视频学习
- GAN应用:图像着色,图像超像素,背景模糊,人脸生成,人脸定制,卡通头像生成,文本生成图片,字体变换,风格变换,图像修复,帧预测。
生成式对抗网络基础
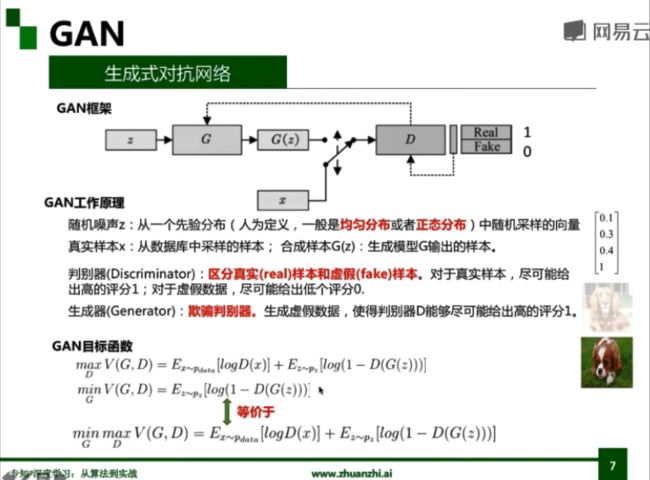
- 生成式对抗网络(GAN)
- 框架和目标函数
- 从博弈角度解释GAN
- 零和博弈
- 对抗学习
- 从概率角度分析GAN
- KL散度和JS散度
- 极大似然估计和最小化KL散度
- 数学分析
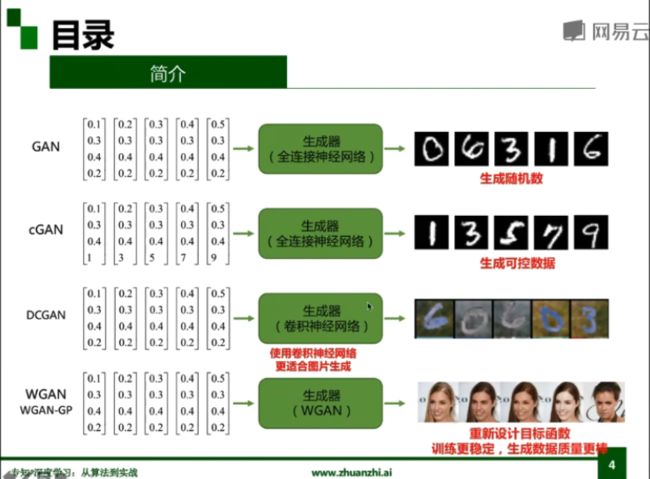
- 条件生成式对抗网络(Conditional GAN,cGAN)
- 改进的生成式对抗网络(Improved GAN)
- 卷积生成式对抗网络(Deep Convolutional GAN,DCGAN)
- Wasserstein GAN
- 原始GAN分析
- WGAN:权重截断(Weight Clipping)
- WGAN-GP:梯度惩罚(Gradient Penalty)
生成式对抗网络前沿
- 前沿方法
- 逐渐生成的生成式对抗网络(Progressive GAN)
- 普归一化生成式对抗网络(Spectral Normalization GAN,SNGAN)
- 自注意力生成式对抗网络(Self-Attention GAN,SAGAN)
- 前沿应用
- 行人再识别(Person Re-Identification,Re-ID)
- 图片生成解决数据缺乏难题
- 风格迁移解决训练集内部偏差问题
- 风格迁移解决跨数据集学习问题
- 对抗训练解决异构数据学习难题
生成式对抗网络实践
- 概念介绍
- U型网络(U-Net)
- 残差生成器(ResGenerator)
- 补丁GAN(PatchGAN)
- 实例正则化(Instance Normalization)
- Pixel2Pixel方法
- CycleGAN方法
- StarGAN方法
代码练习
生成式对抗网络(double moon)
一个简单的 GAN
生成器和判别器的结构都非常简单,具体如下:
- 生成器: 32 ==> 128 ==> 2
- 判别器: 2 ==> 128 ==> 1
生成器生成的是样本,即一组坐标(x,y),我们希望生成器能够由一组任意的 32组噪声生成座标(x,y)处于两个半月形状上。
判别器输入的是一组座标(x,y),最后一层是sigmoid函数,是一个范围在(0,1)间的数,即样本为真或者假的置信度。如果输入的是真样本,得到的结果尽量接近1;如果输入的是假样本,得到的结果尽量接近0。
import torch.nn as nn
z_dim = 32
hidden_dim = 128
# 定义生成器
net_G = nn.Sequential(
nn.Linear(z_dim,hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 2))
# 定义判别器
net_D = nn.Sequential(
nn.Linear(2,hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim,1),
nn.Sigmoid())
# 网络放到 GPU 上
net_G = net_G.to(device)
net_D = net_D.to(device)
# 定义网络的优化器
optimizer_G = torch.optim.Adam(net_G.parameters(),lr=0.0001)
optimizer_D = torch.optim.Adam(net_D.parameters(),lr=0.0001)
- 下面为对抗训练的过程:
把学习率修改为 0.001,batch_size改大到250(loss降低,改善效果)
# 定义网络的优化器
optimizer_G = torch.optim.Adam(net_G.parameters(),lr=0.001)
optimizer_D = torch.optim.Adam(net_D.parameters(),lr=0.001)
batch_size = 250
loss_D_epoch = []
loss_G_epoch = []
for e in range(nb_epochs):
np.random.shuffle(X)
real_samples = torch.from_numpy(X).type(torch.FloatTensor)
loss_G = 0
loss_D = 0
for t, real_batch in enumerate(real_samples.split(batch_size)):
# 固定生成器G,改进判别器D
# 使用normal_()函数生成一组随机噪声,输入G得到一组样本
z = torch.empty(batch_size,z_dim).normal_().to(device)
fake_batch = net_G(z)
# 将真、假样本分别输入判别器,得到结果
D_scores_on_real = net_D(real_batch.to(device))
