我们知道在神经网络上通过前向传导和后向传导算法,可以再给定训练集的基础上训练参数,这是神经网络有监督学习的一种应用。但是有时候数据集并不是都有标签的,我们希望给一堆数据之后,通过神经网络,在没有既定目标函数的情况下,在一定约束下神经网络能够自行独立地学习到一些参数。这种没有特定学习目标的学习方法,就叫做无监督的学习方法。
现在来看一种最简单的无监督神经网络算法,自编码器。
自编码器神经网络是一种运用后向传递算的无监督的算法。
给定一系列无监督的训练集

初始化的时,令
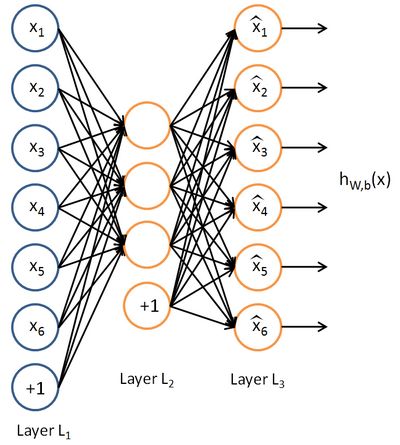
我们希望经过训练后:
这实际上是学习了一个单位函数。单位函数很常见的,只是单位函数本身作用是有限的,自编码神经网络的精髓在于中间的隐层,通过对中间隐层的约束,我们可以得到很多有用的结果。我们接下来讨论两个常见的约束:
1.隐层单元个数小于输入层单元个数
这个时候中间隐层相当于降维。
2.隐层单元个数大于输入层单元个数,这个时候我们可以加入稀疏约束,中间隐层是一组稀疏向量
我们现在着重讨论第二个约束,也就是稀疏自编码器。
首先,我们假设一个单元被激活当且仅当它的输出值接近1,不被激活当它的输出值接近0.(默认激活函数为sigmod函数)
 :代表的是隐层的第j个单元
:代表的是隐层的第j个单元
特别地,在这里我们用  表示这个单元被激活,如果
表示这个单元被激活,如果
![\begin{align}\hat\rho_j = \frac{1}{m} \sum_{i=1}^m \left[ a^{(2)}_j(x^{(i)}) \right]\end{align}](http://img.e-com-net.com/image/info8/44d79e8418644a4e820ac33a3743332e.png)
我们将稀疏约束的数学形式给出:

其中 表示稀疏参数,一般是0.05
表示稀疏参数,一般是0.05
这个稀疏约束的意思就是中间隐层的大部分单元都是未被激活的(输出值接近0)
现在我们需要得出稀疏自编码的代价函数,这个代价函数很显然要考虑到稀疏约束这个条件,因此我们引入:
也就是:

KL距离,是Kullback-Leibler差异(Kullback-Leibler Divergence)的简称,也叫做相对熵(Relative Entropy)。它衡量的是相同事件空间里的两个概率分布的差异情况。我们在这里只需要知道时KL=0,而二者相差越大,KL值越大。
更为详细的KL的资料参考:http://www.cnblogs.com/ywl925/p/3554502.html
现在我们可以写出稀疏自编码器的代价函数:

由之前的后向传递算法我们得到:
加入稀疏约束后:

参考资料:http://deeplearning.stanford.edu/wiki/index.php/UFLDL_Tutorial
%% CS294A/CS294W Programming Assignment Starter Code
% Instructions
% ------------
%
% This file contains code that helps you get started on the
% programming assignment. You will need to complete the code in sampleIMAGES.m,
% sparseAutoencoderCost.m and computeNumericalGradient.m.
% For the purpose of completing the assignment, you do not need to
% change the code in this file.
%
%%======================================================================
%% STEP 0: Here we provide the relevant parameters values that will
% allow your sparse autoencoder to get good filters; you do not need to
% change the parameters below.
tic
visibleSize = 8*8; % number of input units
hiddenSize = 25; % number of hidden units
sparsityParam = 0.01; % desired average activation of the hidden units.
