驱动开发(13)IRP 的异步完成和 CancelRoutine
本博文由CSDN博主zuishikonghuan所作,版权归zuishikonghuan所有,转载请注明出处:http://blog.csdn.net/zuishikonghuan/article/details/51301922
在之前的博文中,我们对于IRP,都是同步完成的,但是 Windows 对异步操作很友好,我们来看看如何异步完成 IRP 。
在应用程序中异步访问设备
在开始之前,我认为有必要提一句异步访问设备。在之前的博文中,与驱动通信的代码都是采用同步访问设备的,其实所谓同步访问,是 Win32 子系统封装了“等待”这一过程。 Win32API 会在内部创建事件,并在向设备发送 I/O 请求后直接等待事件被完成,一旦驱动程序完成 I/O ,那么就会激活事件,从而使 Win32API 中的等待状态结束,线程恢复运行。(关于“事件”对象,见上一篇博文“内核中开启多线程和同步对象”)
其实,这个等待操作我们可以自己来做,就像这样:
#include "stdafx.h"
#include当然,还有一种方法异步访问设备,即使用ReadFileEx/WriteFileEx,这是通过APC来实现异步访问的,这里不展开了。
为什么要说异步访问设备呢,这是为了避免大家和下面的异步完成IRP产生混淆,同时也有必要让大家明白下 Win32 子系统对同步读写设备的实现,同时,了解异步访问设备有助于下面的对派遣函数和IRP相关内容的理解。
要异步访问设备,需要得到驱动程序的支持,当应用程序调用 I/O 函数时,驱动程序的 Dispatch Function 会被调用,当 Dispatch Function 返回时,应用程序的 I/O 函数才能退出。驱动程序调用 IoMarkIrpPending 并返回 STATUS_PENDING 时,意味着 I/O 请求已经挂起,如果此时应用程序选择了异步访问设备,那么 I/O 函数会退出,当 I/O 真正处理完成时(即调用 IoCompleteRequest ),应用程序创建的 Event 就会被激发!WaitForSingleObject 会返回。而同步访问,其实是在 I/O 函数内部创建并等待了这个事件。
异步完成 IRP
要异步完成IRP,需要在派遣函数中不调用 IoCompleteRequest ,而是调用 IoMarkIrpPending 函数,同时需要派遣函数返回 STATUS_PENDING
通过上面的异步访问设备我们可以发现,应用程序会创建一个 Event 对象,要使应用程序等待完成,需要激活这个事件,这个过程不需要驱动程序自己去做的,完成IRP时如果调用 IoCompleteRequest , IoCompleteRequest 会自动激活此事件。
也就是说,调用 IoMarkIrpPending 后,应用程序创建的事件并没有被激活,即,如果应用程序等待此事件(如同步读写),并不会使其退出等待,他的作用仅仅是使派遣函数返回,以便于驱动程序在其他地方完成 IRP 。
就像这样,之后,此 IRP 被挂起,驱动程序可以保存此 IRP 的指针,在未来某个必要的时刻完成他:
//in a Dispatch Function
IoMarkIrpPending(pIrp);
return STATUS_PENDING;CancelRoutine 取消 I/O 例程
有些时候,驱动程序需要允许应用程序“取消”某个 I/O 请求。比如,应用程序程序异步读写文件时可以实现一个“终止”按钮。这需要驱动程序的支持。如果我们希望给自己的设备实现这种功能,就需要给 IRP 设置取消例程。应用程序通过 Win32 子系统提供的 CancelIO API来取消一个 I/O 请求,这会调用驱动程序设置的取消例程。
设置取消例程的内核函数是 IoSetCancelRoutine,这个函数的原型如下:
PDRIVER_CANCEL IoSetCancelRoutine(
_In_ PIRP Irp,
_In_ PDRIVER_CANCEL CancelRoutine
);- 参数1是要设置取消例程的 IRP 指针。
- 参数2是取消例程指针。如果此参数为 NULL ,则删除取消例程
返回值:当前 IRP 存在取消例程时返回 Irp->CancelRoutine ,否则返回 NULL 。
取消例程的原型如下:
DRIVER_CANCEL Cancel;
VOID Cancel(
_Inout_ struct _DEVICE_OBJECT *DeviceObject,
_Inout_ struct _IRP *Irp
)
{ ... }IoCancelIrp 会在内部调用 IoAcquireCancelSpinLock 获取cancel自旋锁,因此,在取消例程中,必须调用 IoReleaseCancelSpinLock 函数释放自旋锁,否则会导致蓝屏死机。
IRP 异步完成和 CancelRoutine 例程代码
最后,我们以一个例程来结束本篇博文,此例中,我们在处理”读”的派遣函数中挂起 IRP 来演示 IRP 异步完成,并设置 CancelRoutine ,并在取消例程中将挂起的 IRP 完成。
应用程序源码:
#include "stdafx.h"
#include驱动程序源码:
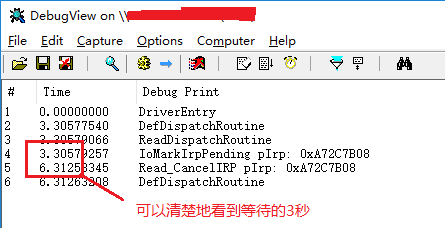
#include 效果图: