- 00. 这里整理了最全的爬虫框架(Java + Python)
有一只柴犬
爬虫系列爬虫javapython
目录1、前言2、什么是网络爬虫3、常见的爬虫框架3.1、java框架3.1.1、WebMagic3.1.2、Jsoup3.1.3、HttpClient3.1.4、Crawler4j3.1.5、HtmlUnit3.1.6、Selenium3.2、Python框架3.2.1、Scrapy3.2.2、BeautifulSoup+Requests3.2.3、Selenium3.2.4、PyQuery3.2
- python-pcl函数_Python简介,第4章-函数
cumei1658
javawebglpythonluaios
python-pcl函数Runningthroughthedoor,Baldricfoundhimselfinanenormouscavern,itsceilinglostinshadow.Greatcolumnsofblackstonesoaredfromtheground,andpoolsoflavabubbledthroughout,lightingthecaverninadarkred.T
- java打印标签(机型TOSHIBA条码打印机B-EX4T)
嘘
JAVAjava
java打印标签实现方式标签效果代码获取更多相关资料实现rfid写入功能实现方式打印机设置网络ipjava获取socket连接,调用TPCL指令标签效果代码packageorg.jeecg.modules.invinfo.util;importorg.jeecg.modules.invinfo.vo.BatKcInventoryDetailVo;importorg.springframework.
- PCL 点云视窗类CloudViewer
LeonDL168
PCL算法计算机视觉人工智能视觉检测图像处理
点云视窗类CloudViewer是简单显示点云的可视化工具类,可以让用户用尽可能少的代码查看点云。注意:点云视窗类不能应用于多线程应用程序中。简单点云可视化如果用户想用几行代码可视化程序中所对应的地物,可以使用下面的代码:#include//...voidfoo(){pcl::PointCloud::Ptrcloud;//...为cloud添加对应的场景pcl::visualization::Cl
- PCL 怎样可视化深度图像
LeonDL168
PCL计算机视觉人工智能视觉检测图像处理算法
本小节讲解如何可视化深度图像的两种方法,在3D视窗中以点云形式进行可视化(深度图像来源于点云),另一种是,将深度值映射为颜色,从而以彩色图像方式可视化深度图像。代码首先,在PCL(PointCloudLearning)中国协助发行的书提供光盘的第7章例2文件夹中,打开名为range_image_visualization.cpp的代码文件,同文件夹下可以找到相关的测试点云文件room_scan1.
- WPF中图片的宫格显示
Vae_Mars
WPF-AI对话wpf
1.解释说明-使用ScrollViewer控件来达到滑动的效果-使用WrapPanel的自动换行特性,保证图片在占满横向空间后自动往下排布-使用foreach的方法来游历所有的图片url2.xaml代码示例3.cs代码示例//加载url转换成BitmapImageprivateasyncTaskLoadImageFromUrl(stringurl){try{using(HttpClientclie
- C# 网口通信(通过Sockets类)
萨达大
c#服务器网络网口通讯上位机
文章目录1.引入Sockets2.定义TcpClient3.连接网口4.发送数据5.关闭连接1.引入SocketsusingSystem.Net.Sockets;2.定义TcpClientprivateTcpClienttcpClient;//TcpClient实例privateNetworkStreamstream;//网络流,用于与服务器通信3.连接网口tcpClient=newTcpClie
- OkHttp搞定Http请求
头秃到底
文章目录OkHttp依赖包创建OkHttpClient构造UrlHeader头设定Get请求同步Get异步GetPost请求Json内容Form表单文件上传Put请求Json内容参数方式Delete请求OkHttp工具类OkHttp官方文档仓库OkHttp是一款高效的HTTP客户端框架:HTTP/2支持允许对同一主机的所有请求共享一个套接字。连接池可以减少请求延迟(如果HTTP/2不可用)。透明G
