anchor-free目标检测
Anchor-free目标检测
简介
沿着two-step到one-step,anchor-based到anchor-free的发展路线,如今,目标检测(Object Detection,OD)已经进入anchor-free的时代。这些anchor-free方法因为适用于多目标跟踪等领域,也促使了MOT的飞速发展。本文将沿着anchor-free目标检测发展地路线,简单介绍一下主要地一些方法思路,包括目前关注度较大地FCOS和CenterNet。
何为anchor
在了解anchor-free的方法前,我们得知道什么是anchor,在过去,目标检测通常被建模为对候选框的分类和回归,不过,按照候选区域的产生方式不同,分为二阶段(two-step)检测和单阶段(one-step)检测,前者的候选框通过RPN(区域推荐网络)网络产生proposal,后者通过滑窗产生anchor。

本文所提到的anchor-free方法则通过完全不同的思路解决目标检测问题,这些思路都没有采用预定义的候选框的概念。这两年,从CornerNet开始,anchor-free的目标检测框架层出不穷,宣告着目标检测迈入anchor-free时代。
anchor-free发展
其实anchor-free不是一个很新的概念,最早可以追溯到YOLO算法,这应该是最早的anchor-free模型,而最近的anchor-free方法主要分为基于密集预测和基于关键点估计两种。
早期研究
先是聊一聊目标检测比较古老的研究,分别是Densebox和YOLO,前者发表于2015年9月,后者则开源于2016年。
Densebox
首先来聊一聊Densebox,这是地平线的算法工程师黄李超于2015年设计的一个端到端检测框架,对此有专门的文章介绍。Densebox是深度学习用于目标检测的开山之作之一,当时已经有不错效果的R-CNN不够直接且高效,因而Densebox作者从OverFeat方法上得到启发:在图像上进行卷积等同于使用滑窗分类,为何不能使用全卷积对整个图像进行目标检测呢?