D_scores_on_fake = net_D(fake_batch)
# 优化过程中,假样本的score会越来越小,真样本的score会越来越大,下面 loss 的定义刚好符合这一规律,
# 要保证loss越来越小,真样本的score前面要加负号
# 要保证loss越来越小,假样本的score前面是正号(负负得正)
loss = -torch.mean(torch.log(1-D_scores_on_fake) + torch.log(D_scores_on_real))
# 梯度清零
optimizer_D.zero_grad()
# 反向传播优化
loss.backward()
# 更新全部参数
optimizer_D.step()
loss_D += loss
# 固定判别器,改进生成器
# 生成一组随机噪声,输入生成器得到一组假样本
z = torch.empty(batch_size,z_dim).normal_().to(device)
fake_batch = net_G(z)
# 假样本输入判别器得到 score
D_scores_on_fake = net_D(fake_batch)
# 我们希望假样本能够骗过生成器,得到较高的分数,下面的 loss 定义也符合这一规律
# 要保证 loss 越来越小,假样本的前面要加负号
loss = -torch.mean(torch.log(D_scores_on_fake))
optimizer_G.zero_grad()
loss.backward()
optimizer_G.step()
loss_G += loss
if e % 50 ==0:
print(f'\n Epoch {e} , D loss: {loss_D}, G loss: {loss_G}')
loss_D_epoch.append(loss_D)
loss_G_epoch.append(loss_G)
Epoch 950 , D loss: 11.052919387817383, G loss: 5.581031799316406
-
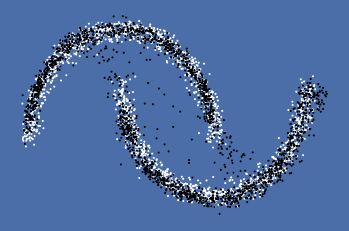
利用噪声生成一组数据观察一下:
z = torch.empty(n_samples,z_dim).normal_().to(device)
fake_samples = net_G(z)
fake_data = fake_samples.cpu().data.numpy()fig, ax = plt.subplots(1, 1, facecolor='#4B6EA9')
all_data = np.concatenate((X,fake_data),axis=0)
Y2 = np.concatenate((np.ones(n_samples),np.zeros(n_samples)))
plot_data(ax, all_data, Y2)
plt.show()
其中,白色的是原来的真实样本,黑色的点是生成器生成的样本。
CGAN 和 DCGAN
CGAN
首先实现CGAN。下面分别是 判别器 和 生成器 的网络结构,可以看出网络结构非常简单,具体如下:
- 生成器:(784 + 10) ==> 512 ==> 256 ==> 1
- 判别器:(100 + 10) ==> 128 ==> 256 ==> 512 ==> 784
可以看出,去掉生成器和判别器那 10 维的标签信息,和普通的GAN是完全一样的。下面是网络的具体实现代码:
class Discriminator(nn.Module):
'''全连接判别器,用于1x28x28的MNIST数据,输出是数据和类别'''
def __init__(self):
super(Discriminator, self).__init__()
self.model = nn.Sequential(
nn.Linear(28*28+10, 512),
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(512, 256),
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(256, 1),
nn.Sigmoid()
)
def forward(self, x, c):
x = x.view(x.size(0), -1)
validity = self.model(torch.cat([x, c], -1))
return validity
class Generator(nn.Module):
'''全连接生成器,用于1x28x28的MNIST数据,输入是噪声和类别'''
def __init__(self, z_dim):
super(Generator, self).__init__()
self.model = nn.Sequential(
nn.Linear(z_dim+10, 128),
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(128, 256),