% (This was denoted by the Greek alphabet rho, which looks like a lower-case "p",
% in the lecture notes).
lambda = 0.0001; % weight decay parameter
beta = 3; % weight of sparsity penalty term
%%======================================================================
%% STEP 1: Implement sampleIMAGES
%
% After implementing sampleIMAGES, the display_network command should
% display a random sample of 200 patches from the dataset
patches = sampleIMAGES;
display_network(patches(:,randi(size(patches,2),200,1)),8);
% Obtain random parameters theta
theta = initializeParameters(hiddenSize, visibleSize);
%%======================================================================
%% STEP 2: Implement sparseAutoencoderCost
%
% You can implement all of the components (squared error cost, weight decay term,
% sparsity penalty) in the cost function at once, but it may be easier to do
% it step-by-step and run gradient checking (see STEP 3) after each step. We
% suggest implementing the sparseAutoencoderCost function using the following steps:
%
% (a) Implement forward propagation in your neural network, and implement the
% squared error term of the cost function. Implement backpropagation to
% compute the derivatives. Then (using lambda=beta=0), run Gradient Checking
% to verify that the calculations corresponding to the squared error cost
% term are correct.
%
% (b) Add in the weight decay term (in both the cost function and the derivative
% calculations), then re-run Gradient Checking to verify correctness.
%
% (c) Add in the sparsity penalty term, then re-run Gradient Checking to
% verify correctness.
%
% Feel free to change the training settings when debugging your
% code. (For example, reducing the training set size or
% number of hidden units may make your code run faster; and setting beta
% and/or lambda to zero may be helpful for debugging.) However, in your
% final submission of the visualized weights, please use parameters we
% gave in Step 0 above.
[cost, grad] = sparseAutoencoderCost(theta, visibleSize, hiddenSize, lambda, ...
sparsityParam, beta, patches);
%%======================================================================
%% STEP 3: Gradient Checking
%
% Hint: If you are debugging your code, performing gradient checking on smaller models
% and smaller training sets (e.g., using only 10 training examples and 1-2 hidden
% units) may speed things up.
% First, lets make sure your numerical gradient computation is correct for a
% simple function. After you have implemented computeNumericalGradient.m,
% run the following:
checkNumericalGradient();
% Now we can use it to check your cost function and derivative calculations
% for the sparse autoencoder.
numgrad = computeNumericalGradient( @(x) sparseAutoencoderCost(x, visibleSize, ...
hiddenSize, lambda, ...
sparsityParam, beta, ...
patches), theta);
% Use this to visually compare the gradients side by side
disp([numgrad grad]);
% Compare numerically computed gradients with the ones obtained from backpropagation
diff = norm(numgrad-grad)/norm(numgrad+grad);
disp(diff); % Should be small. In our implementation, these values are
% usually less than 1e-9.
% When you got this working, Congratulations!!!
%%======================================================================
%% STEP 4: After verifying that your implementation of
% sparseAutoencoderCost is correct, You can start training your sparse
% autoencoder with minFunc (L-BFGS).
% Randomly initialize the parameters
theta = initializeParameters(hiddenSize, visibleSize);
% Use minFunc to minimize the function
addpath minFunc/
options.Method = 'lbfgs'; % Here, we use L-BFGS to optimize our cost
% function. Generally, for minFunc to work, you
% need a function pointer with two outputs: the
% function value and the gradient. In our problem,
% sparseAutoencoderCost.m satisfies this.
options.maxIter = 400; % Maximum number of iterations of L-BFGS to run
options.display = 'on';
[opttheta, cost] = minFunc( @(p) sparseAutoencoderCost(p, ...
visibleSize, hiddenSize, ...
lambda, sparsityParam, ...
beta, patches), ...
theta, options);
%%======================================================================
%% STEP 5: Visualization
W1 = reshape(opttheta(1:hiddenSize*visibleSize), hiddenSize, visibleSize);
display_network(W1', 12);
print -djpeg weights.jpg % save the visualization to a file
toc
function patches = sampleIMAGES()
% sampleIMAGES
% Returns 10000 patches for training
load IMAGES; % load images from disk
patchsize = 8; % we'll use 8x8 patches
numpatches = 10000;
% Initialize patches with zeros. Your code will fill in this matrix--one
% column per patch, 10000 columns.
patches = zeros(patchsize*patchsize, numpatches);
%% ---------- YOUR CODE HERE --------------------------------------
% Instructions: Fill in the variable called "patches" using data
% from IMAGES.
