算法设计与分析复习
1.动态规划
主要步骤:
1.找出最优解的性质,以刻画其结构特征
2.递归地定义最优值
3.自底向上计算最优值
4.构造最优解
- 1.0 动态规划算法的基本要素为:最优子结构和重叠子问题性质
- 1.1 不是动态规划算法基本步骤的是:找出最优解的解空间
- 1.2 动态规划法是自底向上,贪心算法自顶向下
- 1.3 备忘录方法是动态规划算法的变形
- 1.4 最长公共子序列算法利用的算法是动态规划法
- 1.5矩阵连乘问题的算法可由动态规划算法设计实现
- 1.6 动态规划解决01背包问题不需要排序
1.7 最大子段和算法
int MAXSum(int n, int a[])
{
int sum = 0, b = 0; //sum存储当前最大b[j], b存储当前值b[j]
for(int i = 0; i < n; i++){
if(b > 0) b += a[i];
else b = a[i]; //一旦某个区段和为负,从下一个位置累和
if (sum < b) sum = b;
}
return sum;
}
2贪心算法.
- 2.1能采用贪心算法求最优解的问题,一般具有的重要性质:最优子结构性质和贪心选择性质
- 2.2 哈夫曼编码的贪心算法所需的计算时间为nlogn
- 2.3 背包问题的贪心算法所需的计算时间为nlogn
- 2.4 背包问题的贪心算法
void Knapsack(int n, float M, float v[], float w[], float x[])
M:背包容量 v:价值 w:重量 x:装入份额
{
Sort(n,v,w); //把重量,价值进行排序
int i;
for(i = 1; i <= n; i++) x[i] = 0;
float c = M;
for(i = 1; i <= n; i++){
if(w[i] > c) break; // 背包容量不够
x[i] = 1; //全部装入
c -= w[i]; //背包容量减少
}
if(i <= n) x[i] = c/w[i] //能装入多少
}
- 2.5 贪心算法求活动安排问题:
void GreedySelector(int n, Type s[], Type f[], bool A[])
A: 是否可以开始 n:活动场数 s:开始时间 f:结束时间
当s[i]>=f[j]时,活动相容
{
A[1] = ture; //第一场正常举行
int j = 1;
for(int i = 2; i <=n; i++){
if(s[i] >= f[j]){ //下一次开始时间在上一场结束后
A[i] = ture;
j = i;
}
else A[i] = false;
}
}
3.回溯法
-
3.0回溯法在问题的解空间中,按深度优先策略,从根节点出发搜索解空间树
-
3.1回溯法解旅行售货员问题时的解空间树是子集树
-
3.2 回溯法的效率不依赖确定解空间的时间
-
3.3 避免无效搜索采取:剪枝函数(约束函数 、 限界函数)
-
3.4 背包问题的回溯算法所需的计算时间为n2^n(要排序)
-
3.5 既带有系统性,又带有跳跃性的搜索算法
-
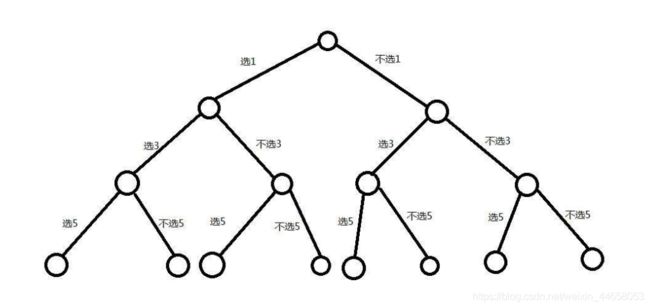
回溯法搜索子集树算法:
//如果满足约束函数和限界函数,赋值后进入下一层。当整棵树都遍历完后输出当前子集树
void backtrack(int t){ //t为当前层数
if(t >=n) //n可视为总层数
output(x); //输出当前可行解x(0/1)
else{
for(int i = 0; i <=1; i++)