nn.BatchNorm1d(256, 0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(256, 512),
nn.BatchNorm1d(512, 0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Linear(in_features=512, out_features=28*28),
nn.Tanh()
)
def forward(self, z, c):
x = self.model(torch.cat([z, c], dim=1))
x = x.view(-1, 1, 28, 28)
return x
-
下面定义相关的模型:
初始化构建判别器和生成器
discriminator = Discriminator().to(device)
generator = Generator(z_dim=z_dim).to(device)初始化二值交叉熵损失
bce = torch.nn.BCELoss().to(device)
ones = torch.ones(batch_size).to(device)
zeros = torch.zeros(batch_size).to(device)初始化优化器,使用Adam优化器
g_optimizer = optim.Adam(generator.parameters(), lr=learning_rate)
d_optimizer = optim.Adam(discriminator.parameters(), lr=learning_rate) -
开始训练:
开始训练,一共训练total_epochs
for epoch in range(total_epochs):
# torch.nn.Module.train() 指的是模型启用 BatchNormalization 和 Dropout # torch.nn.Module.eval() 指的是模型不启用 BatchNormalization 和 Dropout # 因此,train()一般在训练时用到, eval() 一般在测试时用到 generator = generator.train() # 训练一个epoch for i, data in enumerate(dataloader): # 加载真实数据 real_images, real_labels = data real_images = real_images.to(device) # 把对应的标签转化成 one-hot 类型 tmp = torch.FloatTensor(real_labels.size(0), 10).zero_() real_labels = tmp.scatter_(dim=1, index=torch.LongTensor(real_labels.view(-1, 1)), value=1) real_labels = real_labels.to(device) # 生成数据 # 用正态分布中采样batch_size个随机噪声 z = torch.randn([batch_size, z_dim]).to(device) # 生成 batch_size 个 ont-hot 标签 c = torch.FloatTensor(batch_size, 10).zero_() c = c.scatter_(dim=1, index=torch.LongTensor(np.random.choice(10, batch_size).reshape([batch_size, 1])), value=1) c = c.to(device) # 生成数据 fake_images = generator(z,c) # 计算判别器损失,并优化判别器 real_loss = bce(discriminator(real_images, real_labels), ones) fake_loss = bce(discriminator(fake_images.detach(), c), zeros) d_loss = real_loss + fake_loss d_optimizer.zero_grad() d_loss.backward() d_optimizer.step() # 计算生成器损失,并优化生成器 g_loss = bce(discriminator(fake_images, c), ones) g_optimizer.zero_grad() g_loss.backward() g_optimizer.step() # 输出损失 print("[Epoch %d/%d] [D loss: %f] [G loss: %f]" % (epoch, total_epochs, d_loss.item(), g_loss.item())) -
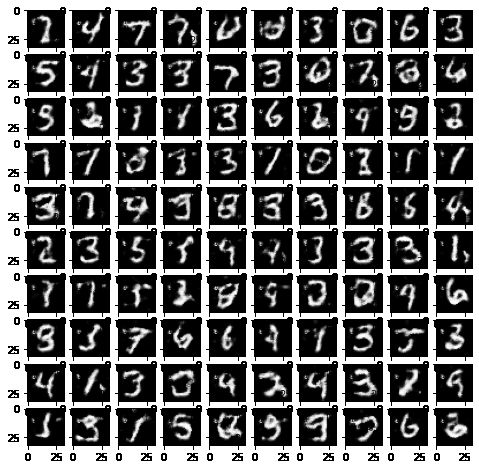
下面我们用随机噪声生成一组图像,看看CGAN的效果:
用于生成效果图
生成100个随机噪声向量
fixed_z = torch.randn([100, z_dim]).to(device)
生成100个one_hot向量,每类10个