%
% IMAGES is a 3D array containing 10 images
% For instance, IMAGES(:,:,6) is a 512x512 array containing the 6th image,
% and you can type "imagesc(IMAGES(:,:,6)), colormap gray;" to visualize
% it. (The contrast on these images look a bit off because they have
% been preprocessed using using "whitening." See the lecture notes for
% more details.) As a second example, IMAGES(21:30,21:30,1) is an image
% patch corresponding to the pixels in the block (21,21) to (30,30) of
% Image 1
image_N=size(IMAGES,3);
for imageNum=1:image_N
[row col]=size(IMAGES(:,:,imageNum));
for PatchNum=1:numpatches
xPix=randi([1 row-patchsize+1]);
yPix=randi([1 col-patchsize+1]);
patches(:,(imageNum-1)*numpatches+numpatches) = reshape( IMAGES(xPix:xPix+7,yPix:yPix+7,...
imageNum),patchsize*patchsize,1);
end
end
%% ---------------------------------------------------------------
% For the autoencoder to work well we need to normalize the data
% Specifically, since the output of the network is bounded between [0,1]
% (due to the sigmoid activation function), we have to make sure
% the range of pixel values is also bounded between [0,1]
patches = normalizeData(patches);
end
%% ---------------------------------------------------------------
function patches = normalizeData(patches)
% Squash data to [0.1, 0.9] since we use sigmoid as the activation
% function in the output layer
% Remove DC (mean of images).
patches = bsxfun(@minus, patches, mean(patches));
% Truncate to +/-3 standard deviations and scale to -1 to 1
pstd = 3 * std(patches(:));
patches = max(min(patches, pstd), -pstd) / pstd;
% Rescale from [-1,1] to [0.1,0.9]
patches = (patches + 1) * 0.4 + 0.1;
end
function [cost,grad] = sparseAutoencoderCost(theta, visibleSize, hiddenSize, ...
lambda, sparsityParam, beta, data)
% visibleSize: the number of input units (probably 64)
% hiddenSize: the number of hidden units (probably 25)
% lambda: weight decay parameter
% sparsityParam: The desired average activation for the hidden units (denoted in the lecture
% notes by the greek alphabet rho, which looks like a lower-case "p").
% beta: weight of sparsity penalty term
% data: Our 64x10000 matrix containing the training data. So, data(:,i) is the i-th training example.
% The input theta is a vector (because minFunc expects the parameters to be a vector).
% We first convert theta to the (W1, W2, b1, b2) matrix/vector format, so that this
% follows the notation convention of the lecture notes.
W1 = reshape(theta(1:hiddenSize*visibleSize), hiddenSize, visibleSize);
W2 = reshape(theta(hiddenSize*visibleSize+1:2*hiddenSize*visibleSize), visibleSize, hiddenSize);
b1 = theta(2*hiddenSize*visibleSize+1:2*hiddenSize*visibleSize+hiddenSize);
b2 = theta(2*hiddenSize*visibleSize+hiddenSize+1:end);
% Cost and gradient variables (your code needs to compute these values).
% Here, we initialize them to zeros.
W1grad = zeros(size(W1));
W2grad = zeros(size(W2));
b1grad = zeros(size(b1));
b2grad = zeros(size(b2));
%% ---------- YOUR CODE HERE --------------------------------------
% Instructions: Compute the cost/optimization objective J_sparse(W,b) for the Sparse Autoencoder,
% and the corresponding gradients W1grad, W2grad, b1grad, b2grad.
%
% W1grad, W2grad, b1grad and b2grad should be computed using backpropagation.
% Note that W1grad has the same dimensions as W1, b1grad has the same dimensions
% as b1, etc. Your code should set W1grad to be the partial derivative of J_sparse(W,b) with
% respect to W1. I.e., W1grad(i,j) should be the partial derivative of J_sparse(W,b)
% with respect to the input parameter W1(i,j). Thus, W1grad should be equal to the term
% [(1/m) \Delta W^{(1)} + \lambda W^{(1)}] in the last block of pseudo-code in Section 2.2
% of the lecture notes (and similarly for W2grad, b1grad, b2grad).
%
% Stated differently, if we were using batch gradient descent to optimize the parameters,
% the gradient descent update to W1 would be W1 := W1 - alpha * W1grad, and similarly for W2, b1, b2.
%
% W1 [w1 w2 w3...]
