.57 所示。
然后将卷积核转换成稀疏矩阵′,如图 10.58 所示。

此时通过一次矩阵相乘即可实现普通卷积运算:
O ′ = W ′ @ X ′ \boldsymbol{O}^{\prime}=\boldsymbol{W}^{\prime} \boldsymbol{@} \boldsymbol{X}^{\prime} O′=W′@X′
如果给定,希望能够生成与同形状大小的张量,怎么实现呢?将′转置后与图 10.57
方法重排后的′完成矩阵相乘即可:
X ′ = W ′ T @ O ′ \boldsymbol{X}^{\prime}=\boldsymbol{W}^{\prime \mathrm{T}} @ \boldsymbol{O}^{\prime} X′=W′T@O′
得到的′通过 Reshape 操作变为与原来的输入尺寸一致,但是内容不同。例如′的 shape为[4,1] ,′T的 shape 为[16,4] ,矩阵相乘得到′的 shape 为[16,1],Reshape 后即可产生[4,4] 形状的张量。由于转置卷积在矩阵运算时,需要将′转置后才能与转置卷积的输入′矩阵相乘,故称为转置卷积。
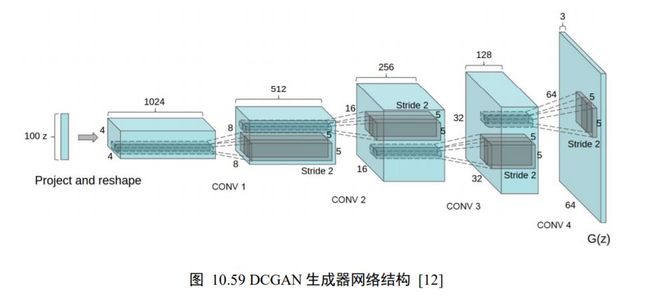
转置卷积具有“放大特征图”的功能,在生成对抗网络、语义分割等中得到了广泛应用,如 DCGAN 中的生成器通过堆叠转置卷积层实现逐层“放大”特征图,最后获得十分逼真的生成图片。
转置卷积实现
在 TensorFlow 中,可以通过 nn.conv2d_transpose 实现转置卷积运算。我们先通过nn.conv2d 完成普通卷积运算。注意转置卷积的卷积核的定义格式为 [ , , c o u t c_{out} cout, c i n c_{in} cin ]。例如:
#创建4*4大小的输入
x=tf.range(16)+1
x=tf.reshape(x,[1,4,4,1])
#x=tf.cast(x,tf.float32)
#创建3*3卷积核
w=tf.constant([[-1,2,-3],[4,-5,6],[-7,8,-9]])
w=tf.expand_dims(w,axis=2)
w=tf.expand_dims(w,axis=3)
# 普通卷积运算
out=tf.nn.conv2d(x,w,strides=1,padding='VALID')
print(out)
<tf.Tensor: id=42, shape=(1,2,2,1), dtype=float32, numpy=
array([[-56., -61.],
[-76., -81.]], dtype=float32)>
在保持 strides=1,padding=’VALID’,卷积核不变的情况下,我们通过卷积核 w 与输出 out 的转置卷积运算尝试恢复与输入 x 相同大小的高宽张量,代码如下:
xx=tf.nn.conv2d_transpose(out,w,strides=1,padding='VALID',output_shape=[1,4,4,1])
xx=tf.squeeze(xx)
print(xx)
<tf.Tensor: id=44, shape=(4, 4), dtype=float32, numpy=
array([[ 56., -51., 46., 183.],
[-148., -35., 35., -123.],
[ 88., 35., -35., 63.],
[ 532., -41., 36., 729.]], dtype=float32)>
可以看到,转置卷积生成了 × 的特征图,但特征图的数据与输入 x 并不相同。
在使用 tf.nn.conv2d_transpose 进行转置卷积运算时,需要额外手动设置输出的高宽。tf.nn.conv2d_transpose 并不支持自定义 padding 设置,只能设置为 VALID 或者 SAME。
当设置 padding=’VALID’时,输出大小表达为:
o = ( i − 1 ) s + k o=(i-1) s+k o=(i−1)s+k
当设置 padding=’SAME’时,输出大小表达为:
o = i ⋅ s o=i \cdot s o=i⋅s
如果读者对转置卷积的原理细节暂时无法理解,可以牢记上述两个表达式即可。例如,2 × 2的转置卷积输入与3 × 3的卷积核运算,strides=1,padding=’VALID’时,输出大小为:
