数据结构之图
图
图的定义:是一种较线性结构和树更为复杂的数据结构,图中任意两个结点之间都可以直接相关。顶点之
间的关系是多对多的。
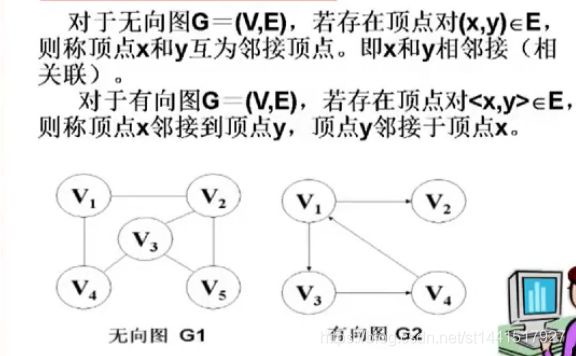
图是一个二元组:G=(V,E),v定点集合,E边集合
图分为无向图和有向图。
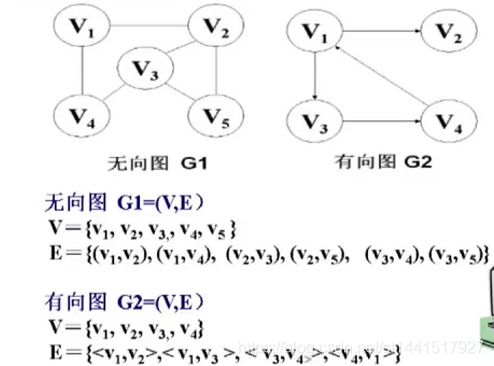
注意有向图边的集合元素之间是用<>包起来的。
顶点:图中的数据元素。
边:两个顶点之间的关系。
无向图中的顶点偶对(例如:()v1,v2)边)(边)是无序的。
有向图的图中顶点偶对(弧)是有序的。
完全图和有向完全图:
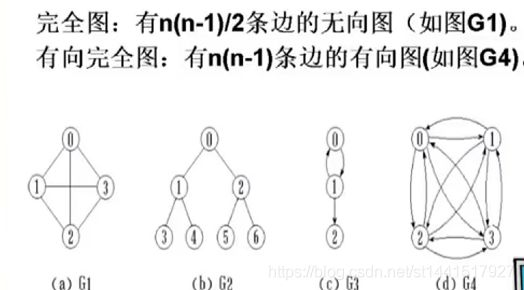
完全图:如G:4个顶点,4*(4-1)/2=6,正好6条边。
有向完全图:如G4:4个顶点。4*(4-1)=12,正好12条边。任意两个顶点之间都有两条不同向的边。
稀疏图:有很少的边或者弧的图。
稠密图:有很多的边或者弧(有向图里面边也叫作弧)的图。
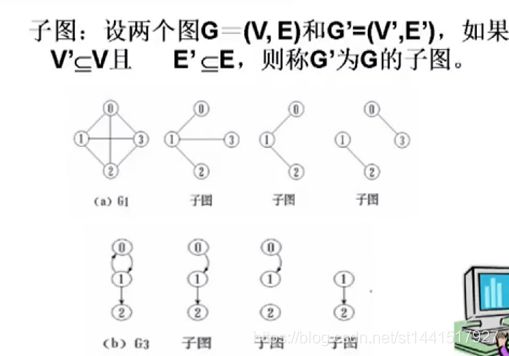
子图:第二个图的所有顶点都包含在第一个图中的顶点集之中,同时第二个图的所有边都在第一个图中的边
集合中。
权和网:
权(Weight):与图的边相关的数值。
网(Network):带权的图。
邻接点:
无向图:两个存在于主图顶点集合当中的顶点之间相互关联,这种称为v1和v2相邻接。
有向图:起点邻接于终点。
两种图的邻接关系不同。
顶点的度:在无向图中,和该顶点相关联的边的数目称为顶点的度。
TD:表示指定顶点的度。
有向图中:以x顶点为尾的弧的数目称为顶点x的出度,以x为头的弧的数目称为顶点x的入度。
有向图中:顶点的度等于该顶点的入度和出度之和。
路径与路径长度。
路径:在图中,若从顶点x除法,经过一些顶点v1、v2、…、vm到达顶点y。则称为顶点序列为(x、v1、
v2、…、vm、y)为顶点x到顶点y的路径。
路径长度:
①非带权图的路径长度是指此路径上砭的条数,
②带权图的路径长度是指路径上各边的权之和。
简单路径:序列中的顶点不重复出现的路径。
回路(环):第一个顶点和最后一个顶点相同的路径。
简单回路(环):除第一个和最后一个顶点,其余顶点不重复出现的路径。
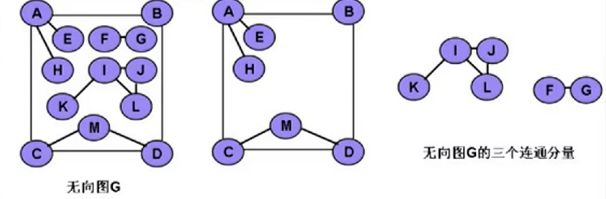
连通图与连通分量:
连通:在无向图中,如果从x到y存在路径,则称为x和y是连通的。
连通图:无向图G中如果任意两个顶点x、y之间都是连通的,则称为G是连通图。

