基于红外遥控的arduino遥控小车
遥控小车是每个人童年的最爱,不仅好奇它的奇妙,更是喜欢它带来的刺激。小编为大家带来几篇博客,来给大家讲讲制作遥控小车的程序。
看大标题可知我们一共有五个方法去制作一款带有遥控功能的小车,小编分开来给大家讲解。
本文是基于arduino的红外遥控小车
基于arduino的手机蓝牙遥控小车
基于arduino的红外遥控小车
基于arduino的无线NRF24L01遥控小车
基于ardunio的无线手柄遥控小车
基于ardunio的有线手柄遥控小车
从0到1教你做:基于红外遥控模块的Arduino的遥控小车
bilibili:https://www.bilibili.com/video/av74669242/
腾讯视频:https://v.qq.com/x/page/a301789lmwp.html
1、CSDN下载:
https://download.csdn.net/download/qq_38351824/11107043
2、可以关注点赞并在下方评论,我给你邮箱发过去。
3、关注微信公众号下载:
① 关注微信公众号:Tech云
②

红外遥控小车,用的就是遥控器来控制小车的移动,遥控部分分为发射端和接收端。如下图


第一个是遥控器为发射端,第二个为接收端。
我们只需要记录下来每个按键对应的码值,然后就可以像按键那样写程序啦,就是if(串口接收到是) 那么......
那么如何测出每个按键的码值呢?
我们先来连接线路吧
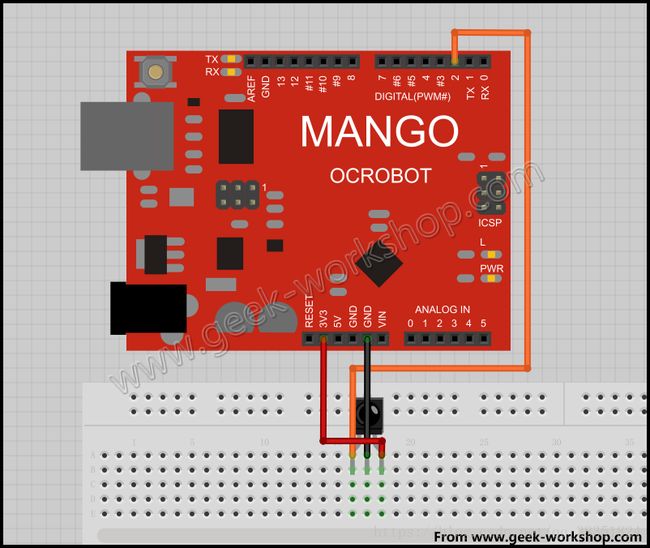
一、接线:
(1)红外遥控接线:

(2)电机接线:
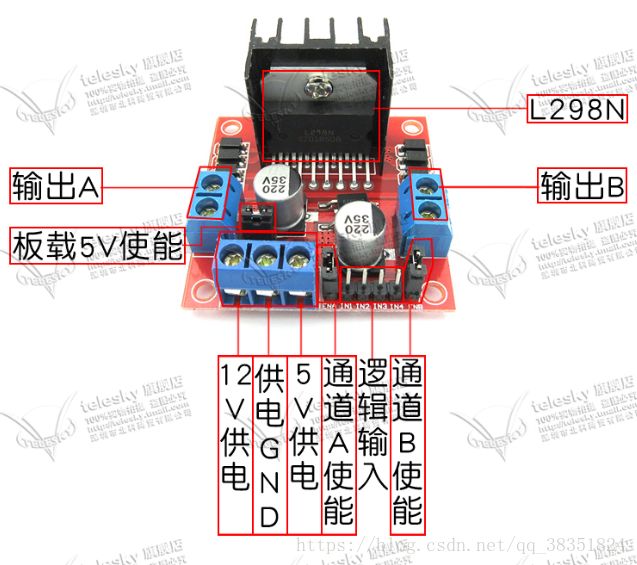
四个逻辑通道从左到右(即IN1到IN4)分别接5、6、9、10
12v供电,5伏输出给arduino供电
注意:此处驱动一定要和arduino共地!!!否则无法传输数据。
输出A接左边电机,输出B做右边电机
二、书写代码:
然后复制以下代码到编译器:
#include // 使用IRRemote函数库
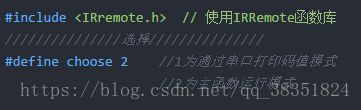
///选择///
#define choose 2 //1为通过串口打印码值模式
//2为主函数运行模式
//-------------------------------------------------------------------//
//*******************************************************************//
///
//电机设置/
///
#define leftA_PIN 5
#define leftB_PIN 6
#define righA_PIN 9
#define righB_PIN 10
void motor_pinint( ); //引脚初始化
void forward( ); //前进
void back( ); //后退
void turnLeftOrigin( ); //原地左
void turnRightOrigin( ); //原地右
void turnRightforword( ); //右前
void turnLeftforword( ); //左前
void turnLeftback( ); //左后
void turnRightback( ); //右后
void _stop(); //停车
//-------------------------------------------------------------------//
//*******************************************************************//
///
//红外遥控/
///
const int irReceiverPin = 2; // 红外接收器的 OUTPUT 引脚接在 PIN2 接口 定义irReceiverPin变量为PIN2接口
IRrecv irrecv(irReceiverPin); // 设置irReceiverPin定义的端口为红外信号接收端口
decode_results results; // 定义results变量为红外结果存放位置
void rev(void);
void scan(void);
//-------------------------------------------------------------------------//
void setup()
{
Serial.begin(9600); //9600(PC端使用)
motor_pinint(); //电机引脚初始化
irrecv.enableIRIn(); // 启动红外解码
}
void loop()
{
if(choose==1) scan();
else if(choose==2) rev();
}
/*电机引脚初始化*/
void motor_pinint( )
{
pinMode (leftA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (leftB_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righA_PIN, OUTPUT); //设置引脚为输出引脚
pinMode (righB_PIN, OUTPUT); //设置引脚为输出引脚
}
/**************************************************
forward子函数——前进子函数
函数功能:控制车前进
**************************************************/
void forward( )
{
analogWrite(leftA_PIN,180);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,180);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
back子函数——后退子函数
函数功能:控制车后退
**************************************************/
void back( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,180); //左轮后退
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,180); //右轮后退
}
/**************************************************
turnLeftOrigin子函数——原地左转子函数
函数功能:控制车原地左转
**************************************************/
void turnLeftOrigin( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,120); //左轮后退
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮前进
}
/**************************************************
turnRightOrigin子函数——原地右转子函数
函数功能:控制车原地右转
**************************************************/
void turnRightOrigin( )
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮前进
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,120); //右轮后退
}
/**************************************************
turnRightforword子函数——右前运动子函数
函数功能:控制车右前
**************************************************/
void turnRightforword( )
{
analogWrite(leftA_PIN,200);
analogWrite(leftB_PIN,0); //左轮快前进
analogWrite(righA_PIN,120);
analogWrite(righB_PIN,0); //右轮慢前进
}
/**************************************************
turnLeftforword子函数——左前运动子函数
函数功能:控制车左前
**************************************************/
void turnLeftforword( )
{
analogWrite(leftA_PIN,120);
analogWrite(leftB_PIN,0); //左轮慢前进
analogWrite(righA_PIN,200);
analogWrite(righB_PIN,0); //右轮快前进
}
/**************************************************
turnRightforword子函数——右后运动子函数
函数功能:控制车右后
**************************************************/
void turnRightback( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,200); //左轮快后退
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,120); //右轮慢后退
}
/**************************************************
turnLeftforword子函数——左后运动子函数
函数功能:控制车左后
**************************************************/
void turnLeftback( )
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,120); //左轮慢后退
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,200); //右轮快后退
}
/**************************************************
stop子函数—停止子函数
函数功能:控制车停止
**************************************************/
void _stop()
{
analogWrite(leftA_PIN,0);
analogWrite(leftB_PIN,0); //左轮静止不动
analogWrite(righA_PIN,0);
analogWrite(righB_PIN,0); //右轮静止不动
}
void rev(void)
{
if (irrecv.decode(&results)) { // 解码成功,把数据放入results.value变量中
if ((results.value==16718055)||(results.value==1033561079))
{forward( ) ;delay(500);_stop();}//2前进
else if((results.value==465573243)||(results.value==16730805)||(results.value==304335233)||(results.value==891929274)||(results.value==93040025))
{back( ) ;delay(500);_stop();}//8后退
else if((results.value==16724175)||(results.value==814588342)||(results.value==2534850111)||(results.value==16724175))
{turnLeftforword( ) ;delay(500);_stop();}//1左前
else if((results.value==16743045)||(results.value==1635910171)||(results.value==16743045))
{turnRightforword( );delay(500);_stop();}//3右前
else if((results.value==1209942246)||(results.value==851901943)||(results.value==16728765))
{turnLeftback( ) ;delay(500);_stop();}//7左后
else if((results.value==16732845)||(results.value==1623741183))
{turnRightback( ) ;delay(500);_stop();}//9右后
else if((results.value==2351064443)||(results.value==16716015)||(results.value==3640844469)||(results.value==3606423579))
{turnLeftOrigin( ) ;delay(250);_stop();}//4原地左转
else if((results.value==16734885)||(results.value==71952287))
{turnRightOrigin( ) ;delay(250);_stop();}//6原地右转
irrecv.resume(); // 继续等待接收下一组信号
}if(results.value==0x16)
delay(600); //延时600毫秒,做一个简单的消抖
}
void scan(void)
{
if (irrecv.decode(&results)) { // 解码成功,把数据放入results变量中
// 把数据输入到串口
Serial.print("irCode: ");
Serial.print(results.value, DEC); // 显示红外编码
Serial.print(", bits: ");
Serial.println(results.bits); // 显示红外编码位数
irrecv.resume(); // 继续等待接收下一组信号
}if(results.value==0x16)
digitalWrite(9, HIGH);
delay(600); //延时600毫秒,做一个简单的消抖
} 将以下截图中的2改为1,即开始测码值,然后下载程序
然后打开串口监视器,波特率设置为9600,使用遥控器对着红外头按下按键,串口监视器上就会出来当前按键的红外编码与位数。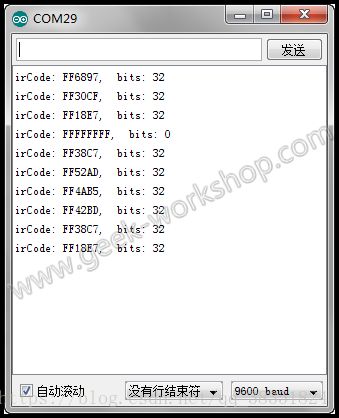
显示irCode:FFFFFFFF,bits:32是因为遥控器上没有做中断,误码导致,只要按一下松开,再按一下松开就没问题。
这样我们就能获得每个按键的码值啦。
小编用的是遥控器上的1-9九个按键,分别对应着小车的不同状态如下图:

