python如何拟合三维平面(拟合Intel Realsense D435深度数据点)
文章目录
-
- 拟合Intel Realsense D435深度数据点
参考文章:【MQ笔记】超简单的最小二乘法拟合平面(Python)

import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 创建函数,用于生成不同属于一个平面的100个离散点
def not_all_in_plane(a, b, c):
x = np.random.uniform(-10, 10, size=100)
y = np.random.uniform(-10, 10, size=100)
z = (a * x + b * y + c) + np.random.normal(-1, 1, size=100)
return x, y, z
# 调用函数,生成离散点
x, y, z = not_all_in_plane(2, 5, 6)
#创建系数矩阵A
a = 0
A = np.ones((100, 3))
for i in range(0, 100):
A[i, 0] = x[a]
A[i, 1] = y[a]
a = a + 1
#print(A)
#创建矩阵b
b = np.zeros((100, 1))
a = 0
for i in range(0, 100):
b[i, 0] = z[a]
a = a + 1
#print(b)
#通过X=(AT*A)-1*AT*b直接求解
A_T = A.T
A1 = np.dot(A_T,A)
A2 = np.linalg.inv(A1)
A3 = np.dot(A2,A_T)
X= np.dot(A3, b)
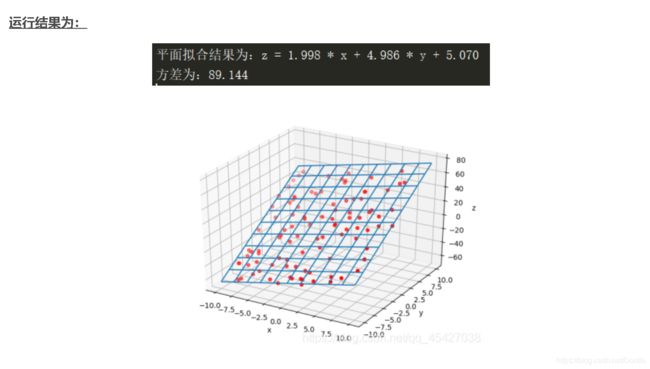
print('平面拟合结果为:z = %.3f * x + %.3f * y + %.3f'%(X[0,0],X[1,0],X[2,0]))
#计算方差
R=0
for i in range(0,100):
R=R+(X[0, 0] * x[i] + X[1, 0] * y[i] + X[2, 0] - z[i])**2
print ('方差为:%.*f'%(3,R))
# 展示图像
fig1 = plt.figure()
ax1 = fig1.add_subplot(111, projection='3d')
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.set_zlabel("z")
ax1.scatter(x,y,z,c='r',marker='o')
x_p = np.linspace(-10, 10, 100)
y_p = np.linspace(-10, 10, 100)
x_p, y_p = np.meshgrid(x_p, y_p)
z_p = X[0, 0] * x_p + X[1, 0] * y_p + X[2, 0]
ax1.plot_wireframe(x_p, y_p, z_p, rstride=10, cstride=10)
plt.show()


import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 创建函数,用于生成不同属于一个平面的100个离散点
def not_all_in_plane(a, b, c):
x = np.random.uniform(-10, 10, size=100)
y = np.random.uniform(-10, 10, size=100)
z = (a * x + b * y + c) + np.random.normal(-1,1,size=100)
return x, y, z
# 调用函数,生成离散点
x2, y2, z2 = not_all_in_plane(2, 5, 6)
#创建系数矩阵A
A=np.zeros((3,3))
for i in range(0,100):
A[0,0]=A[0,0]+x2[i]**2
A[0,1]=A[0,1]+x2[i]*y2[i]
A[0,2]=A[0,2]+x2[i]
A[1,0]=A[0,1]
A[1,1]=A[1,1]+y2[i]**2
A[1,2]=A[1,2]+y2[i]
A[2, 0] = A[0,2]
A[2, 1] = A[1, 2]
A[2, 2] = 100
#print(A)
#创建b
b = np.zeros((3,1))
for i in range(0,100):
b[0,0]=b[0,0]+x2[i]*z2[i]
b[1,0]=b[1,0]+y2[i]*z2[i]
b[2,0]=b[2,0]+z2[i]
#print(b)
#求解X
A_inv=np.linalg.inv(A)
X = np.dot(A_inv, b)
print('平面拟合结果为:z = %.3f * x + %.3f * y + %.3f'%(X[0,0],X[1,0],X[2,0]))
#计算方差
R=0
for i in range(0,100):