- Python | 获取PCD点云数据强度等信息
拟墨画扇_
Pythonpython开发语言
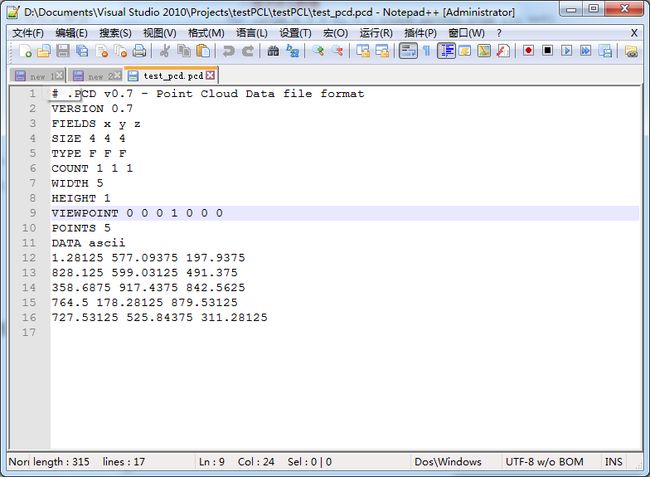
最近工作需要,需要获取PCD点云数据的强度等信息,给出open3d和pypcd两种方法获取强度信息。读取的PCD数据头格式如下:VERSION0.7FIELDSxyzintensitylaseridtimeoffsetyawangleSIZE4441284TYPEFFFUUFFCOUNT1111111WIDTH230400HEIGHT1VIEWPOINT0001000POINTS230400DAT
- 前端开发需要了解的算法知识
史努比的大头
算法前端
手写深拷贝functiondeepClone(obj){//处理基础数据类型和函数if(obj===null||typeofobj!=='object'){returnobj;}//处理数组if(Array.isArray(obj)){returnobj.map(item=>deepClone(item));}//处理对象constclonedObj={};for(constkeyinobj){i
- tomcat启动报错 Failed to introspect Class [org.mybatis.spring.SqlSessionFactoryBean]
alike_meng
小操作tomcatmybatisspring
java.lang.IllegalStateException:FailedtointrospectClass[org.mybatis.spring.SqlSessionFactoryBean]fromClassLoader[ParallelWebappClassLoaderpom.xml里面的一些依赖不兼容。我之前都是用的最新版的依赖,就报这个错。然后所有依赖都改成了跟教学视频一样的版本就不报错
- App Cleaner & Uninstaller Pro中文---彻底卸载Mac应用的利器
lx53mac
Mac软件macos
AppCleaner&UninstallerPro是一款专为Mac用户设计的强大应用程序清理和卸载工具。它以其全面、彻底和高效的清理能力,受到了广大用户的青睐。该软件不仅能帮助用户快速卸载不再需要的应用程序,更能彻底删除相关文件、插件和残留数据,确保Mac磁盘空间得到高效释放。AppCleaner&UninstallerPro的特色功能包括其强大的搜索能力,能快速定位并清除与应用程序相关的所有文件
- python unittest TypeError setUpClass missing 1 required positional argument cls
Kelly雨薇
python框架
pythonunittest框架使用可以用两种方法:(1)所有内容写在一个python文件里eg:https://blog.csdn.net/panyueke/article/details/85305223(2)function与主框架隔离eg:functions.pydeffun_div(x):returnx/2deffun_add(x):returnx+2deffun_minus(x):re
- android 下载txt,Android 下载文件(使用OKHttp)
weixin_39942492
android下载txt
finallongstartTime=System.currentTimeMillis();OkHttpClientokHttpClient=newOkHttpClient();Requestrequest=newRequest.Builder().url(url).addHeader("Connection","close").build();okHttpClient.newCall(reque
- 接口测试06 -- pytest接口自动化封装&Loggin实战
糯米不开花ぴ
软件测试python进阶python
1.接口关键字封装1.1基本概念接口关键字封装是指:将接口测试过程中常用的操作、验证封装成可复用的关键字(或称为函数、方法),以提高测试代码的可维护性和可复用性。1.2常见的接口关键字封装方式1.发送请求:封装一个函数,接受参数如请求方法、URL、请求头、请求体等,使用相应的库发送请求,如requests库或HttpClient库。---------------->>>>
- 【前端小技巧】不同组件中如何实现点击空白关闭自定义的弹窗
Luxine.
