【文献阅读4】Position-Based User-Centric Radio Resource Management in 5G UDN for URLLC Vehicular Commu
Position-based user-centric radio resource management in 5G UDN for ultra-reliable and low-latency vehicular communications(点击可见原文)
论文要解决的问题
- 场景:UUDN+车联网,城镇中的高速公路
- 待传数据:车辆协同感知信息的V2I上行传输
- 研究对象:RRM(无线资源管理)
- 资源:虚拟小区的构建和时频资源块的分配
- 优化目标:高可靠低时延
考虑到协同感知信息生成的周期性,使用 sps (半永久性调度) 降低延时;另一方面,相干时间小于调度间隔使得基于CSI的策略不再适合于车联网的 RRM ,考虑到 UDN 架构中 LOS 传输概率高,本文使用传输距离作为评价信道质量的依据。
系统模型
 用户中心式的车辆UDN网络模型
用户中心式的车辆UDN网络模型
假设待传信息的最大有效负载为 I_b bytes,所有 AV 以相同的速率 f_b 生成信息,其初始生成时刻均匀分布在周期 T = 1/f_b内。
VC发生重叠时,单个SBS同时服务多个 AV,但应分配单独的RB。
成功接收的判决条件:以 f_c 为中心,宽B的频带用于上行数据传输。整体的时频资源由 T*B 表示,RB作为资源分配的基本单位,其被定义为带宽为B_0、持续时间为 T_0的量。信息被成功接收的判据如下,根据此式算出SINR_0
![]()
其中 0 <  < 1 ,为表征包头和帧头开销的一个效率因子。假设每个RB占据全部频带即B_0 = B,在时域上每个RB仅占据 T/T_0,因此RB的集合可以表示为
< 1 ,为表征包头和帧头开销的一个效率因子。假设每个RB占据全部频带即B_0 = B,在时域上每个RB仅占据 T/T_0,因此RB的集合可以表示为 ![]() 。
。
接收策略:VC内的K个SBS独立地接收AV上传的信息,此方法虽然没有协同接收来的效果好但是它不需要集中式的协调机制并且可以降低前传容量的需求。当VC内的所有SBS的接收SINR均小于阈值SINR0的时候,视作接收失败。当T0(RB在时间域的长度)足够小的时候,信道在传输的时间内可视作不变。用![]() 表示i号车辆的同信道车辆的集合,K号SBS接收的来自i号车的SINR为
表示i号车辆的同信道车辆的集合,K号SBS接收的来自i号车的SINR为

P为接收功率,其展开如下:![]() ,等号右侧分别表示:发射功率、路损、对数正态的阴影衰落,多径瑞利衰落。
,等号右侧分别表示:发射功率、路损、对数正态的阴影衰落,多径瑞利衰落。
仿真模型

一个双向四车道的直线路段如上所示,假设SBS均匀分布在道路两侧,其与道路中央的距离为 ![]() ,SBS的间距为
,SBS的间距为 ![]() 。
。
车辆分布:其位置沿着道路方向建模为一维的齐次泊松点过程,密度为 ![]() ,各条路的交通流量为独立同分布
,各条路的交通流量为独立同分布
信息生成时刻均匀分布在一个信息生成周期上,也就是说,信息的到达服从泊松过程。
SBS和AB均部署单天线,有效高度分别为 ![]() 、
、![]() ,AV的辐射功率固定为
,AV的辐射功率固定为 ![]() 。
。
问题陈述
我们的任务是动态地 实现SBS和车辆的关联(即VC的成员更新) & 为每个AV分配RB,这两个动作都会是半永久性的,但其更新不必同时发生。事实上,VC成员随着车辆的移动需要频繁更新,而RB的分配可能不必那么频繁,所以这两者要分开进行。
VC成员更新考虑车辆和SBS的相对位置、方向以及 path的滞留时间。
RB分配需要考虑 时延和干扰:
- 时延:RAN (无线接入网) 的时延由四部分组成:排队~、传输~、处理~、重传~,除处理时延以外均和RB分配相关。本文不考虑重传、传输延迟固定为T_0,因此时延约束实际上仅考虑排队时延 L_Q。所以当信息生成后,期望能在L_Q内分配到RB以启动传输。当 AV 在
![t_i \in \(0, T]](http://img.e-com-net.com/image/info8/fabedd28b30548258626ddec419ae572.gif) 生成数据后,有效RB的标号集合为
生成数据后,有效RB的标号集合为 
- 干扰:考虑到UDN场景中每个VC的覆盖范围较小,因此考虑将同信道的车辆尽可能分开。由于排队延迟限制了车辆的有效RB数量,当LQ减小时,用于分离同信道车辆的自由度减小。
RRM策略
- VC成员选择:每个VC包含K个SBS,选择准则如下:对于i号车辆
 的VC成员标号,距离车辆越远标号越小。本策略考虑传输距离和方向,本策略应用在SBS随机分布的情况下,当SBS距离道路中央的垂直距离相等时,可以等效成一维的距离来简化计算(如上图的b所示)
的VC成员标号,距离车辆越远标号越小。本策略考虑传输距离和方向,本策略应用在SBS随机分布的情况下,当SBS距离道路中央的垂直距离相等时,可以等效成一维的距离来简化计算(如上图的b所示) - RB分配:为了分开通信到车辆,对于RB分配使用重用距离的策略,如上图b所示,以V0为研究对象,以其为中心,距离D的范围内的所有车,不和他用相同的RB。将问题陈述里的限制条件加进来以后,可以得到RB的分配策略如下

