用cubemx创建stm32独立看门狗的线程,并定时喂狗
一、STM32cubeMX创建项目
STM32使用的是nucleostm32f411re官方的开发板
下面是RT-Thread官网下的教程,帮你更方便的创建基于RT-Thread实时操作系统的STM32开发环境。
RT-Thread帮助文档
二、FinSH组件的移植
使用Finsh组件三步骤:1.实现该函数及rt_hw_console_output函数;2.rtconfig.h中开启RT_USING_FINSH宏;3.添加Finsh组件(cmd.c、msh.c、shell.c)
FinSH组件的文档
在board.c文件中的void rt_hw_board_init()函数中添加串口初始化代码,stm32f411re中使用的是默认的串口2。
void rt_hw_board_init()
{
/* System Clock Update */
SystemCoreClockUpdate();
/*USART2_UART_Init */
MX_USART2_UART_Init();
/* System Tick Configuration */
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
并在该文件的最下方添加 void rt_hw_console_output(const char *str)和char rt_hw_console_getchar(void)
void rt_hw_console_output(const char *str)
{
rt_size_t i = 0, size = 0;
char a = '\r';
__HAL_UNLOCK(&huart2);
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if (*(str + i) == '\n')
{
HAL_UART_Transmit(&huart2, (uint8_t *)&a, 1, 1);
}
HAL_UART_Transmit(&huart2, (uint8_t *)(str + i), 1, 1);
}
}
char rt_hw_console_getchar(void)
{
int ch ;
HAL_UART_Receive(&huart2, (uint8_t *)&ch, 1, HAL_MAX_DELAY);
return ch;
}
然后就可以愉快的在窗口助手下面使用FinSH组件了。

IWDT独立看门狗的环境搭建
在上面创建的环境下需要自己在Drivers文件下添加stm32f4xx_hal_iwdg.c 然后找到stm32f4xx_hal_conf.h开启#define HAL_IWDG_MODULE_ENABLED 因为在一开始用cubeMX创建项目是并没有开启IWDG,当然也可以直接使用cubeMX开启IWDG
再者还需要打开rtconf.h文件里开启#define RT_USING_HEAP
// Memory Management Configuration
// Dynamic Heap Management
// Dynamic Heap Management
#define RT_USING_HEAP
这样为了给线程分配堆空间
IWDT独立看门狗的程序编写
在创建的.c文件中编写以下程序
#include "iwdt.h"
#include "stm32f4xx_hal_def.h"
#include "stm32f4xx_hal.h"
#include "stm32f4xx_hal_iwdg.h"
#include 在main.c中添加以下代码
/* USER CODE BEGIN 2 */
if (__HAL_RCC_GET_FLAG(RCC_FLAG_IWDGRST) != RESET)
{
/* 独立看门狗复位 */
/* 亮红灯 */
GPIOA->BSRR = 1<<(5) ; //PB5?????,??LED;
/* 清除标志 */
__HAL_RCC_CLEAR_RESET_FLAGS();
/*如果一直不喂狗,会一直复位,加上前面的延时,会看到红灯闪烁
在1s 时间内喂狗的话,则会持续亮绿灯*/
}
else
{
/*不是独立看门狗复位(可能为上电复位或者手动按键复位之类的) */
/* 亮蓝灯 */
GPIOA->BSRR = 1<<(5+16) ; //PB5?????,??LED;
}
IWDG_Config(IWDG_PRESCALER_64 ,625);
TaskInit();
/* USER CODE END 2 */
用cubeMX生成的代码有放在其指定的位置里面,不然当重新用cubeMX生成代码时,程序将会被覆盖。
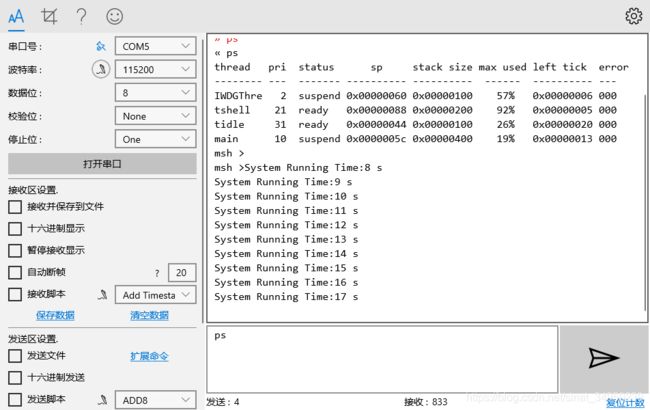
下面就是实验结果
IWDT代码链接