h ′ = w ′ = ( 2 − 1 ) ⋅ 1 + 3 = 4 h^{\prime}=w^{\prime}=(2-1) \cdot 1+3=4 h′=w′=(2−1)⋅1+3=4
2 × 2的转置卷积输入与3 × 3的卷积核运算,strides=3,padding=’SAME’时,输出大小为:
h ′ = w ′ = 2 ⋅ 3 = 6 h^{\prime}=w^{\prime}=2 \cdot 3=6 h′=w′=2⋅3=6
转置卷积也可以和其他层一样,通过 layers.Conv2DTranspose 类创建一个转置卷积层,然后调用实例即可完成前向计算:
# 创建转置卷积类
layer = layers.Conv2DTranspose(1,kernel_size=3,strides=1,padding='VALID')
xx2 = layer(out) # 通过转置卷积层
xx2
<tf.Tensor: id=130, shape=(1, 4, 4, 1), dtype=float32, numpy=
array([[[[ 9.7032385 ],
[ 5.485071 ],
[ -1.6490463 ],
[ 1.6279562 ]],...
10.11.3 分离卷积
这里以深度可分离卷积(Depth-wise Separable Convolution)为例。普通卷积在对多通道输入进行运算时,卷积核的每个通道与输入的每个通道分别进行卷积运算,得到多通道的特征图,再对应元素相加产生单个卷积核的最终输出,如图 10.60 所示。
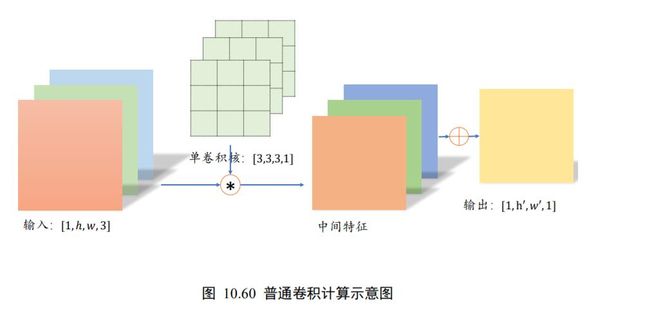
分离卷积的计算流程则不同,卷积核的每个通道与输入的每个通道进行卷积运算,得到多个通道的中间特征,如图 10.61 所示。这个多通道的中间特征张量接下来进行多个 1×1 卷积核的普通卷积运算,得到多个高宽不变的输出,这些输出在通道轴上面进行拼接,从而产生最终的分离卷积层的输出。可以看到,分离卷积层包含了两步卷积运算,第一步卷积运算是单个卷积核,第二个卷积运算包含了多个卷积核。

那么采用分离卷积有什么优势呢?一个很明显的优势在于,同样的输入和输出,采用Separable Convolution的参数量约是普通卷积的1/3。考虑上图中的普通卷积和分离卷积的例
子。普通卷积的参数量是
3 ⋅ 3 ⋅ 3 ⋅ 4 = 108 3 \cdot 3 \cdot 3 \cdot 4=108 3⋅3⋅3⋅4=108
分离卷积的第一部分参数量是
3 ⋅ 3 ⋅ 3 ⋅ 1 = 27 3 \cdot 3 \cdot 3 \cdot 1=27 3⋅3⋅3⋅1=27
第二部分参数量是
1 ⋅ 1 ⋅ 3 ⋅ 4 = 14 1 \cdot 1 \cdot 3 \cdot 4=14 1⋅1⋅3⋅4=14
分离卷积的总参数量只有39,但是却能实现普通卷积同样的输入输出尺寸变换。分离卷积在 Xception 和 MobileNets 等对计算代价敏感的领域中得到了大量应用。
10.12 深度残差网络
AlexNet、VGG、GoogLeNet 等网络模型的出现将神经网络的发展带入了几十层的阶段,研究人员发现网络的层数越深,越有可能获得更好的泛化能力。但是当模型加深以后,网络变得越来越难训练,这主要是由于梯度弥散和梯度爆炸现象造成的。在较深层数的神经网络中,梯度信息由网络的末层逐层传向网络的首层时,传递的过程中会出现梯度接近于 0 或梯度值非常大的现象。网络层数越深,这种现象可能会越严重。
那么怎么解决深层神经网络的梯度弥散和梯度爆炸现象呢?一个很自然的想法是,既然浅层神经网络不容易出现这些梯度现象,那么可以尝试给深层神经网络添加一种回退到浅层神经网络的机制。当深层神经网络可以轻松地回退到浅层神经网络时,深层神经网络可以获得与浅层神经网络相当的模型性能,而不至于更糟糕。
通过在输入和输出之间添加一条直接连接的 Skip Connection可以让神经网络具有回退的能力。以 VGG13 深度神经网络为例,假设观察到 VGG13 模型出现梯度弥散现象,而10 层的网络模型并没有观测到梯度弥散现象,那么可以考虑在最后的两个卷积层添加 Skip Connection,如图 10.62 中所示。通过这种方式,网络模型可以自动选择是否经由这两个卷积层完成特征变换,还是直接跳过这两个卷积层而选择 Skip Connection,亦或结合两个卷积层和 Skip Connection 的输出。