x[t] = i;
if(constraint(t) && bound(t)) //约束函数和限界函数都成立
backtrack(t+1); //下一层
}
}
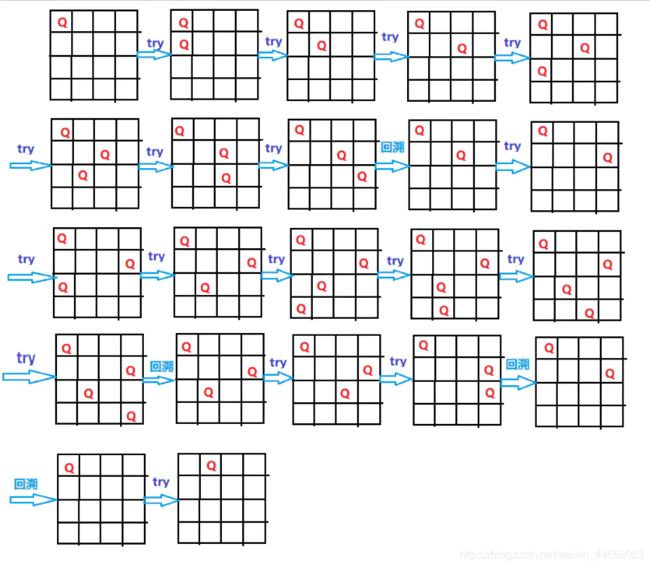
n皇后回溯法:
bool Queen::Place(int k){
//判断x[k]位置是否合法
for(int j = 1; j < k; j++){ //对角或同列
if((abs(k-j) == abs(x[j]-x[k])) || (x[j] == x[k])) return false
对角 同列
else return true;
}
}
void Queen::Backtrack(int t){
if(t > n) sum++; //符合n皇后的方法数量
else{
for(int i = 1; i < t; i++){
x[t] = i;
if(约束条件) Backtrack(t+1);
}
}
}
4.
5. 分治法
基本思想
将一个规模为n的问题分解为k个规模较小的子问题,这些子问题相互独立且与原问题相同。递归的解这些子问题,然后将各个子问题的解合并得到原问题的解。
- 5.1 二分搜索算法利用分治策略实现
二分搜索算法:
int BinarySearch(Type a[], const Type& x, int n){
int left = 0, right = n-1;
while(left < right){
int middle = (left+right)/2;
if(x == a[middle])
return middle
if(x > a[middle])
left = middle+1;
else right = middle-1;
}
}
return -1;
时间复杂性为O(logn)
-
5.2 实现循环赛日程表利用的算法是分治策略
-
5.3实现棋盘覆盖算法利用的算法是分治法
-
5.4 Strassen矩阵乘法是利用分治策略实现的
-
5.5 分治策略不需满足子问题一样
-
5.6 实现大整数的乘法是利用分治策略
-
5.7 快速排序算法基于分治策略
-
5.8 快速排序
void QuickSort(Type a[], int p, int r)
{
if(p < r){
int q = Partition(a, p, r);
QuickSort(a, p, q-1);
QuickSort(a, q+1, r);
}
}
-
5.9 分治法能解决的问题的特征:
1.问题规模缩小到一定程度可以很容易被解决
2.该问题具有最优子结构性质
3.分解出来的子问题的解合并即为该问题的解
4.子问题之间相互独立 -
5.10 合并排序:
void MergeSort(Type a[], int left, int right){
if(left6.分支限界法
- 6.1最大效益优先(最小损耗优先)或广度搜索优先是分支限界法的搜索方式
- 6.2 分支限界法解决最大团问题,或节点表的组织形式是:最大堆
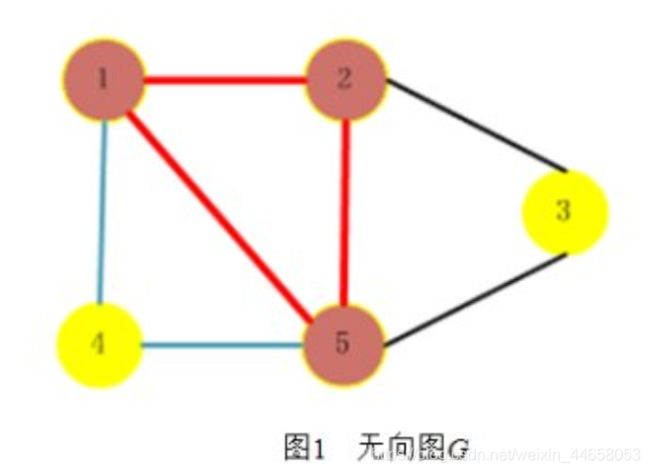
- 最大团问题:
//以上图为例子,其实就是先选住1,2,到3的时候发现和1没相连,所以3不行
//到4,24,34没连通,不行
//到5,15,25,45都连通了,于是第一个最大团就是125
void Backtrack(int i){
if(i > n){ //n为元素个数,i为当前层数
//如:1->2->3->4->5的搜索顺序,1的i为2,因为前面有一个活结点连接着12345.