例如:这个图是连通图,但不是完全图,每个顶点之间都存在路径。
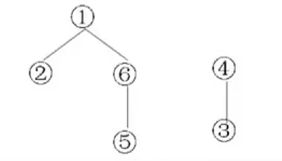
连通分量:无向图中的 极大连通子图。

第一个图是主图:后面三个都是第一个图的连通子图。
极大连通子图:将主图中的任意一个不在子图中的任意顶点放在子图当中,将导致子图不再是连通图。
例如:D、E两个顶点,将其他的任意顶点放在这两个顶点的子图当中,都会导致子图不是连通图,所以这个
虽然是两个顶点,但是依然是个连通子图。
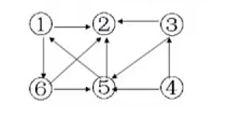
有向图中的强连通图和连通分量:
强连通图:有向图G中任意两个顶点x、y之间都是相互科大的。称为G是强连通图。两个顶点之间都有互相指
向的弧。
连通分量:有向图中的极大连通子图。

例如第二个,就不是强连通图。
有向图的极大连通子图:
最后一个图的两部分都是第二个图的连通分量。也就是极大连通子图。
图的存储结构:
图需要存储的信息:顶点和边;
1、邻接矩阵:表示顶点之间相邻关系的矩阵。里面的值不是1就是0
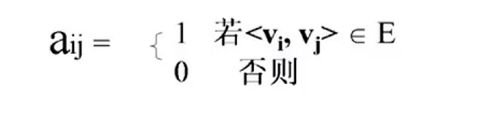
两个顶点可达为1,不可达为0----<>表示边元素。

有向图中,图中有n条边,那么对应的矩阵图中有n个1.
无向图中,图中有n条边,那么对应的矩阵图中有2n个1,而且无向图中的 矩阵图是对称的。
网的邻接矩阵:
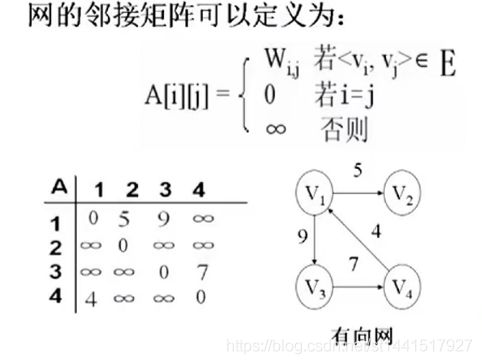
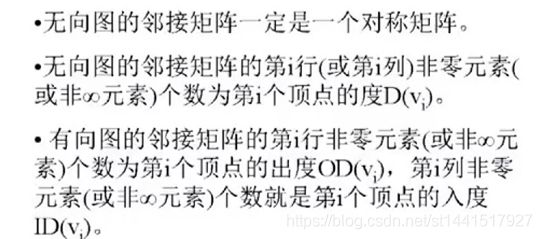
性质2中,非零元素的个数也就是边的个数。自然而然也就是这个顶点的度。
性质3:行元素起始。所以每一行的非零元素的个数就是这一行顶点的出度。列元素为终,所以每一列的非零元素的个数就是这一列顶点的入度。
建立邻接表:
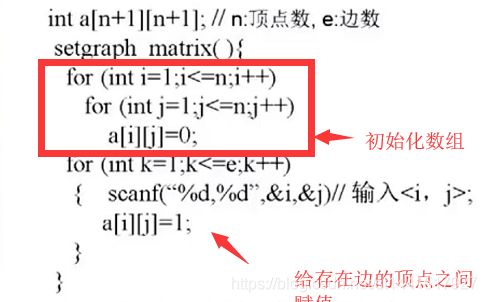
有向图和无向图的区别:
无向图的话,因为矩阵是对称的,所以需要在赋值语句中添加一条:a[j][i]=1
判断通过矩阵两个顶点之间有没有边:

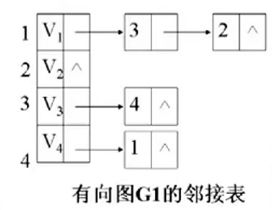
2、邻接链表
后面的结点中的数值是对应结点的数组下标
①拿一个数组存放图中所有的顶点。
无向图:

数组中的每一个元素为一个结构体指针的链表,链表中指针的指向表示边。
有向图:
也是拿数组存储图中的结点。

有向网络:
也就是在结点中添加了一个权的变量。

数组中存放的是头结点:
被指向的结点是边结点。
如果是邻接表,那么头结点可以添加一个成员变量空间为记录当前结点的入度。如果是逆邻接表,那么可以
存储对应结点的出度。

算法:
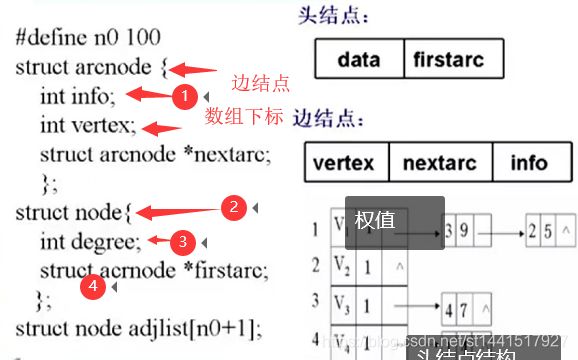
①:权值
vertex:数组下标
②:存储头结点的结构体类型
③:头结点的其他信息。
④:指向边结点的指针,所有是边结点的结构体类型。
输入边的时候将权值一起输入
图的遍历:
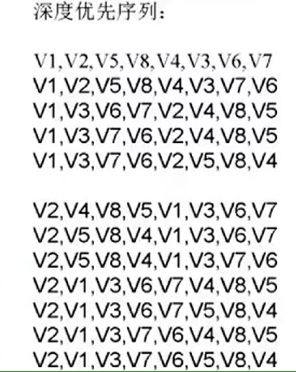
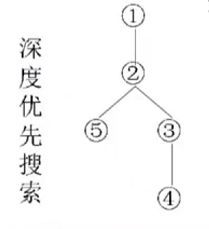
1、深度优先搜索:

示例:
v1开始,可以先访问v2、或者v3,此处选择v2.
沿着v2访问带v5之后,发现v5没有未被访问的邻结点。所以沿着原路返回,接着查看v8是否存在未被访问的
邻结点。依次下去。
此处序列可能不唯一。

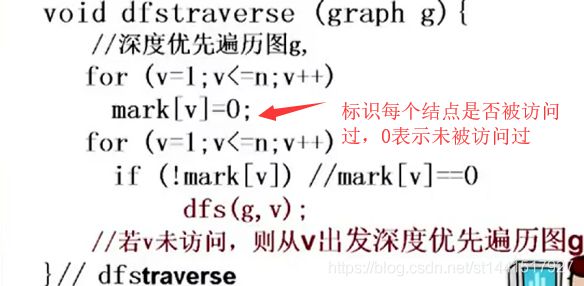
算法描述:
假设g是连通图或者非连通图的一个联通分量,将v0的第一个邻接顶点放在w中。