性能指标
因为对于特定的车辆,时延和干扰限制各自会筛选一部分RB,所以个别车可能无法分配到可用的RB。这些车称之为“阻塞”,其信息不会被发送。即便车辆分贝到了RB,其传输也可能因为SINR没有达到要求而失败。因此定义三个性能指标
- 阻塞率:表征网络的时延性能
其中N和N_{active,L_Q}分别表示 #AV 和 #激活态AV。
- 中断率:表征在一个信息周期内链路集的传输可靠性:
其中N_{succ}表示 #在周期内成功传输信息的车辆
- 数据包传输率:表征在时延期限内成功传输的包比率:
P_{PDR}可以反映系统级的可靠性和时延性能
性能评估
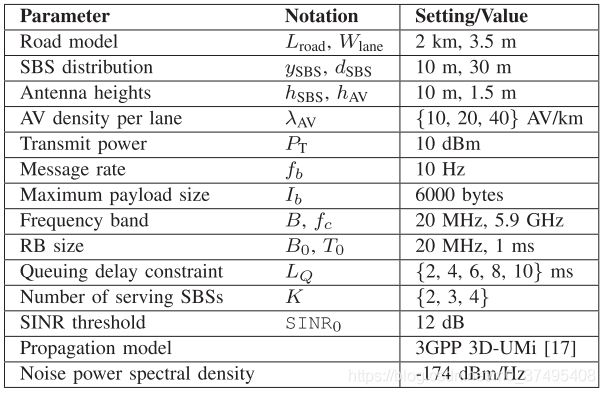
仿真中设置路长为6km,当RB分配之后,每个激活态的AV将发送20条信息。仅将在道路中央2km处的车纳入性能评估中。
信息的最大数据量设置为6k bytes [16],延迟和可靠性需求为20ms,999.999% [16],使用 3GPP 3D-UMi信道模型以描述小区及信道传播模型[17]。

如上图可见,拥塞率CR与车辆密度![]() 、排队时延L_Q、RB重用距离D相关,车辆密度增大、排队时延限制减小会导致更大的CR,减小重用距离D可以有效地降低CR。
、排队时延L_Q、RB重用距离D相关,车辆密度增大、排队时延限制减小会导致更大的CR,减小重用距离D可以有效地降低CR。

对于OR来说,改变LQ的时候对其影响不大;D较小时,车多的网络OR明显较高;车辆密度越大,增加D对OR的降低的幅度越大;这是因为分离了更多的干扰车辆;增大VC内的SBS数目K可以有效减小OR。
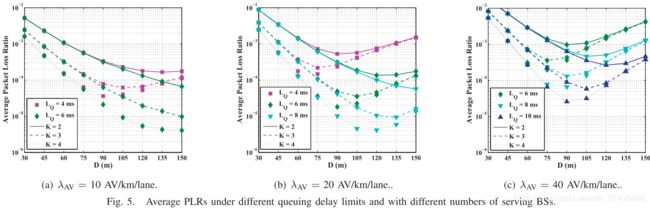
根据PLR的定义,其取决于CR和OR中较小的一方,因为增大D对OR CR的影响是相反的,因此可考虑如何选择最优的D;看b图同样色不同线形的案例,在固定车辆密度和L_Q不变的时候增大VC内SBS数目会导致最优D下降、平均PLR减小,因为其使得OR减小。然而通过增大VC成员带来的性能提升存在上界。因此,一个极低的目标PLR不一定在每个系统中都可以达成,尤其是当车辆密度大、或者L_Q非常严格时更加达不到。根据以上讨论也可知道在延迟和可靠性之间存在一个tradeoff。

对于协同环境感知来说,其注重成功传输的消息的密度,因此当车辆数目增多时,系统倾向于阻塞更多的AV以保证激活AV的传输可靠性。这时候如何提升链路级的传输可靠性?评价有效接收SINR的CDF是一个好方法,上图给出了CDF,下表整理了表格
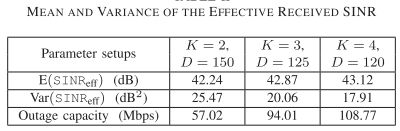
从中可见,增大K会增加有效SINR的均值并降低其方差,在K大的时候系统容量也要大得多。
结论:
- 在UUDN网络中,基于位置的RRM可以满足协同感知信息周期性上行传输的URLLC需求
- 通过SBS合作可以提供较高的链路级性能表现
- 承认此模型过于理想的假设有些不合实际,之后的研究可以考虑:非理想的前传链路和信令传输,重传机制,车辆不均匀的空间分布,车辆位置的误差。或考虑车辆的移动性以研究动态的资源分配策略。因为可靠性需求很高,计算机仿真时非常耗时,因此,分析性能评估也是必要的