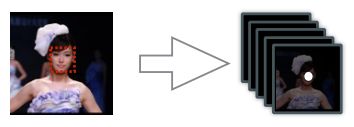
在这个基础上,设计了一套端到端的多任务全卷积模型,如上图所示。该模型可以直接回归出目标出现的置信度和相对位置,同时为了处理遮挡和小目标,引入上采用层融合浅层网络特征,得到更大的尺寸的输出特征图。下图是网络的输入和输出,对每个像素会得到一个5维向量,表示分类置信度和bbox到该pixel的四个距离。
Densebox的主要贡献有两个:证明了单FCN(全卷积网络)可以实现检测遮挡和不同尺度的目标;在FCN结构中添加少量层引入landmark localization,将landmark heatmap和score map融合能够进一步提高检测性能。
遗憾的是,当时目标检测的学者们沿着RCNN铺好的路亦步亦趋,现在想想,如果当时,就有足够多的关注给与Densebox,今天的目标检测是否会是全新的局面呢?
YOLO
2016年开源的YOLOv1算法,是目前工业界比较关注的算法之一,它开创性地将目标检测中的候选框生成和目标识别通过一步完成,因而论文名为“You only look once”,YOLO模型可以直接从整个图像上得到边界框和对应的置信度。比较详细的理解可以参考我之前YOLO算法的文章。
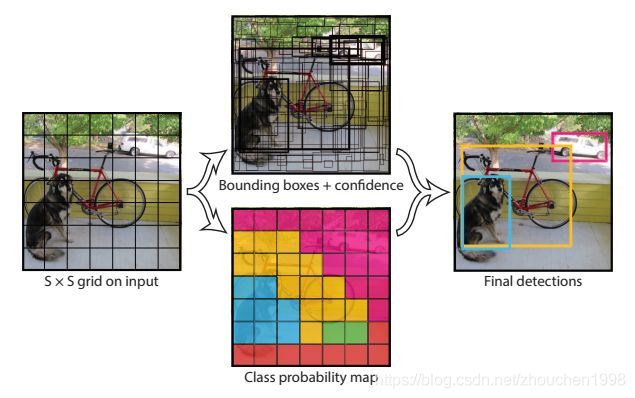
YOLO的最大创新就是速度快,一方面将候选框生成的步骤去除,另一方面,通过多个网格负责目标的检测,大大加快运行速度。
Densebox和YOLO很类似,都可以理解为单阶段检测,不过前者为密集预测,针对每个像素进行预测;后者针对划分得到的网格进行预测。同时,作为anchor-free的两篇开山之作,它们为后来的anchor-free检测提供了很多的思路。
基于密集预测
沿着上一节YOLO和Densebox的思路,2019年出现了很多以此为基础的目标检测方法,包括FCOS、FSAF以及FoveaBox等等方法。
FCOS
这是这两年受到广泛的关注的目标检测算法,一方面它确实是anchor-free系列打破anchor-based精度神话的关键之作,另一方面,业界对这种单阶段高效算法有着巨大的需求。
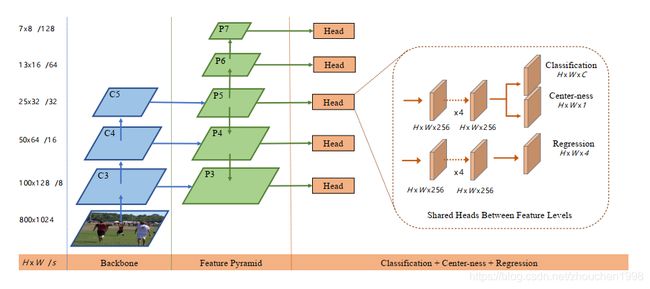
上图是FCOS的pipeline设计图,核心的就是一个特征金字塔和三分支头网络,通过backbone之后对feature map上每一个点进行回归预测,和以往目标检测任务不同的是,除了分类和回归分支,加入了center-ness以剔除低质量预测,它和分类分支的乘积为最终的置信度。
FCOS创新点如下:
- 突破基于Faster-RCNN修补的思路,开创性地不使用anchor而是直接对每个像素进行预测,并在效果是远超Faster-RCNN。这主要是考虑到anchor地存在会带来大量地超参数,如anchor number等,而且这些anchor要计算和GT地IOU,也是很消耗算力的。
- 由于是像素级别的密集预测,因此可以使用分割任务的一些trick并且通过修改目标分支可用于实例分割和关键点检测等任务。
- 由于是全卷积网络,拥有很多FCN任务的优势,也可以借用其思想。
FSAF
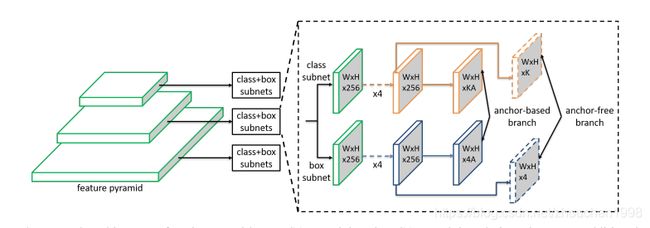
这是一个针对FPN的优化思路,提出FSAF模块,让网络自己学习anchor适配。在RetinaNet的基础上,FSAF模块引入了2个额外的卷积层,这两个卷积层各自负责anchor-free分支的分类和回归预测。此外,提出了在线特征选择策略,实例输入到特征金字塔的所有层,然后求得所有anchor-free分支focal loss和IoU loss的和,选择loss最小的特征层来学习实例。训练时,特征根据安排的实例进行更新。推理时,不需要进行特征更新,因为最合适的特征金字塔层必然输出高置信分数。
虽然都是基于密集预测,但相比于YOLO和Densebox,FCOS和FSAF使用FPN进行多尺度预测,此前的方法只有单尺度预测;不过,相比于YOLO这个单分支模型,其他方法都是通过两个子网络来进行分类和回归。
基于关键点估计
不同于密集预测的思路,以关键点估计为手段,目标检测出现了一条全新的主线,它彻底抛开了区域分类回归思想,主要出现了CornerNet、ExtremeNet以及集大成者的CenterNet,由于有两篇目标检测的文章网络名都是CenterNet,这里特指的是关注度比较高的Objects as points这篇文章。
CornerNet
这篇文章是后来很多基于关键点估计处理目标检测的算法基础,它开创性地用一对角点来检测目标。对一幅图像,预测两组heatmap,一组为top-left角点,另一组为bottom-right角点,每组heatmap有类别个通道。下图为框架图。

ExtremeNet
不同于CornerNet使用角点检测目标,ExtremeNet通过极值点和中心点来检测目标,这应该是最大地区别,其他一些关键点估计方面地细节,这里不多提。

CenterNet
下面来看看关键点估计用于目标检测地集大成者,CenterNet。抛开了传统的边框目标表示方法,将目标检测视为对一个点进行的关键点估计问题。相比较于基于bbox的方法,该模型端到端可微,其简单高效且实时性高。在主流地OD数据集上超越了大部分SOTA方法,且论文称在速度上超越了YOLO3。

通过中心点来表示目标,然后在中心点位置回归出目标的其他属性,这样,目标检测问题变成了一个关键点估计问题。只需要将图像传入全卷积网络,得到热力图,热力图的峰值点就是中心点。这里可以把中心点看做形状未知的锚点。但是该锚点只在位置上,没有尺寸框,没有阈值进行前后景分类;每个目标只会有一个正的锚点,因此不会用到NMS;而且,CenterNet与传统目标检测相比,下采样倍数较低,不需要多重特征图。
发展思路
成功原因
anchor-free能在精度上追赶上anchor-based方法,最大地原因应该归属上面绝大多数方法避不开地FPN(特征金字塔网络),因为在每个位置只预测一个框地前提下,FPN对尺度信息进行了很好地弥补,而Focal loss则对区域地回归有一定辅助效果。
anchor-free局限性
当然,anchor-free地目标检测方法也有很大地局限性,这些方法虽然声称精度追上了较好地二阶段方法,但存在一些训练上地细节以及部分不公平地比较。不过,总体来说,速度上地突破还是吸引了很多工业界的关注的。
GT的设计
上面的很多方法其实出发点都是bbox这个矩形框冗余信息太多,目标信息少,大部分是背景。它们大多都改变了GT的定义,如CornerNet将其定义为角点,ExtremeNet将其定义为极值点,FCOS虽然还是矩形框但也使用了center-ness进行抑制,FSAF则将GT定义为中心区域。对于GT目标的改进优化促使了目标检测的发展。
参考文献
Densebox: Huang L, Yang Y, Deng Y, et al. Densebox: Unifying landmark localization with end to end object detection[J]. arXiv preprint arXiv:1509.04874, 2015.
YOLO: Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection[A]. Proceedings of the IEEE conference on computer vision and pattern recognition[C]. 2016: 779–788.
FCOS: Tian Z, Shen C, Chen H, et al. FCOS: Fully Convolutional One-Stage Object Detection[J]. arXiv:1904.01355 [cs], 2019.
FSAF: Zhu C, He Y, Savvides M. Feature Selective Anchor-Free Module for Single-Shot Object Detection[J]. arXiv:1903.00621 [cs], 2019.
CornerNet: Law H, Deng J. CornerNet: Detecting Objects as Paired Keypoints[J]. arXiv:1808.01244 [cs], 2019.
ExtremeNet: Zhou X, Zhuo J, Krähenbühl P. Bottom-up Object Detection by Grouping Extreme and Center Points[J]. arXiv:1901.08043 [cs], 2019.
CenterNet: Zhou X, Wang D, Krähenbühl P. Objects as points[A]. arXiv preprint arXiv:1904.07850[C]. 2019.