2015 年,微软亚洲研究院何凯明等人发表了基于 Skip Connection 的深度残差网络(Residual Neural Network,简称 ResNet)算法,并提出了 18 层、34 层、50 层、101层、152 层的 ResNet-18、ResNet-34、ResNet-50、ResNet-101 和 ResNet-152 等模型,甚至成功训练出层数达到 1202 层的极深层神经网络。ResNet 在 ILSVRC 2015 挑战赛 ImageNet数据集上的分类、检测等任务上面均获得了最好性能,ResNet 论文至今已经获得超 25000的引用量,可见 ResNet 在人工智能行业的影响力。
10.12.1 ResNet 原理
ResNet 通过在卷积层的输入和输出之间添加 Skip Connection 实现层数回退机制,如下图 10.63 所示,输入通过两个卷积层,得到特征变换后的输出ℱ(),与输入进行对应元素的相加运算,得到最终输出ℋ():
H ( x ) = x + F ( x ) \mathcal{H}(x)=x+\mathcal{F}(x) H(x)=x+F(x)
ℋ()叫作残差模块(Residual Block,简称 ResBlock)。由于被 Skip Connection 包围的卷积神经网络需要学习映射ℱ() = ℋ() − ,故称为残差网络。
为了能够满足输入与卷积层的输出ℱ()能够相加运算,需要输入的 shape 与ℱ()的shape 完全一致。当出现 shape 不一致时,一般通过在 Skip Connection 上添加额外的卷积运算环节将输入变换到与ℱ()相同的 shape,如图 10.63 中identity()函数所示,其中identity()以 1×1 的卷积运算居多,主要用于调整输入的通道数。

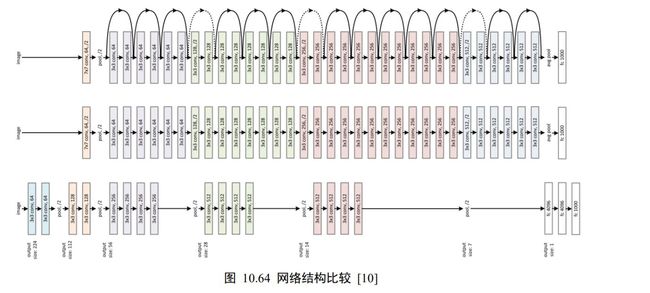
下图 10.64 对比了 34 层的深度残差网络、34 层的普通深度网络以及 19 层的 VGG 网络结构。可以看到,深度残差网络通过堆叠残差模块,达到了较深的网络层数,从而获得了训练稳定、性能优越的深层网络模型。
10.12.2 ResBlock 实现
深度残差网络并没有增加新的网络层类型,只是通过在输入和输出之间添加一条 Skip Connection,因此并没有针对 ResNet 的底层实现。在 TensorFlow 中通过调用普通卷积层即可实现残差模块。
首先创建一个新类,在初始化阶段创建残差块中需要的卷积层、激活函数层等,首先新建ℱ()卷积层,代码如下:
class BasicBlock(layers.Layer):
# 残差模块类
def __init__(self,filter_num,stride=1):
super(BasicBlock,self).__init__()
#f(x)包含了2个普通卷积层,创建卷积层1
self.conv1=layers.Conv2D(filter_num,(3,3),strides=stride,padding='same')
self.bn1=layers.BatchNormalzation()
self.relu=layers.Activation('relu')
# 创建卷积层2
self.conv2=layers.Conv2D(filter_num,(3,3),strides=1,padding='same')
self.bn2=layers.BatchNormalzation()
当ℱ()的形状与不同时,无法直接相加,我们需要新建identity()卷积层,来完成的形状转换。紧跟上面代码,实现如下:
if stride!=1:#插入identify层
self.downsample=Sequential()
self.downsample.add(layers.Conv2D(filter_num,(1,1),strides=stride))
else:# 否则,直接连接
self.downsample=lambda x:x
在前向传播时,只需要将ℱ()与identity()相加,并添加 ReLU 激活函数即可。前向计算函数代码下:
def call(self,inputs,training=None):