J_cost = 0;
J_weight = 0;
J_sparse = 0;
[n m] = size(data);
a1 = data; %最初的输入项
z2 = W1*data+repmat(b1,1,m); %z2 num个列 隐层单元的输入值
a2 = sigmoid(z2); %隐层
z3 = W2*a2+repmat(b2,1,m); %输出层的输入值
a3 = sigmoid(z3); %输出层
%输入值和最终输出值误差
J_cost = (0.5/m)*sum(sum((a3-a1).^2));
%权值惩罚项
J_weight = 0.5*(sum(sum(W1.^2))+sum(sum(W2.^2)));
%稀疏性约束
rho = (1/m).*sum(a2,2);%隐层的平均值
J_sparse = sum( sparsityParam.*log(sparsityParam./rho) + (1-sparsityParam).*log(1-sparsityParam)./(1-rho) );
%损失函数
cost = J_cost + lambda*J_weight + beta*J_sparse;
%BP算法
d3 = -( data-a3).* sigmoidInv(z3);%输出层的误差项
sparse_term = beta*(-sparsityParam./rho) + (1-sparsityParam)./(1-rho);
d2 = (W2'*d3+repmat(sparse_term,1,m)).*sigmoidInv(z2); %隐层的误差项
W1grad = W1grad+d2*data';
W1grad = (1/m)*W1grad+lambda*W1;
W2grad = W2grad+d3*a2';
W2gard = (1/m)*W2grad + lambda*W2;
b1grad = b1grad+sum(d2,2);
b1grad = (1/m)*b1grad;
b2grad = b2grad+sum(d3,2);
b2grad = (1/m)*b2grad;
function sig = sigmoid(x)
sig = 1./(1+exp(-x));
end
function sigInv =sigmoidInv(x)
sigInv = sigmoid(x).*(1-sigmoid(x));
end
%-------------------------------------------------------------------
% After computing the cost and gradient, we will convert the gradients back
% to a vector format (suitable for minFunc). Specifically, we will unroll
% your gradient matrices into a vector.
grad = [W1grad(:) ; W2grad(:) ; b1grad(:) ; b2grad(:)];
end
%-------------------------------------------------------------------
% Here's an implementation of the sigmoid function, which you may find useful
% in your computation of the costs and the gradients. This inputs a (row or
% column) vector (say (z1, z2, z3)) and returns (f(z1), f(z2), f(z3)).
function sigm = sigmoid(x)
sigm = 1 ./ (1 + exp(-x));
end
function numgrad = computeNumericalGradient(J, theta)
% numgrad = computeNumericalGradient(J, theta)
% theta: a vector of parameters
% J: a function that outputs a real-number. Calling y = J(theta) will return the
% function value at theta.
% Initialize numgrad with zeros
numgrad = zeros(size(theta));
%% ---------- YOUR CODE HERE --------------------------------------
% Instructions:
% Implement numerical gradient checking, and return the result in numgrad.
% (See Section 2.3 of the lecture notes.)
% You should write code so that numgrad(i) is (the numerical approximation to) the
% partial derivative of J with respect to the i-th input argument, evaluated at theta.
% I.e., numgrad(i) should be the (approximately) the partial derivative of J with
% respect to theta(i).
%
% Hint: You will probably want to compute the elements of numgrad one at a time.
n = size(theta,1);
E = eye(n);
epsilon = 1e-4;
for i=1:n
dtheta = E(:,i)*epsilon;
numgrad(i) = (J(theta+dtheta)-J(theta-dtheta))/(epsilon*2.0);
end
%
% n=size(theta,1);
% E=eye(n);
% epsilon=1e-4;
% for i=1:n
% dtheta=E(:,i)*epsilon;
% numgrad(i)=(J(theta+dtheta)-J(theta-dtheta))/epsilon/2.0;
% end
%% ---------------------------------------------------------------
end
function [] = checkNumericalGradient()
% This code can be used to check your numerical gradient implementation
% in computeNumericalGradient.m
% It analytically evaluates the gradient of a very simple function called
% simpleQuadraticFunction (see below) and compares the result with your numerical
% solution. Your numerical gradient implementation is incorrect if
% your numerical solution deviates too much from the analytical solution.
% Evaluate the function and gradient at x = [4; 10]; (Here, x is a 2d vector.)
x = [4; 10];
[value, grad] = simpleQuadraticFunction(x);
% Use your code to numerically compute the gradient of simpleQuadraticFunction at x.
