Nodemcu上使用Mongoose OS的坑(1)
下载了微软的Code做编辑环境,其实可以用Visual Studio(官方例子就是VS项目文件)。
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"taskName": "Mongoose build",
"type": "shell",
"command": "mos",
"args": ["build --arch esp8266"],
"problemMatcher": {
"owner": "c",
"fileLocation": ["relative", "${workspaceRoot}"],
"pattern": {
"regexp": "^(.*):(\\d+):(\\d+):\\s+(warning|error):\\s+(.*)$",
"file": 1,
"line": 2,
"column": 3,
"severity": 4,
"message": 5
}
}
}
]
}第一个坑:include路径。
{
"name": "Win32",
"includePath": [
"${workspaceRoot}",
"${workspaceRoot}/src",
"${workspaceRoot}/build/gen",
"D:/mongoose-os-1.5",
"D:/mongoose-os-1.5/frozen",
"D:/mongoose-os-1.5/fw/src",
"D:/mongoose-os-1.5/fw/common",
"C:/Program Files (x86)/CodeBlocks/MinGW/lib/gcc/mingw32/4.9.2/include",
"C:/Users/y/.mos/libs-1.14/http-server-1.14/src",
"C:/Program Files (x86)/CodeBlocks/MinGW/include",
"C:/Users/y/.mos/libs-1.14"
],
"defines": [
"_DEBUG",
"UNICODE"
],
"intelliSenseMode": "msvc-x64",
"browse": {
"path": [
"${workspaceRoot}",
"${workspaceRoot}/src",
"${workspaceRoot}/build/gen",
"D:/mongoose-os-1.5",
"D:/mongoose-os-1.5/frozen",
"D:/mongoose-os-1.5/fw/src",
"D:/mongoose-os-1.5/fw/common",
"C:/Program Files (x86)/CodeBlocks/MinGW/lib/gcc/mingw32/4.9.2/include",
"C:/Users/y/.mos/libs-1.14/http-server-1.14/src",
"C:/Program Files (x86)/CodeBlocks/MinGW/include",
"C:/Users/y/.mos/libs-1.14"
],
"limitSymbolsToIncludedHeaders": true,
"databaseFilename": ""
}
}路径不全,则编译时会提示 未定义的引用。在IDE中也会有波浪下划线,点击#include...,左侧有图标小灯可跳。
正确包含文件后,颜色、样式如下:
第2个坑,针脚映射。
注意,MGS是for esp8266等,不是for nodemcu。 所以在函数里访问GPIO的Pin,不能按照Nodemcu板子上的D0, D1针脚来用。
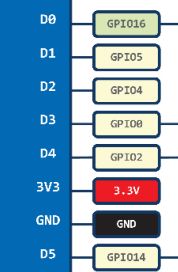
如D0是用户指示灯,让它闪烁时,函数mgos_gpio_toggle(16),显然要使用GPIO16 。
Pin号用错了,结果是程序不执行,也不报错(编译可以通过)。
一个完整的main.c如下:
#include "mgos_timers.h"
#include "mgos.h"
#include "common/cs_dbg.h"
#include "common/platform.h"
#include "frozen/frozen.h"
#include "mgos_app.h"
#include "mgos_mongoose.h"
#include "mgos_uart.h"
#include "mgos_gpio.h"
#include "mgos_mongoose.h"
#include "sht1x_v3.h"
#define UART_NO 0
#define led_0 16
#define btn_set 4
#define btn_reset 5
//const struct sys_config_wifi_sta *ap;
char mode_temp = 0x3;
char mode_hum = 0x5;
char info[50];
SHT1x_V3 shtx_v3 = {0, 0, 0.0, 0.0, 0x3, 0, 0};
//ip请求处理
static void ip_handler(struct mg_connection *c, int ev, void *p, void *user_data)
{
if (ev == MG_EV_HTTP_REPLY)
{
struct http_message *hm = (struct http_message *)p;
if (hm->resp_code == 200)
{
int c = json_scanf(hm->message.p, hm->message.len, "ip:%Q", &info);
if (c > 0)
{
//mgos_uart_printf(UART_NO, info);
printf("get ip:%s", info);
}
}
else
{
//mgos_uart_printf(UART_NO, "connect failed\n");
printf("connect failed");
}
}
(void)user_data;
(void)c;
}
//ip 定时器
static void cb_ddns_timer(void)
{
const char *url = "http://ip.chinaz.com/getip.aspx";
mgos_connect_http(url, ip_handler, NULL);
//(void)arg;
}
//按键
static void cb_btnset(int pin, void *arg)
{
//printf("button set \n");
printf("button set \n");
(void)pin;
(void)arg;
}
static void cb_btnreset(int pin, void *arg)
{
//printf("button reset \n");
printf("button reset \n");
(void)pin;
(void)arg;
}
//心跳信号
static void cb_led_heartbeat(void *arg)
{
mgos_gpio_toggle(led_0);
printf("I am here,...\n");
(void)arg;
}
//读传感器
static void cb_read_sht1x(void *arg)
{
measure(&shtx_v3, *(char *)arg);
//(void)arg;
}
/* main entry */
enum mgos_app_init_result mgos_app_init(void)
{
//timers init
int result = mgos_timers_init();
printf("timer init:%d", result);
mgos_uptime_init();
//定时取外网IP
//mgos_set_timer(20000, true, cb_ddns_timer, NULL);
cb_ddns_timer();
//更新ddns
//注册按键
mgos_gpio_set_button_handler(btn_set, MGOS_GPIO_PULL_UP, MGOS_GPIO_INT_EDGE_POS, 100, cb_btnset, NULL);
mgos_gpio_set_button_handler(btn_reset, MGOS_GPIO_PULL_UP, MGOS_GPIO_INT_EDGE_POS, 100, cb_btnreset, NULL);
//heartbeat
mgos_gpio_set_mode(led_0, MGOS_GPIO_MODE_OUTPUT);
mgos_set_timer(2000, true, cb_led_heartbeat, NULL);
//读取温湿度
connectionreset();
int id = mgos_set_timer(15 * 1000, true, cb_read_sht1x, &mode_temp);
printf("read temp timer id:%d", id);
mgos_set_timer(10 * 1000, true, cb_read_sht1x, &mode_hum);
// 发送
return MGOS_APP_INIT_SUCCESS;
}
对于回调函数里的void*参数,参见前一篇的翻译:C的void指针。