前端分享前端
直接上代码吧处理函数closest的参数是弹窗的类名consthandleClickOutside=(event:MouseEvent)=>{consttarget=event.targetasHTMLElement;if(!target.closest('.popUpClassName')){//控制弹窗显示隐藏的变量ispopup.value=false;}};绑定到document上docu
- Rust使用之【宏】
拐几个弯
RUST笔记rust开发语言后端
一、简单使用clapclap={version="4.5.17",features=["derive"]}其中,什么是features=["derive"]:表示你希望在添加clap依赖时启用derive特性。这通常意味着你希望使用clap的派生(derive)宏功能,这些功能可以简化创建命令行接口的代码。例如,derive特性可以让你使用#[derive(Parser)]来自动生成解析命令行参数
- java后端如何发送http请求
Lzehui
javahttp开发语言
用java后端发送请求需要用到的一个工具包为HttpClient。HttpClient是Apache的一个子项目,是高效的、功能丰富的支持HTTP协议的客户端编程工具包。引入依赖org.apache.httpcomponentshttpclient4.5.13发送GET请求后面附有代码示例第一步:用HttpClients的createDefault()方法,创建httpclient对象,用于后续发
- 栈和帧指针使用方法
greedyhao
反汇编栈帧
这篇主要是围绕SPFPPCLR寄存器进行介绍,不理解的可以一起讨论下,我也是今天才开始学习这些汇编基础知识处理器寄存器被指定为R0、R1等。MOVE指令的源位于左侧,目标位于右侧。伪处理程序中的堆栈从高地址增长到低地址。因此,push会导致堆栈指针的递减。pop会导致堆栈指针的增量。寄存器sp(stackpointer)用于指向堆栈。寄存器fp(framepointer)用作帧指针。帧指针充当被调
- android 网络图片工具类,Android处理网络和图片的工具类详解
weixin_39787594
android网络图片工具类
1:网络的底层环境采用apache的httpClient链接池框架2:图片缓存采用基于LRU的算法3:网络接口采用监听者模式4包含图片的OOM处理(及时回收处理技术的应用)importjava.io.FilterInputStream;importjava.io.IOException;importjava.io.InputStream;importjava.lang.ref.SoftRefere
- 『点云处理任务 』用PCL库 还是 深度学习模型?
爱钓鱼的歪猴
点云深度学习人工智能pcl库
深度学习和PCL库都可以用来做点云处理任务,但是二者侧重点有所不同。1、PCL库(点云库)是一个专门用于点云处理和三维几何分析的开源类库,常用于以下任务:1、点云滤波:用于去除噪音、下采样和平滑等操作,入统计滤波、体素滤波和高斯滤波等。2、特征提取和描述:用于捕获地点云数据的表面特征,入法线估计、曲率计算、局部特征描述子(如FPFH、SHOT)等。3、点云配准:,用于将不同视角或不同时间的点云数据
- Java HttpClient库的使用
m2fox
简介HttpClient是Apache的一个开源库,相比于JDK自带的URLConnection等,使用起来更灵活方便。使用方法可以大致分为如下八步曲:创建一个HttpClient对象;创建一个Http请求对象并设置请求的URL,比如GET请求就创建一个HttpGet对象,POST请求就创建一个HttpPost对象;如果需要可以设置请求对象的请求头参数,也可以往请求对象中添加请求参数;调用Http
- DHCP分配IP地址详细流程讲解(附图,建议PC观看)
冯富江的技术博客
tcp/ip网络协议网络DHCP分配IP地址
目录一、DHCP分配IP地址流程:第一步:DHCPClient请求IP——DHCPClient以广播的方式发出DHCPDiscover报文第二步:server响应——DHCPServer向DHCPClient发送一个DHCPOffer报文第三步:DHCPClient选择IP——DHCPClient会发出一个广播的DHCPRequest报文,在选项字段中会加入选中的DHCPServer的IP地址和需
- TCP——如何用类封装 socket 实现客户端和服务端通信(代码逐行详解)
王十二er
网络编程基础tcp/ip网络服务器