out=self.conv1(inputs)
out=self.bn1(out)
out=self.relu(out)
out=self.conv2(out)
out=self.bn2(out)
#输入通过identify()转换
identify=self.downsample(inputs)
# f(x)+x运算
output=layers.add([out,identify])
# 再通过激活函数并返回
output=tf.nn.relu(output)
return output
10.13 DenseNet
Skip Connection 的思想在 ResNet 上面获得了巨大的成功,研究人员开始尝试不同的Skip Connection 方案,其中比较流行的就是 DenseNet 。DenseNet 将前面所有层的特征图信息通过 Skip Connection 与当前层输出进行聚合,与 ResNet 的对应位置相加方式不同,DenseNet 采用在通道轴维度进行拼接操作,聚合特征信息。
如下图 10.65 所示,输入 X 0 X_{0} X0 通过 H 1 H_{1} H1卷积层得到输出 X 1 X_{1} X1, X 1 X_{1} X1与 X 0 X_{0} X0 在通道轴上进行拼接,得到聚合后的特征张量,送入 H 2 H_{2} H2卷积层,得到输出 X 2 X_{2} X2,同样的方法,2与前面所有层的特征信息 X 1 X_{1} X1与 X 0 X_{0} X0进行聚合,再送入下一层。如此循环,直至最后一层的输出 X 4 X_{4} X4和前面所有层的特征信息: { X i } i = 0 , 1 , 2 , 3 \left\{\boldsymbol{X}_{\boldsymbol{i}}\right\}_{i=0,1,2,3} { Xi}i=0,1,2,3进行聚合得到模块的最终输出。这样一种基于 SkipConnection 稠密连接的模块叫做 Dense Block。

DenseNet 通过堆叠多个 Dense Block 构成复杂的深层神经网络,如图 10.66 所示。

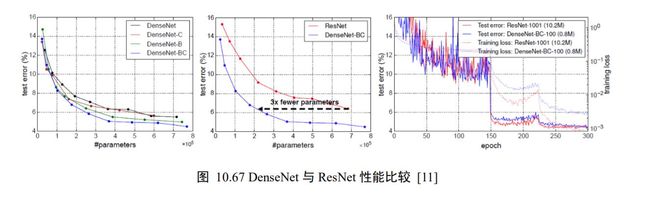
图 10.67 比较了不同版本的 DenseNet 的性能、DenseNet 与 ResNet 的性能比较,以及DenseNet 与 ResNet 训练曲线。
10.14 CIFAR10 与 ResNet18 实战
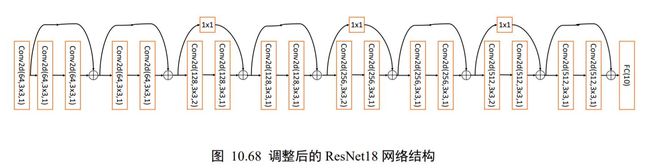
本节我们将实现 18 层的深度残差网络 ResNet18,并在 CIFAR10 图片数据集上训练与测试。并将与 13 层的普通神经网络 VGG13 进行简单的性能比较。
标准的 ResNet18 接受输入为224 × 224 大小的图片数据,我们将 ResNet18 进行适量调整,使得它输入大小为32 × 32,输出维度为 10。调整后的 ResNet18 网络结构如图 10.68所示。
首先实现中间两个卷积层,Skip Connection 1x1 卷积层的残差模块。代码如下:
class BasicBlock(layers.Layer):
# 残差模块
def __init__(self,filter_num,stride=1):
super(BasicBlock,self).__init__()
#第一个卷积单元
self.conv1=layers.Conv2D(filter_num,(3,3),strides=stride,padding='same')
self.bn1=layers.BatchNormalization()
self.relu=layers.Activation('relu')
#第二个卷积单元
self.conv2=layers.Conv2D(filter_num,(3,3),strides=1,padding='same')
self.bn2=layers.BatchNormalization()
if stride!=1:#通过1*1卷积完成shape匹配
self.downsample=Sequential()
self.downsample.add(layers.Conv2D(filter_num,(1,1),strides=stride))
else:# shape匹配,直接短接
self.downsample=lambda x:x