fixed_c = torch.FloatTensor(100, 10).zero_()
fixed_c = fixed_c.scatter_(dim=1, index=torch.LongTensor(np.array(np.arange(0, 10).tolist()*10).reshape([100, 1])), value=1)
fixed_c = fixed_c.to(device)generator = generator.eval()
fixed_fake_images = generator(fixed_z, fixed_c)plt.figure(figsize=(8, 8))
for j in range(10):
for i in range(10):
img = fixed_fake_images[j10+i, 0, :, :].detach().cpu().numpy()
img = img.reshape([28, 28])
plt.subplot(10, 10, j10+i+1)
plt.imshow(img, 'gray')
考虑到上面代码是把图像直接拉成一个向量来处理,没有考虑空间上的特性,因此,效果理论上会不如使用卷积操作的 DCGAN。两者代码也非常类似,我们下面比较一下。
DCGAN
下面我们实现DCGAN。下面分别是 判别器 和 生成器 的网络结构,和之前类似,只是使用了卷积结构。
class D_dcgan(nn.Module):
'''滑动卷积判别器'''
def __init__(self):
super(D_dcgan, self).__init__()
self.conv = nn.Sequential(
# 第一个滑动卷积层,不使用BN,LRelu激活函数
nn.Conv2d(in_channels=1, out_channels=16, kernel_size=3, stride=2, padding=1),
nn.LeakyReLU(0.2, inplace=True),
# 第二个滑动卷积层,包含BN,LRelu激活函数
nn.Conv2d(in_channels=16, out_channels=32, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(32),
nn.LeakyReLU(0.2, inplace=True),
# 第三个滑动卷积层,包含BN,LRelu激活函数
nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(64),
nn.LeakyReLU(0.2, inplace=True),
# 第四个滑动卷积层,包含BN,LRelu激活函数
nn.Conv2d(in_channels=64, out_channels=128, kernel_size=4, stride=1),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.2, inplace=True)
)
# 全连接层+Sigmoid激活函数
self.linear = nn.Sequential(nn.Linear(in_features=128, out_features=1), nn.Sigmoid())
def forward(self, x):
x = self.conv(x)
x = x.view(x.size(0), -1)
validity = self.linear(x)
return validity
class G_dcgan(nn.Module):
'''反滑动卷积生成器'''
def __init__(self, z_dim):
super(G_dcgan, self).__init__()
self.z_dim = z_dim
# 第一层:把输入线性变换成256x4x4的矩阵,并在这个基础上做反卷机操作
self.linear = nn.Linear(self.z_dim, 4*4*256)
self.model = nn.Sequential(
# 第二层:bn+relu
nn.ConvTranspose2d(in_channels=256, out_channels=128, kernel_size=3, stride=2, padding=0),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
# 第三层:bn+relu
nn.ConvTranspose2d(in_channels=128, out_channels=64, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
# 第四层:不使用BN,使用tanh激活函数
nn.ConvTranspose2d(in_channels=64, out_channels=1, kernel_size=4, stride=2, padding=2),
nn.Tanh()
)
def forward(self, z):
# 把随机噪声经过线性变换,resize成256x4x4的大小
x = self.linear(z)