封装socket客户端部分一、完整代码客户端服务器端二、代码解析——客户端1.头文件和命名空间2.ctcpclient类定义构造函数析构函数成员函数总结3.成员函数解析3.1connect函数逐行解析——第一步:创建客户端的socket逐行解析——第2步:向服务器发起连接请求逐行解析——把域名/主机名/字符串格式的IP转换成结构体逐行解析——向服务端发起连接请求3.2send函数3.3recv函数
- c++ pcl 法向量 转机器人欧拉角
冰块啫喱水
机器人算法人工智能
一个向量是无法计算出机器人的姿态的,可以将该法向量作为机器人的z方向向量,然后指定x方向向量,一般为(0,0,-1)用于焊接姿态,具体需要什么姿态调节x的向量即可,然后根据右手定则知道y方向向量,最后调用eulerAngles方法计算出欧拉角,具体代码如下:1,向量转换矩阵Eigen::Matrix4fpclfunction::vectorToMatrix(constEigen::Vector3f
- 移动端网络框架--基于valley实现
Amrecs
androidvalley框架网络框架移动
说明:在开发Android项目时自己写的一个网络连接框架,基于valley框架的使用建立了一个支持多线程的、异步下载的、多数据格式的网络框架valley简介:在这之前,我们在程序中需要和网络通信的时候,大体使用的东西莫过于AsyncTaskLoader,HttpURLConnection,AsyncTask,HTTPClient(Apache)等,今年的GoogleI/O2013上,Volley发
- OpenFeign 学习笔记
szc1767
#springcloud学习笔记
目录定义、使用超时控制重试配置配置请求压缩日志打印功能修改默认httpClien(修改为httpclient5)参考:定义、使用是一个声明式的web服务客户端;只需要创建一个Rest接口并在该接口上添加注解@FeignClient即可1、添加依赖org.springframework.cloudspring-cloud-starter-openfeign2、在SpringBoot应用程序的主类上添
- 【springboot进阶】RestTemplate集成okhttp3并自定义日志打印
reui
springboot进阶应用springbootjavaspring
目录一、依赖二、配置创建RestTemplate配置类1.实例化OkHttp3客户端2.实例化RestTemplate模板创建拦截器加入拦截器三、效果传统的java开发中,我们通常使用的连接工具为HttpClient,使用起来比较复杂,新手容易出问题。而spring框架提供的RestTemplate类可用于在应用中调用rest服务,它简化了与http服务的通信方式,以一种更优雅的方式实现远程调用。
- 精通 Spring Cloud Feign:从理论到实战的通信优化之路
TopicOnline
springcloud
一、服务间调用的几种方式使用SpringCloud开发微服务时,在服务消费者调用服务提供者时,底层通过HTTPClient的方式访问。但实际上在服务调用时,有主要以下来实现:使用JDK原生的URLConnection;Apache提供的HTTPClient;Netty提供的异步HTTPClient;Spring提供的RestTemplate。SpringCloud的SpringCloudOpenF
- hadoopsdk使用_使用 .NET SDK 管理 HDInsight 中的 Apache Hadoop 群集
weixin_39862484
hadoopsdk使用
您现在访问的是微软AZURE全球版技术文档网站,若需要访问由世纪互联运营的MICROSOFTAZURE中国区技术文档网站,请访问https://docs.azure.cn.使用.NETSDK管理HDInsight中的ApacheHadoop群集ManageApacheHadoopclustersinHDInsightbyusing.NETSDK05/14/2018本文内容了解如何使用HDInsig
- Java常用排序算法/程序员必须掌握的8大排序算法
cugfy
java
分类:
1)插入排序(直接插入排序、希尔排序)
2)交换排序(冒泡排序、快速排序)
3)选择排序(直接选择排序、堆排序)
4)归并排序
5)分配排序(基数排序)
所需辅助空间最多:归并排序
所需辅助空间最少:堆排序
平均速度最快:快速排序
不稳定:快速排序,希尔排序,堆排序。
先来看看8种排序之间的关系:
1.直接插入排序
(1
- 【Spark102】Spark存储模块BlockManager剖析
bit1129
manager
Spark围绕着BlockManager构建了存储模块,包括RDD,Shuffle,Broadcast的存储都使用了BlockManager。而BlockManager在实现上是一个针对每个应用的Master/Executor结构,即Driver上BlockManager充当了Master角色,而各个Slave上(具体到应用范围,就是Executor)的BlockManager充当了Slave角色