for(int j = 1; j <= n; j++){
bestx[j] = x[j]; //记录最大团的每个元素
}
bestn = cn; //最大团的元素为当前团的元素
return;
}
bool Ok = true; //检查边是否连通
for(int j = 1; j < i; j++){
if(x[j] && !a[i][j]) Ok = false;
//如果当前结点为可用结点,但连接两点的边不通,Ok为false
}
if(Ok){ //进入左子树
cn++; //结点数+1
x[i] = 1; //当前结点可用
Backtrack(i+1); //寻找下一个数
cn--; //返回上一个结点,结点数-1
}
if(cn+n-i > bestn){ //进入右子树
x[i] = 0; //上一个已经用过的结点剪掉
Backtrack(i+1); //开始进入右子树搜寻
}
}
-
6.3 分支限界法解决旅行售货员问题,活结点表的组织形式是最小堆(要排序)
-
6.4分支限界法设计算法的步骤:
1.根据问题定义解空间
2.确定易于搜索的解空间结构
3.以广度优先或最大效益优先的方式搜索解空间,并用剪枝函数避免无效搜索 -
6.5常见的两种分支限界法的算法框架
1.队列式分支限界法,按照队列先进先出的原则选取下一个结点为扩展结点
2.优先队列分治限界法,按照优先队列,选取优先级最高的结点为当前扩展结点 -
6.6 分支限界法的搜索策略:
在扩展结点处,先生成所有子节点,然后在当前活结点表中选择下一个结点作为扩展结点。为了提高搜索速度,计算一个函数(限界),根据函数值,在活结点表中选择下一个结点作为扩展结点,使搜索向最优解的分支推进,以便更早找到最优解
7.全排列问题:
void perm(Type list[], int k, int m){
if(k == m){
for(int i = 0; i < m; i++) 输出list[i];
} //输出当前排列
else{ //最先交换的是3,3,然后交换3,4
for(int i = k; i<=m; i++){ //产生多个排列
swap(list[k], list[i]); //最先输出的时候k为3,交换3,3等于没有
perm(list, k+1, m); //最先输出的是perm(list,4,4)
swap(list[k], list[i]);
}
}
}
8.分治法和动态规划法的异同点:
相同:将待求解的问题分解成若干个子问题,先解子问题,然后从这些子问题的解得到原问题的解
不同:动态规划的子问题不是相互独立的,分治法的子问题相互独立
9.回溯法和分支限界法的异同:
相同:都是一种在问题的解空间树T中搜索问题解的算法
不同:
1.搜索方式不同:回溯法是深度优先 分支限界是广度优先
2.存储空间的要求不同:回溯法是堆栈,分支限界是队列
3.结点的存储特性:回溯法活结点的所有可行子节点被遍历后才从栈中弹出 ;分治限界,每个结点只有一次成为活结点的机会
4.求解目标不同:回溯法适用满足约束条件的全部解; 分支限界满足约束条件的特定解