每一层循环结束之后,都是向上一层返回的过程,上一层会继续判断是否还存在为被访问的邻接顶点。
深度优先搜索是针对于连通图的。
访问非连通图的时候,需要多次重复深度优先搜索。因为有些顶点之间是不可达的。无论从哪个顶点为起始
顶点,都只会发生下面的三种情况中的一种。
如果从当前顶点开始遍历,结束后发现没有遍历到全部的顶点,那么此时需要重新选择一个起始顶点。
重复3次上面遍历,就能将所有的顶点遍历完毕。

因为可能涉及到多个起始顶点,所以不需要知道起始顶点。
这个dfstraverse函数只是确定起始顶点,下面依然调用了上面的dfs函数,传入被需要遍历的图和起始顶点。
此处只会将未被访问过的顶点为起始顶点。
以邻接表为存储结构的图的遍历。
mark数组存放所有顶点状态的数组。
g:存储起始顶点的数组
v:起始顶点的数组下标
依然借用的是dfs函数,只是在寻找起始顶点的时候会有不同。

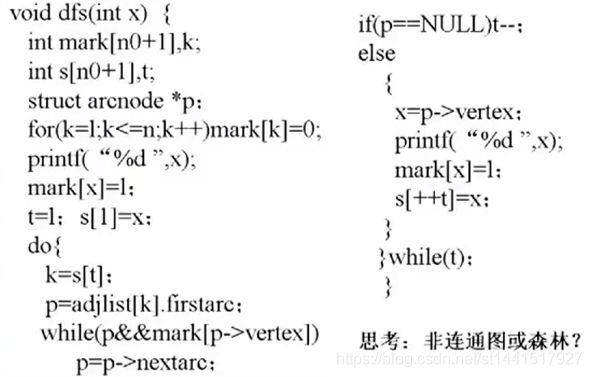
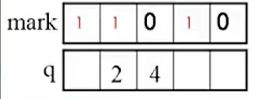
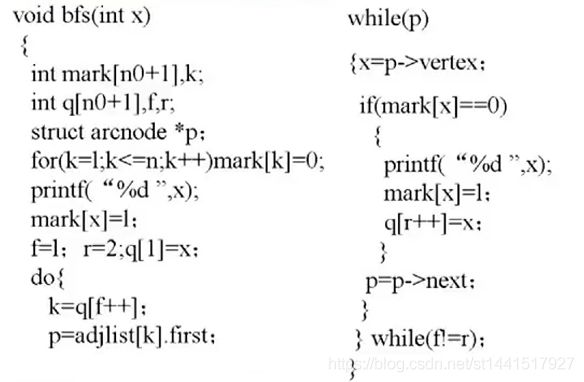
非递归实现算法:
数组中应该存储结点的值和指针。
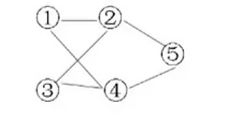
需要注意的是:虽然2结点中的指针指向4,并不是2和4之间有边,而是起始顶点1和4之间有边。

算法:
①标志数组和栈初始化。
数组全部设为0(未被访问状态)
②访问起始顶点,将这个顶点进栈,改变其访问标志。
③当栈不为空时循环,查找栈顶元素未被访问过的一个邻接顶点
如果栈顶元素找不到未被访问的邻接顶点,那么将栈顶元素出栈。
如果找到栈顶元素未被访问过的邻接顶点,那么访问该顶点,并将该顶点进栈,改变访问标志(改为1,表示
被访问过)。
以下mark的初始状态为0;
s是栈。起始为只有一个顶点(也就是1)
能找到未被访问过大 邻接结点是,一直进栈