- linux 查看端口被占用情况详解
daizj
linux端口占用netstatlsof
经常在启动一个程序会碰到端口被占用,这里讲一下怎么查看端口是否被占用,及哪个程序占用,怎么Kill掉已占用端口的程序
1、lsof -i:port
port为端口号
[root@slave /data/spark-1.4.0-bin-cdh4]# lsof -i:8080
COMMAND PID USER FD TY
- Hosts文件使用
周凡杨
hostslocahost
一切都要从localhost说起,经常在tomcat容器起动后,访问页面时输入http://localhost:8088/index.jsp,大家都知道localhost代表本机地址,如果本机IP是10.10.134.21,那就相当于http://10.10.134.21:8088/index.jsp,有时候也会看到http: 127.0.0.1:
- java excel工具
g21121
Java excel
直接上代码,一看就懂,利用的是jxl:
import java.io.File;
import java.io.IOException;
import jxl.Cell;
import jxl.Sheet;
import jxl.Workbook;
import jxl.read.biff.BiffException;
import jxl.write.Label;
import
- web报表工具finereport常用函数的用法总结(数组函数)
老A不折腾
finereportweb报表函数总结
ADD2ARRAY
ADDARRAY(array,insertArray, start):在数组第start个位置插入insertArray中的所有元素,再返回该数组。
示例:
ADDARRAY([3,4, 1, 5, 7], [23, 43, 22], 3)返回[3, 4, 23, 43, 22, 1, 5, 7].
ADDARRAY([3,4, 1, 5, 7], "测试&q
- 游戏服务器网络带宽负载计算
墙头上一根草
服务器
家庭所安装的4M,8M宽带。其中M是指,Mbits/S
其中要提前说明的是:
8bits = 1Byte
即8位等于1字节。我们硬盘大小50G。意思是50*1024M字节,约为 50000多字节。但是网宽是以“位”为单位的,所以,8Mbits就是1M字节。是容积体积的单位。
8Mbits/s后面的S是秒。8Mbits/s意思是 每秒8M位,即每秒1M字节。
我是在计算我们网络流量时想到的
- 我的spring学习笔记2-IoC(反向控制 依赖注入)
aijuans
Spring 3 系列
IoC(反向控制 依赖注入)这是Spring提出来了,这也是Spring一大特色。这里我不用多说,我们看Spring教程就可以了解。当然我们不用Spring也可以用IoC,下面我将介绍不用Spring的IoC。
IoC不是框架,她是java的技术,如今大多数轻量级的容器都会用到IoC技术。这里我就用一个例子来说明:
如:程序中有 Mysql.calss 、Oracle.class 、SqlSe
- 高性能mysql 之 选择存储引擎(一)
annan211
mysqlInnoDBMySQL引擎存储引擎
1 没有特殊情况,应尽可能使用InnoDB存储引擎。 原因:InnoDB 和 MYIsAM 是mysql 最常用、使用最普遍的存储引擎。其中InnoDB是最重要、最广泛的存储引擎。她 被设计用来处理大量的短期事务。短期事务大部分情况下是正常提交的,很少有回滚的情况。InnoDB的性能和自动崩溃 恢复特性使得她在非事务型存储的需求中也非常流行,除非有非常
- UDP网络编程
百合不是茶
UDP编程局域网组播
UDP是基于无连接的,不可靠的传输 与TCP/IP相反
UDP实现私聊,发送方式客户端,接受方式服务器
package netUDP_sc;
import java.net.DatagramPacket;
import java.net.DatagramSocket;
import java.net.Ine
- JQuery对象的val()方法执行结果分析
bijian1013
JavaScriptjsjquery
JavaScript中,如果id对应的标签不存在(同理JAVA中,如果对象不存在),则调用它的方法会报错或抛异常。在实际开发中,发现JQuery在id对应的标签不存在时,调其val()方法不会报错,结果是undefined。
- http请求测试实例(采用json-lib解析)
bijian1013