x = x.view([x.size(0), 256, 4, 4])
# 生成图片
x = self.model(x)
return x
-
定义相关的模型:
构建判别器和生成器
d_dcgan = D_dcgan().to(device)
g_dcgan = G_dcgan(z_dim=z_dim).to(device)def weights_init_normal(m):
classname = m.class.name
if classname.find('Conv') != -1:
torch.nn.init.normal_(m.weight.data, 0.0, 0.02)
elif classname.find('BatchNorm2d') != -1:
torch.nn.init.normal_(m.weight.data, 1.0, 0.02)
torch.nn.init.constant_(m.bias.data, 0.0)使用均值为0,方差为0.02的正态分布初始化神经网络
d_dcgan.apply(weights_init_normal)
g_dcgan.apply(weights_init_normal)初始化优化器,使用Adam优化器
g_dcgan_optim = optim.Adam(g_dcgan.parameters(), lr=learning_rate)
d_dcgan_optim = optim.Adam(d_dcgan.parameters(), lr=learning_rate)加载MNIST数据集,和之前不同的是,DCGAN输入的图像被 resize 成 32*32 像素
dcgan_dataloader = torch.utils.data.DataLoader(
datasets.MNIST('./data', train=True, download=True,
transform=transforms.Compose([transforms.Resize(32), transforms.ToTensor(),transforms.Normalize((0.5,), (0.5,))])
), batch_size, shuffle=True, drop_last=True) -
开始训练模型:
开始训练,一共训练 total_epochs
for e in range(total_epochs):
# 给generator启用 BatchNormalization g_dcgan = g_dcgan.train() # 训练一个epoch for i, data in enumerate(dcgan_dataloader): # 加载真实数据,不加载标签 real_images, _ = data real_images = real_images.to(device) # 用正态分布中采样batch_size个噪声,然后生成对应的图片 z = torch.randn([batch_size, z_dim]).to(device) fake_images = g_dcgan(z) # 计算判别器损失,并优化判别器 real_loss = bce(d_dcgan(real_images), ones) fake_loss = bce(d_dcgan(fake_images.detach()), zeros) d_loss = real_loss + fake_loss d_dcgan_optim.zero_grad() d_loss.backward() d_dcgan_optim.step() # 计算生成器损失,并优化生成器 g_loss = bce(d_dcgan(fake_images), ones) g_dcgan_optim.zero_grad() g_loss.backward() g_dcgan_optim.step() # 输出损失 print ("[Epoch %d/%d] [D loss: %f] [G loss: %f]" % (e, total_epochs, d_loss.item(), g_loss.item())) -
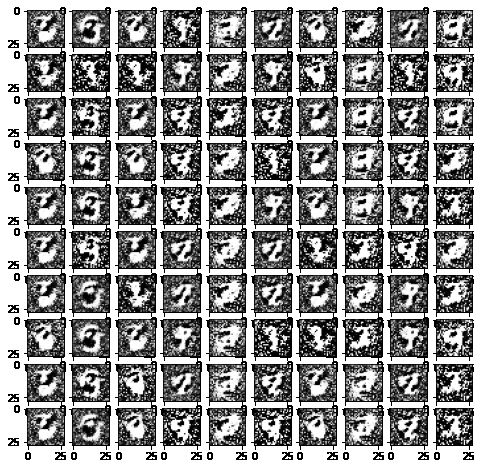
下面我们用一组随机噪声输出图像,看看DCGAN的效果:
用于生成效果图
生成100个随机噪声向量
fixed_z = torch.randn([100, z_dim]).to(device)
g_dcgan = g_dcgan.eval()
fixed_fake_images = g_dcgan(fixed_z)plt.figure(figsize=(8, 8))
for j in range(10):
for i in range(10):
img = fixed_fake_images[j10+i, 0, :, :].detach().cpu().numpy()
img = img.reshape([32, 32])
plt.subplot(10, 10, j10+i+1)
plt.imshow(img, 'gray')
这里只用了30个 epoch,效果还可以,如果增大 epoch 的数量,效果可能会更好。