def call(self,inputs,training=None):
#前向计算函数
#[b,h,w,c],通过第一个卷积单元
out=self.conv1(inputs)
out=self.bn1(out)
out=self.relu(out)
#通过第二个卷积单元
out=self.conv2(out)
out=self.bn2(out)
#通过identify模块
identify=self.downsample(inputs)
#2条路径输出直接相加
output=layers.add([out,identify])
output=tf.nn.relu(output)#激活函数
return output
在设计深度卷积神经网络时,一般按照特征图高宽ℎ/逐渐减少,通道数逐渐增大的经验法则。可以通过堆叠通道数逐渐增大的 Res Block 来实现高层特征的提取,通过build_resblock 可以一次完成多个残差模块的新建。代码如下:
def build_resblock(self,filter_num,blocks,stride=1):
# 辅助函数,堆叠filter_num个BasicBlock
res_blocks=Sequential()
#只有第一个BasicBlock的步长可能不为1,实现下采样
res_blocks.add(BasicBlock(filter_num,stride))
for _ in range(1,blocks):#其他BasicBlock步长都为1
res_blocks.add(BasicBlock(filter_num,stride=1))
return res_blocks
下面我们来实现通用的 ResNet 网络模型。代码如下:
class ResNet(keras.Model):
def build_resblock(self, filter_num, blocks, stride=1):
# 辅助函数,堆叠filter_num个BasicBlock
res_blocks = Sequential()
# 只有第一个BasicBlock的步长可能不为1,实现下采样
res_blocks.add(BasicBlock(filter_num, stride))
for _ in range(1, blocks): # 其他BasicBlock步长都为1
res_blocks.add(BasicBlock(filter_num, stride=1))
return res_blocks
# 通用的ResNet实现类
def __init__(self,layer_dims,num_classes=10):
super(ResNet,self).__init__()
#根网络,预处理
self.stem=Sequential([
layers.Conv2D(64,(3,3),strides=(1,1)),
layers.BatchNormalization(),
layers.Activation('relu'),
layers.MaxPool2D(pool_size=(2,2),strides=(1,1),padding='same')
])
#堆叠4个Block,每个Block包含了多个BasicBlock,设置步长不一样
self.layer1=self.build_resblock(64,layer_dims[0])
self.layer2=self.build_resblock(128,layer_dims[1],strifdes=2)
self.layer3=self.build_resblock(256,layer_dims[2],strides=2)
self.layer4=self.build_resblock(512,layer_dims[3],strides=2)
#通过Pooling层将高宽降低为1*1
self.avgpool=layers.GlobalAveragePooling2D()
self.fc=layers.Dense(num_classes)
def call(self,inputs,training=None):
# 前向计算:通过根网络
x=self.stem(inputs)
# 一次通过4个模块
x=self.layer1(x)
x=self.layer2(x)
x=self.layer3(x)