jsonhttp
由于fastjson只支持JDK1.5版本,因些对于JDK1.4的项目,可以采用json-lib来解析JSON数据。如下是http请求的另外一种写法,仅供参考。
package com;
import java.util.HashMap;
import java.util.Map;
import
- 【RPC框架Hessian四】Hessian与Spring集成
bit1129
hessian
在【RPC框架Hessian二】Hessian 对象序列化和反序列化一文中介绍了基于Hessian的RPC服务的实现步骤,在那里使用Hessian提供的API完成基于Hessian的RPC服务开发和客户端调用,本文使用Spring对Hessian的集成来实现Hessian的RPC调用。
定义模型、接口和服务器端代码
|---Model
&nb
- 【Mahout三】基于Mahout CBayes算法的20newsgroup流程分析
bit1129
Mahout
1.Mahout环境搭建
1.下载Mahout
http://mirror.bit.edu.cn/apache/mahout/0.10.0/mahout-distribution-0.10.0.tar.gz
2.解压Mahout
3. 配置环境变量
vim /etc/profile
export HADOOP_HOME=/home
- nginx负载tomcat遇非80时的转发问题
ronin47
nginx负载后端容器是tomcat(其它容器如WAS,JBOSS暂没发现这个问题)非80端口,遇到跳转异常问题。解决的思路是:$host:port
详细如下:
该问题是最先发现的,由于之前对nginx不是特别的熟悉所以该问题是个入门级别的:
? 1 2 3 4 5
- java-17-在一个字符串中找到第一个只出现一次的字符
bylijinnan
java
public class FirstShowOnlyOnceElement {
/**Q17.在一个字符串中找到第一个只出现一次的字符。如输入abaccdeff,则输出b
* 1.int[] count:count[i]表示i对应字符出现的次数
* 2.将26个英文字母映射:a-z <--> 0-25
* 3.假设全部字母都是小写
*/
pu
- mongoDB 复制集
开窍的石头
mongodb
mongo的复制集就像mysql的主从数据库,当你往其中的主复制集(primary)写数据的时候,副复制集(secondary)会自动同步主复制集(Primary)的数据,当主复制集挂掉以后其中的一个副复制集会自动成为主复制集。提供服务器的可用性。和防止当机问题
mo
- [宇宙与天文]宇宙时代的经济学
comsci
经济
宇宙尺度的交通工具一般都体型巨大,造价高昂。。。。。
在宇宙中进行航行,近程采用反作用力类型的发动机,需要消耗少量矿石燃料,中远程航行要采用量子或者聚变反应堆发动机,进行超空间跳跃,要消耗大量高纯度水晶体能源
以目前地球上国家的经济发展水平来讲,
- Git忽略文件
Cwind
git
有很多文件不必使用git管理。例如Eclipse或其他IDE生成的项目文件,编译生成的各种目标或临时文件等。使用git status时,会在Untracked files里面看到这些文件列表,在一次需要添加的文件比较多时(使用git add . / git add -u),会把这些所有的未跟踪文件添加进索引。
==== ==== ==== 一些牢骚
- MySQL连接数据库的必须配置
dashuaifu
mysql连接数据库配置
MySQL连接数据库的必须配置
1.driverClass:com.mysql.jdbc.Driver
2.jdbcUrl:jdbc:mysql://localhost:3306/dbname
3.user:username
4.password:password
其中1是驱动名;2是url,这里的‘dbna
- 一生要养成的60个习惯
dcj3sjt126com
习惯
一生要养成的60个习惯
第1篇 让你更受大家欢迎的习惯
1 守时,不准时赴约,让别人等,会失去很多机会。
如何做到:
①该起床时就起床,
②养成任何事情都提前15分钟的习惯。
③带本可以随时阅读的书,如果早了就拿出来读读。
④有条理,生活没条理最容易耽误时间。
⑤提前计划:将重要和不重要的事情岔开。
⑥今天就准备好明天要穿的衣服。
⑦按时睡觉,这会让按时起床更容易。
2 注重
- [介绍]Yii 是什么
dcj3sjt126com
PHPyii2
Yii 是一个高性能,基于组件的 PHP 框架,用于快速开发现代 Web 应用程序。名字 Yii (读作 易)在中文里有“极致简单与不断演变”两重含义,也可看作 Yes It Is! 的缩写。
Yii 最适合做什么?