% (The notation "@simpleQuadraticFunction" denotes a pointer to a function.)
numgrad = computeNumericalGradient(@simpleQuadraticFunction, x);
% Visually examine the two gradient computations. The two columns
% you get should be very similar.
disp([numgrad grad]);
fprintf('The above two columns you get should be very similar.\n(Left-Your Numerical Gradient, Right-Analytical Gradient)\n\n');
% Evaluate the norm of the difference between two solutions.
% If you have a correct implementation, and assuming you used EPSILON = 0.0001
% in computeNumericalGradient.m, then diff below should be 2.1452e-12
diff = norm(numgrad-grad)/norm(numgrad+grad);
disp(diff);
fprintf('Norm of the difference between numerical and analytical gradient (should be < 1e-9)\n\n');
end
function [value,grad] = simpleQuadraticFunction(x)
% this function accepts a 2D vector as input.
% Its outputs are:
% value: h(x1, x2) = x1^2 + 3*x1*x2
% grad: A 2x1 vector that gives the partial derivatives of h with respect to x1 and x2
% Note that when we pass @simpleQuadraticFunction(x) to computeNumericalGradients, we're assuming
% that computeNumericalGradients will use only the first returned value of this function.
value = x(1)^2 + 3*x(1)*x(2);
grad = zeros(2, 1);
grad(1) = 2*x(1) + 3*x(2);
grad(2) = 3*x(1);
end
function [h, array] = display_network(A, opt_normalize, opt_graycolor, cols, opt_colmajor)
% This function visualizes filters in matrix A. Each column of A is a
% filter. We will reshape each column into a square image and visualizes
% on each cell of the visualization panel.
% All other parameters are optional, usually you do not need to worry
% about it.
% opt_normalize: whether we need to normalize the filter so that all of
% them can have similar contrast. Default value is true.
% opt_graycolor: whether we use gray as the heat map. Default is true.
% cols: how many columns are there in the display. Default value is the
% squareroot of the number of columns in A.
% opt_colmajor: you can switch convention to row major for A. In that
% case, each row of A is a filter. Default value is false.
warning off all
if ~exist('opt_normalize', 'var') || isempty(opt_normalize)
opt_normalize= true;
end
if ~exist('opt_graycolor', 'var') || isempty(opt_graycolor)
opt_graycolor= true;
end
if ~exist('opt_colmajor', 'var') || isempty(opt_colmajor)
opt_colmajor = false;
end
% rescale
A = A - mean(A(:));
if opt_graycolor, colormap(gray); end
% compute rows, cols
[L M]=size(A);
sz=sqrt(L);
buf=1;
if ~exist('cols', 'var') %没有给定列数的情况下
if floor(sqrt(M))^2 ~= M %M不是平方数
n=ceil(sqrt(M));
while mod(M, n)~=0 && n<1.2*sqrt(M), n=n+1; end
m=ceil(M/n);
else
n=sqrt(M);
m=n;
end
else
n = cols;
m = ceil(M/n);
end
array=-ones(buf+m*(sz+buf),buf+n*(sz+buf));
if ~opt_graycolor
array = 0.1.* array;
end
if ~opt_colmajor
k=1;
for i=1:m
for j=1:n
if k>M,
continue;
end
clim=max(abs(A(:,k)));
if opt_normalize
array(buf+(i-1)*(sz+buf)+(1:sz),buf+(j-1)*(sz+buf)+(1:sz))=reshape(A(:,k),sz,sz)/clim;
else
array(buf+(i-1)*(sz+buf)+(1:sz),buf+(j-1)*(sz+buf)+(1:sz))=reshape(A(:,k),sz,sz)/max(abs(A(:)));
end
k=k+1;
end
end
else
k=1;
for j=1:n
for i=1:m
if k>M,
continue;
end
clim=max(abs(A(:,k)));
if opt_normalize
array(buf+(i-1)*(sz+buf)+(1:sz),buf+(j-1)*(sz+buf)+(1:sz))=reshape(A(:,k),sz,sz)/clim;
else
array(buf+(i-1)*(sz+buf)+(1:sz),buf+(j-1)*(sz+buf)+(1:sz))=reshape(A(:,k),sz,sz);
end
k=k+1;
end
end
end
if opt_graycolor
h=imagesc(array,'EraseMode','none',[-1 1]);
else
h=imagesc(array,'EraseMode','none',[-1 1]);
end
axis image off
drawnow;
warning on all
版权声明:本文为博主原创文章,未经博主允许不得转载。