x=self.layer4(x)
#通过池化层
x=self.avgpool(x)
#通过全连接层
x=self.fc(x)
通过调整每个 Res Block 的堆叠数量和通道数可以产生不同的 ResNet,如通过 64-64-128-128-256-256-512-512 通道数配置,共 8 个 Res Block,可得到 ResNet18 的网络模型。每个ResBlock 包含了 2 个主要的卷积层,因此卷积层数量是8 ∙ 2 =16,加上网络末尾的全连接层,共 18 层。创建 ResNet18 和 ResNet34 可以简单实现如下:
def resnet18():
#通过调整模块内部BasicBlock的数量和配置实现不同的ResNet
return ResNet([2,2,2,2])
def resnet34():
#通过调整模块内部BasicBlock的数量和配置实现不同的ResNet
return ResNet([3,4,6,3])
下面完成 CIFAR10 数据集的加载工作,代码如下:
(x,y), (x_test, y_test) = datasets.cifar10.load_data() # 加载数据集
y = tf.squeeze(y, axis=1) # 删除不必要的维度
y_test = tf.squeeze(y_test, axis=1) # 删除不必要的维度
print(x.shape, y.shape, x_test.shape, y_test.shape)
train_db = tf.data.Dataset.from_tensor_slices((x,y)) # 构建训练集
# 随机打散,预处理,批量化
train_db = train_db.shuffle(1000).map(preprocess).batch(512)
test_db = tf.data.Dataset.from_tensor_slices((x_test,y_test)) #构建测试集
# 随机打散,预处理,批量化
test_db = test_db.map(preprocess).batch(512)
第 10 章 卷积神经网络 58
# 采样一个样本
sample = next(iter(train_db))
print('sample:', sample[0].shape, sample[1].shape,
tf.reduce_min(sample[0]), tf.reduce_max(sample[0]))
数据的预处理逻辑比较简单,直接将数据范围映射到 − 区间。这里也可以基于ImageNet 数据图片的均值和标准差做标准化处理。代码如下:
def preprocess(x, y):
# 将数据映射到-1~1
x = 2*tf.cast(x, dtype=tf.float32) / 255. - 1
y = tf.cast(y, dtype=tf.int32) # 类型转换
return x,y
网络训练逻辑和普通的分类网络训练部分一样,固定训练 50 个 Epoch。代码如下:
for epoch in range(50): # 训练 epoch
for step, (x,y) in enumerate(train_db):
with tf.GradientTape() as tape:
# [b, 32, 32, 3] => [b, 10],前向传播
logits = model(x)
# [b] => [b, 10],one-hot 编码
y_onehot = tf.one_hot(y, depth=10)
# 计算交叉熵
loss = tf.losses.categorical_crossentropy(y_onehot, logits,
from_logits=True)
loss = tf.reduce_mean(loss)
# 计算梯度信息
grads = tape.gradient(loss, model.trainable_variables)
# 更新网络参数
optimizer.apply_gradients(zip(grads, model.trainable_variables))
ResNet18 的网络参数量共 1100 万个,经过 50 个 Epoch 后,网络的准确率达到了79.3%。我们这里的实战代码比较精简,在精挑超参数、数据增强等手段加持下,准确率可以达到更高。