Yii 是一个通用的 Web 编程框架,即可以用于开发各种用 PHP 构建的 Web 应用。因为基于组件的框架结构和设计精巧的缓存支持,它特别适合开发大型应
- Linux SSH常用总结
eksliang
linux sshSSHD
转载请出自出处:http://eksliang.iteye.com/blog/2186931 一、连接到远程主机
格式:
ssh name@remoteserver
例如:
ssh
[email protected]
二、连接到远程主机指定的端口
格式:
ssh name@remoteserver -p 22
例如:
ssh i
- 快速上传头像到服务端工具类FaceUtil
gundumw100
android
快速迭代用
import java.io.DataOutputStream;
import java.io.File;
import java.io.FileInputStream;
import java.io.FileNotFoundException;
import java.io.FileOutputStream;
import java.io.IOExceptio
- jQuery入门之怎么使用
ini
JavaScripthtmljqueryWebcss
jQuery的强大我何问起(个人主页:hovertree.com)就不用多说了,那么怎么使用jQuery呢?
首先,下载jquery。下载地址:http://hovertree.com/hvtart/bjae/b8627323101a4994.htm,一个是压缩版本,一个是未压缩版本,如果在开发测试阶段,可以使用未压缩版本,实际应用一般使用压缩版本(min)。然后就在页面上引用。
- 带filter的hbase查询优化
kane_xie
查询优化hbaseRandomRowFilter
问题描述
hbase scan数据缓慢,server端出现LeaseException。hbase写入缓慢。
问题原因
直接原因是: hbase client端每次和regionserver交互的时候,都会在服务器端生成一个Lease,Lease的有效期由参数hbase.regionserver.lease.period确定。如果hbase scan需
- java设计模式-单例模式
men4661273
java单例枚举反射IOC
单例模式1,饿汉模式
//饿汉式单例类.在类初始化时,已经自行实例化
public class Singleton1 {
//私有的默认构造函数
private Singleton1() {}
//已经自行实例化
private static final Singleton1 singl
- mongodb 查询某一天所有信息的3种方法,根据日期查询
qiaolevip
每天进步一点点学习永无止境mongodb纵观千象
// mongodb的查询真让人难以琢磨,就查询单天信息,都需要花费一番功夫才行。
// 第一种方式:
coll.aggregate([
{$project:{sendDate: {$substr: ['$sendTime', 0, 10]}, sendTime: 1, content:1}},
{$match:{sendDate: '2015-
- 二维数组转换成JSON
tangqi609567707
java二维数组json
原文出处:http://blog.csdn.net/springsen/article/details/7833596
public class Demo {
public static void main(String[] args) { String[][] blogL
- erlang supervisor
wudixiaotie
erlang
定义supervisor时,如果是监控celuesimple_one_for_one则删除children的时候就用supervisor:terminate_child (SupModuleName, ChildPid),如果shutdown策略选择的是brutal_kill,那么supervisor会调用exit(ChildPid, kill),这样的话如果Child的behavior是gen_