R=R+(X[0, 0] * x2[i] + X[1, 0] * y2[i] + X[2, 0] - z2[i])**2
print ('方差为:%.*f'%(3,R))
# 展示图像
fig1 = plt.figure()
ax1 = fig1.add_subplot(111, projection='3d')
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.set_zlabel("z")
ax1.scatter(x2,y2,z2,c='r',marker='o')
x_p = np.linspace(-10, 10, 100)
y_p = np.linspace(-10, 10, 100)
x_p, y_p = np.meshgrid(x_p, y_p)
z_p = X[0, 0] * x_p + X[1, 0] * y_p + X[2, 0]
ax1.plot_wireframe(x_p, y_p, z_p, rstride=10, cstride=10)
plt.show()
拟合Intel Realsense D435深度数据点
# -*- coding: utf-8 -*-
"""
@File : 摄像头精度测试.py
@Time : 2020/9/7 10:49
@Author : Dontla
@Email : [email protected]
@Software: PyCharm
"""
import datetime
import time
from datetime import date
import pyrealsense2 as rs
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from numba import jit
def fit_flat(x, y, z):
# 取样点数量
point_num = len(x)
print(point_num)
# 创建系数矩阵A
a = 0
A = np.ones((point_num, 3))
for i in range(0, point_num):
A[i, 0] = x[a]
A[i, 1] = y[a]
a = a + 1
# print(A)
# 创建矩阵b
b = np.zeros((point_num, 1))
a = 0
for i in range(0, point_num):
b[i, 0] = z[a]
a = a + 1
# print(b)
# 通过X=(AT*A)-1*AT*b直接求解
A_T = A.T
A1 = np.dot(A_T, A)
A2 = np.linalg.inv(A1)
A3 = np.dot(A2, A_T)
X = np.dot(A3, b)
print('平面拟合结果为:z = %.3f * x + %.3f * y + %.3f' % (X[0, 0], X[1, 0], X[2, 0]))
# 计算方差
R = 0
for i in range(0, point_num):
R = R + (X[0, 0] * x[i] + X[1, 0] * y[i] + X[2, 0] - z[i]) ** 2
print('方差为:%.*f' % (3, R))
# 展示图像
fig1 = plt.figure()
ax1 = fig1.add_subplot(111, projection='3d')
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.set_zlabel("z")
ax1.scatter(x, y, z, c='r', marker='o')
x_p = np.linspace(0, 1500, 150)
y_p = np.linspace(0, 1500, 150)
x_p, y_p = np.meshgrid(x_p, y_p)
z_p = X[0, 0] * x_p + X[1, 0] * y_p + X[2, 0]
ax1.plot_wireframe(x_p, y_p, z_p, rstride=10, cstride=10)
plt.show()
def run_cam():
ctx = rs.context()
pipeline = rs.pipeline(ctx)
cfg = rs.config()
cfg.enable_stream(rs.stream.depth, 1280, 720, rs.format.z16, 30)
cfg.enable_stream(rs.stream.color, 1280, 720, rs.format.bgr8, 30)
profile = pipeline.start(cfg)
try:
count = 0
while True:
fs = pipeline.wait_for_frames()
color_frame = fs.get_color_frame()
depth_frame = fs.get_depth_frame()
# print(type(depth_frame)) # 结果:
