目录
- Rasa的安装和简单的测试
- 什么是Rasa:
- 安装Rasa:
- 测试自带的数据
- 查看项目里的文件内容
- 举一反三(自己的第一个机器人)
Rasa的安装和简单的测试
怪雨是新手,刚刚接触Rasa,以下内容不一定正确。有错误的地方欢迎指出。
什么是Rasa:
我的理解是一开源的机器学习框架用于AI助手和机器人。基于两个主要的模块
- NLU:自然语言理解(Natural Language Understanding,简称NLU)技术
- Core:核心 保存对话并决定下一步做什么
安装Rasa:
怪雨的系统:manjaro18+kde
安装前先更新同步数据库:sudo pacman -Syy
系统已经安装过以下内容的,可以跳过这一步(这一步也只是确保不会因为缺少什么而报错)
- 安装pip3sudo pacman -S python-pip
- 安装相关的依赖的python3的库pip install numpy pandas jieba sklearn
安装Rasa和Rasa-x 并初始化Rasa
pip install rasa-x --extra-index-url https://pypi.rasa.com/simple
rasa init
rasax就是Rasa 带界面的工具安装后终端运行rasax会自动弹出浏览器进入Rasax界面
测试自带的数据
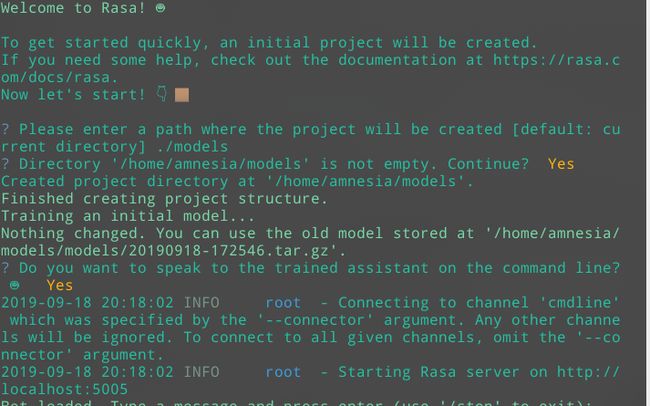
现在就可以测试自带的简单数据了
不过对话要按照自己编写的stories来对话
输入/stop就能推出Rasa shell
输入Rasa shell就能再次进入对话!
查看项目里的文件内容
创建一个项目:
rasa init --no-prompt不加后面的--no-prompt的话会详细的问你需要设置什么查看训练数据
- 可以通过
cat data/nlu.md来查看 (以下是markdown的格式)
## intent:affirm - yes - indeed - of course - that sounds good - correct ## intent:deny - no - never - I don't think so - don't like that - no way - not really ##后面是intents(意图) 就是以下的几条消息所要表达的意图
-后面跟的就是消息了
意思就是把这一组消息都是这一意图
- 可以通过
为你的模型配置
你可以通过
cat config.yml来查看配置文件# Configuration for Rasa NLU. # https://rasa.com/docs/rasa/nlu/components/ language: en pipeline: supervised_embeddings # Configuration for Rasa Core. # https://rasa.com/docs/rasa/core/policies/ policies: - name: MemoizationPolicy - name: KerasPolicy - name: MappingPolicy这些文件定义了你这个模型会使用的NLU和CORE组件
NLUpipeline的选择:
如果训练样例小于1000的 使用
pipeline: "pretrained_embeddings_spacy"如果训练样例大于1000的 使用
pipeline: "supervised_embeddings"以上两个是最重要的两个pipelines
编写自己的第一个Stories
这个文档是教你的助手如何去回应消息的
strories就是机器和用户的对话,core models通过真实的对话学习来训练自己。
同样
cat data/stories.md查看一下里面的内容(截取部分)## happy path * greet - utter_greet * mood_great - utter_happy ## sad path 1 * greet - utter_greet * mood_unhappy - utter_cheer_up - utter_did_that_help * affirm - utter_happy*greet* 后面的是用户发送的消息(语句的意图或是实体)- utter_greet- 后面是action (机器人需要执行的操作,可以是回一段消息或是自定义操作) action中如果是回消息的话需要 回话必须要以utter_开头且与domain里面定义的一致
如果是自定义操作虽然没有强制要求不过最好以action_开头
action这里还大有内容,后面学习了更新到后面的文章
定义一个Domain
[^]: 这里说域的话好像不太合适 保留英文Domain吧
老样子查看
cat domain.ymlintents: - greet - goodbye - affirm - deny - mood_great - mood_unhappy templates: utter_greet: - text: Hey! How are you? utter_cheer_up: - text: 'Here is something to cheer you up:' image: https://i.imgur.com/nGF1K8f.jpg utter_did_that_help: - text: Did that help you? utter_happy: - text: Great carry on! utter_goodbye: - text: Bye actions: - utter_greet - utter_cheer_up - utter_did_that_help - utter_happy - utter_goodbyeintents 你期待用户说的话(意图) actions 机器人能做的和能说的 templates 机器人回话模板 训练模型
每次一的更新内容,我们都需要重新训练我们的模型
执行下列代码
rasa train echo "Finished training."与机器人对话
执行
rasa shell
举一反三(自己的第一个机器人)
修改
data/nlu.md中加入中文截取内容如下
## intent:affirm - yes - indeed - of course - that sounds good - correct - 是的 - 当然 - 正确修改
cat config.yml的内容把
language: en改为language: zh修改
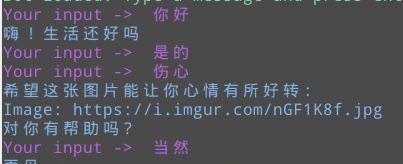
domain.yml内容修改templates: utter 的text的文本内容
templates: utter_greet: - text: 嗨!生活还好吗 utter_cheer_up: - text: '希望这张图片能让你心情有所好转:' image: https://i.imgur.com/nGF1K8f.jpg utter_did_that_help: - text: 对你有帮助吗? utter_happy: - text: 加油!继续! utter_goodbye: - text: 再见尝试训练
rasa train运行
rasa shell