然后开始一个按键一个按键进行测试记录数据,将数据填入程序中即可(下图对应按键数据的红圈)
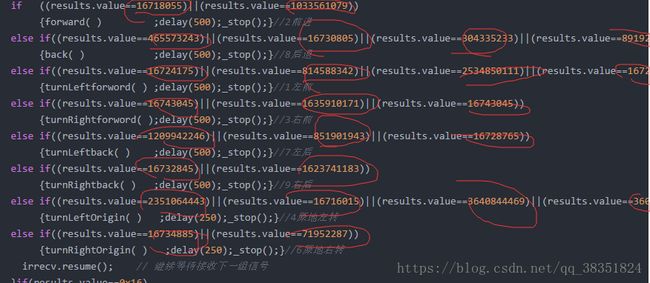
由于小编手头的材料比较劣质,所以往往是一个按键对应多个码值,为了减少误码,特意多写了几个数据;如下图:

将这部分数据测量更改后,准备工作就结束啦!
将以下截图中的1改为2,即开始主程序,然后下载程序
然后感受下,小车的转速、转角是否符合心意,如果想更改,请去每个按键对应的运动指令下,分别更改PWM和延时(对应下图的绿圈和红圈)


这样一个红外遥控小车就做完啦!
可能出现的问题https://blog.csdn.net/qq_38351824/article/details/88551999
如果大家在制作过程中有什么问题或者思路可以在下方留言和我一起交流噢!
如果发现本文有错误,也请在下方评论区指出,感激不尽!