找不到未被访问过的邻接顶点。一个一个栈顶元素出栈,直至为空。

算法:
x为起始顶点下标
以上都是基于连通图或者非连通图的连通分量来遍历实现的。
广度优先搜索:类似于树的层次遍历。

2、广度优先搜索的遍历序列:
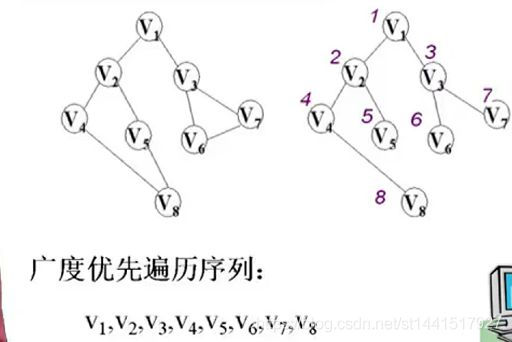
该序列也不是唯一的。
算法思想:
g是要遍历的图,v0是起始顶点。
此处需要创建一个队列Q;

访问起始顶点并且将起始顶点的标志设为1;
初始化一个队列,
将起始顶点入队,
只要队列不为空;
队列的首结点出队,然后寻找该顶点的邻接点,如果发现存在未被访问的邻接点的时候,访问该邻接点,然
后改变访问标志,接着将该顶点入队,
非递归算法:(邻接表存储结构)

①标志数组和队列初始化

②访问起始顶点,入队。置已访问标志。
③当队列不为空时循环:查找队首元素未被访问过的所有邻接顶点。
若为找到,将当前队首元素出队;
若找到,访问该顶点,将该顶点入队,置已访问标志。
注意:此时的队首元素还没有被出队。所以可以继续访问该队首元素的其他邻接点,直至找不到出队为止;
例如:1顶点为队首元素,访问完1顶点的2、4邻接顶点之后,将2、4顶点入队,接着,发现1顶点没有未被访
问过 的邻接顶点,所以1结点出队。
算法实现:
第一个for循环时初始起始顶点。
do{}while循环的条件是,队列不为空;f!=r
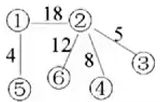
图应用算法之最小生成树:

假设从顶点1开始:

连通图或有根的有向图可以生成树;

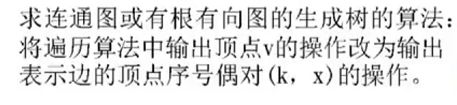
意思是:之前的遍历算法输出的是顶点,现在改为输出的是两个顶点的操作(也就是边,因为两个顶点确定一条边)
特殊情况:

此时生成的是一个树林;
例如:
非连通图或者非强连通图生成树林的算法:

if中判断当前顶点是否被访问过。
此处调用的dfs函数中,应该将之前的输出顶点改为输出边。
此处注意:起始顶点不同,最后生成的树的个数可能是不同的;
最小生成树
定义:生成树中边的权值(代价)之和最小的树。
此处:不要用肉眼描绘最小生成树,而是在之前生成的树林中边的权值之和最小的树。例如此处:
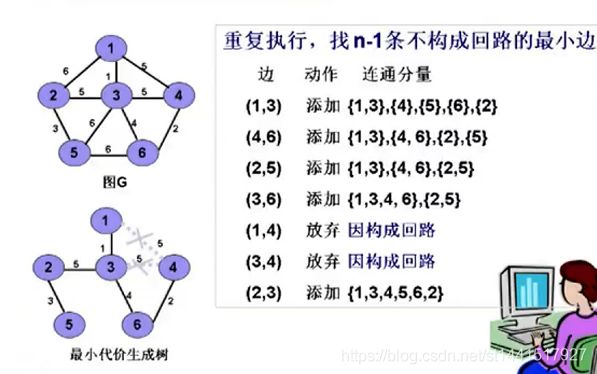
最小生成树的寻找方法:
找n-1条不构成回路的最小边。
两种常见算法:
①Kruscal算法
先找权值最小的边,找到之和放在树中。
构建过程:
为什么U的初值等于V?是因为最小生成树的应该包含图所有的顶点。
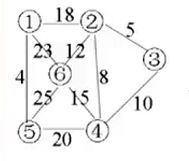
i:顶点、j:顶点、w:权
对图中所有边进行排序(权值由小到大)
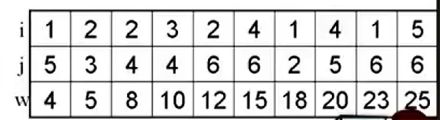
构建树:找最小边,且不会构成回路。
最后生成的结果:
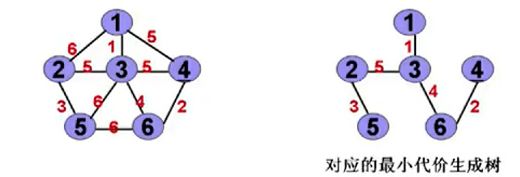
②prim算法
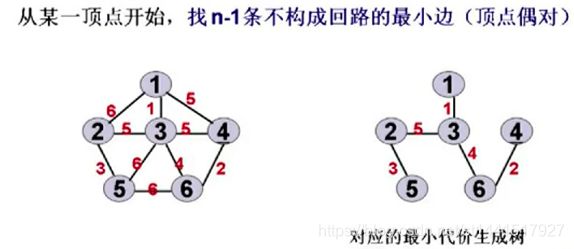
与之前的算法生成过程不同:
选取应该顶点放在树中:然后找以该顶点为起始点的边,找一个最小的边,对应就有一个新的结点加入到了
树中,此时也找出这个顶点为起始顶点的边。再寻找最小的边。
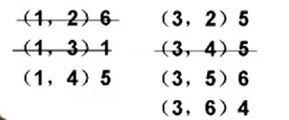
找出两个顶点的最小边:
因为此时(1,3)边已经进入树中,所以消除掉该边记录,接着找出以3为起始顶点的所有边,此时继续寻找发
现(1,2)边的权值比(3,2)边权值大,而且将(3,2)边放入树中不会发生回路,所以此时就可以将
(1,2)边删除掉,然后接着引入(3,6)边,这样子做的目的是为了减少查询次数。可以选择提前删除。
拓扑排序:
可以解决的问题:
AOV网络:用顶点边表示活动的网络。
顶点:一个工程中的活动。
边:活动的顶点间的优先关系。起点优于终点。
注意:AOV网中是不容许出现环的。
示例:
通俗说就是:干一件事之前,应该先把其他事干了,才能满足干这件事的条件。
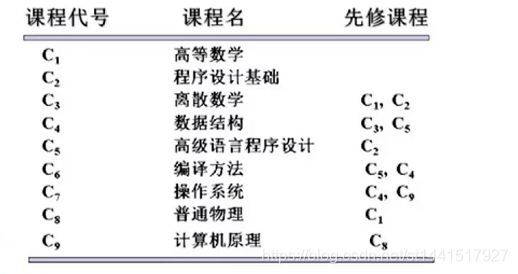
先修关系:
AOV网
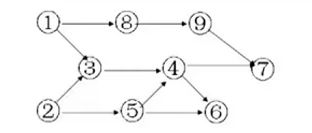
拓扑序列为:1, 8,9 ,2,5,3, 4,6, 7 序列不唯一
是前驱的一定在前面,但是在前面的不一定是前驱,例如9不是3的前驱一样。
进行拓扑排序的方法:
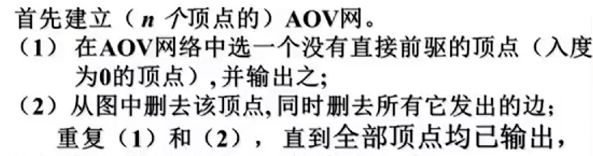
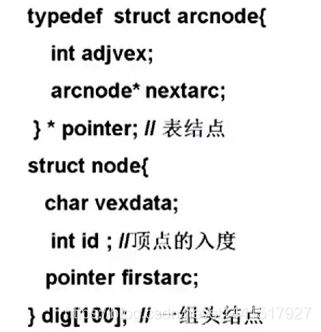
算法实现(邻接表的存储结构)
在存储结构中,需要多一个成员,记录该结点的入度,入度为0表示当前结点没有前驱。
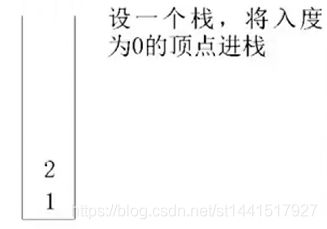
使用一个存放入度为0的顶点的栈或者队列。只要出现入度为0的结点,就将其存入栈中。在选择起始点的时
候,可以直接在栈中寻找。
算法思想:

算法实现例子:

此时再栈中随意找一个顶点输出,因为此时都是入度为0的顶点,例如输出2,那么2出栈,此时将2后面的单
链表中的每个顶点的入度-1,如果出现为0的顶点,例如5此时的入度为0,那么5入栈,依次下去。直至栈为
空,终止此过程,现在的输出序列就是拓扑序列。
![]()
最短路径算法:
从图中某一个顶点(称为源点)到达另一顶点(称为终点)的路径可能不止一条,如何找到一条路径是的沿
此路径上各边的权值总和达到最小。
①(Dijkstra–单源最短路径问题)迪杰斯特拉
②(Floyd–所有顶点之间的最短路径)弗洛伊德
单源最短路径:
给定一个带权有向图和源点,从源点到图中其他顶点的最短路径(条件是各边上的权值大于或等于0)。
思想:按路径长度的递增次序,逐步产生最短路径。
步骤:首先求出长度最短的一条最短路径,在参照它求出长度次短的一条最短路径,以此类推,直到从顶点v
到其他各顶点的最短路径全部求出为止。
mark数组是标识该结点是否被访问过。没有为0,到达过为1;
源点是1,终点是dist终点元素。里面的每个元素下面对应的值都是从1结点开始无论是间接还是直接到达的路
径长度,并不是前驱到达的路径长度。
Path中存放的是顶点序列,也就是起点到达终点所要经过的顶点序列。起始顶点的初始状态为0,其他每个顶
点的初始状态都为1,也就是前驱暂且都认为是1。
注意:直接相连的顶点之间的这条路径不一定是最短的。
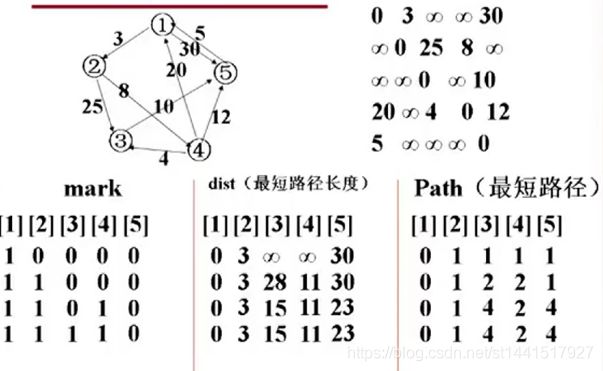
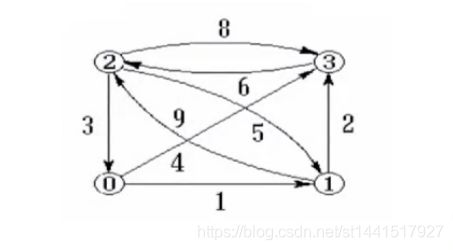
最短路径在dist中最下面一行存放,此处也就是:1到2长度为3,1到3长度是15,…。
到达的路径是在Path中最后一行存放。最短路径如下:

所有顶点之间的最短路径:

解决方法:
①将每一个顶点都作为源点,都使用一次迪杰斯特拉算法。
②Floyd算法。
借助邻接矩阵的初始状态。
M0初始状态就是这个图的邻接矩阵。
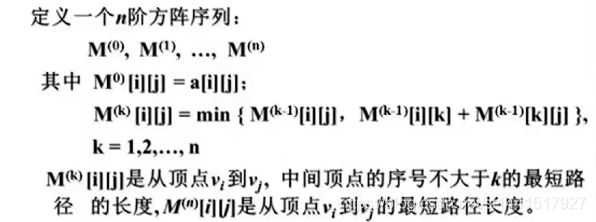
基本思想:递推地产生一个矩阵序列。
![]()
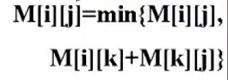
递推公式:
多少个顶点就递推出多少个矩阵,(不包含M0邻接矩阵)
i表行,j表列。i=k,j=k,i=j时的值不变,所以矩阵中的第一列和第一行还有对称轴都没有发生变化。
i和j的取值由当前矩阵中缺少元素的坐标决定的,k是当前矩阵的的序号。
红色标记是递推出的值,起初建立矩阵的时候这个位置没有值,是递推出的。
递推出的最后一个矩阵的元素坐标就是行号为起点,列号为终点的路径,路径长度是对应元素的值。
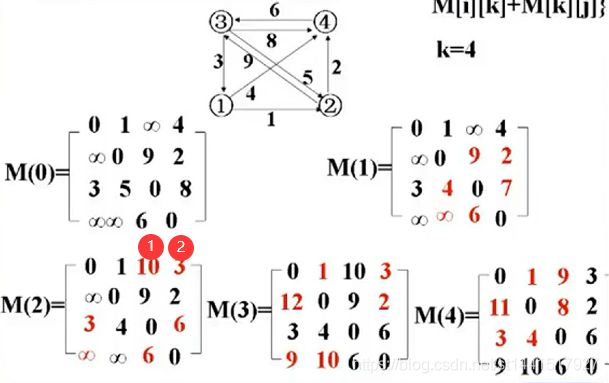
计算①时:i为1,j为3,k为2.
递推过程就是:M(1)矩阵中(1,3)位置的值(无穷大)和(1,2)位置的值(1)+(2,3)位置的值(9)
之和(10)中的最小取值(10)。
计算②时:i为1,j为4,k为2.
过程:M(1)矩阵中(1,4)位置的值(4)和(1,2)位置的值(1)+(2,4)位置的值(2)之和(3)中取
最小值,也就是(3)。
图的关键路径:
AOV网:用边表示活动的网络,有向无环图。
要解决的问题是:
(1)完成整个工程至少需要多少时间(假设网络中没有环)
(2)为缩短完成工程所需的时间,应当加快哪些活动?

顶点表示事件,边表示完成该事件需要的时间。
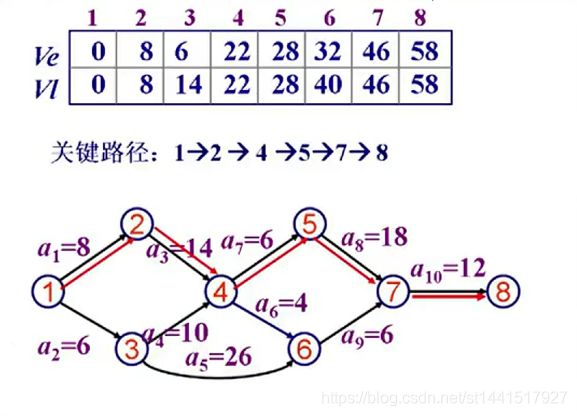
例如4:
最短开始时间:8+14=22,6+10=16,取值大的,因为需要满足两个条件才可以完成4,所以得取多的时间来保
证能够完成前提条件,所以4的最短开始时间是22.
最迟开始时间:倒着往回看,8的最长开始时间是58,7的是58-12=46,6的是46-6=40,5的是46-18=28,4的是28-4=24。
6=28,40-4=36,28小于36,所以是28.此处选取较短的时间为最迟开始时间。
最早开始时间和最晚开始时间相等的顶点是关键路径。
此处也就是:1-2-4-5-7-8;
求关键路径的方法:
定义一个队列:来存储入度为0的顶点,当没有结点的前驱是队首元素的时候,也就是当前队首元素的后继结
点全部已经在队列当中了,直接将队首元素出队。
定义一个数组longest:来存储到达该结点的最早开始时间,
定义一个数组pre:来存储当前结点的前驱结点。