Openwrt编写GPIO驱动控制LED
一、驱动的编写
1.创建gpio_control_driver文件夹
2.在gpio_control_driver文件夹下再创建src文件夹以及Makefile文件
Makefile文件如下:
include $(TOPDIR)/rules.mk
include $(INCLUDE_DIR)/kernel.mk
PKG_NAME:=gpio_control_driver
PKG_RELEASE:=1
include $(INCLUDE_DIR)/package.mk
define KernelPackage/gpio_control_driver
SUBMENU:=Other modules
DEPENDS:=@GPIO_SUPPORT
TITLE:=Driver for JS9331/JS7628 gpios control
FILES:=$(PKG_BUILD_DIR)/gpio_control_driver.ko
KCONFIG:=
AUTOLOAD:=$(call AutoLoad,30,gpio_control_driver)
endef
define KernelPackage/gpio_control_driver/description
Kernel module to control gpios for JS9331 and JS7628
endef
EXTRA_KCONFIG:= \
CONFIG_GPIO_CONTROL_DRIVER=m
define Build/Prepare
mkdir -p $(PKG_BUILD_DIR)
$(CP) ./src/* $(PKG_BUILD_DIR)/
endef
define Build/Compile
$(MAKE) -C "$(LINUX_DIR)" \
CROSS_COMPILE="$(TARGET_CROSS)" \
ARCH="$(LINUX_KARCH)" \
SUBDIRS="$(PKG_BUILD_DIR)" \
EXTRA_CFLAGS="$(BUILDFLAGS)" \
$(EXTRA_KCONFIG)
endef
$(eval $(call KernelPackage,gpio_control_driver))3.在src文件夹下再创建Makefile,Kconfig文件以及gpio对应的.c,.h驱动文件
Makefile文件:
obj-${CONFIG_GPIO_CONTROL_DRIVER} += gpio_control_driver.oKconfig文件:
config GPIO_CONTROL_DRIVER
tristate "Gpio control driver for AR9344"
depends on GENERIC_GPIO
驱动文件gpio_control_driver.c:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "gpio_control_driver.h"
static int gpio_control_open(struct inode *pinode, struct file *pfile)
{
printk("***%s***\n",__func__);
//initialize
return 0;
}
static int gpio_control_release(struct inode *pinode, struct file *pfile)
{
printk("***%s***\n",__func__);
return 0;
}
static long gpio_control_ioctl(struct file *pfile, unsigned int cmd, unsigned long arg)
{
int ret;
unsigned char gpio_number;
unsigned char gpio_value;
//printk("***%s***\n",__func__);
//printk("cmd:0x%02X\n", cmd);
gpio_number = GET_GPIO_NUM(arg);
gpio_value = GET_GPIO_VALUE(arg);
//printk("gpio number:%d\n", gpio_number);
//printk("gpio value:0x%02X\n", gpio_value);
switch (cmd){
case GPIO_CONTROL_SET_OUT:
//printk("command: GPIO_CONTROL_SET_OUT\n");
ret = gpio_direction_output(gpio_number, gpio_value);
if (ret < 0){
//printk("###gpio_direction_output ERROR: can't set gpio %d output###\n", gpio_number);
return -1;
}
//printk("command: GPIO_CONTROL_SET_OUT done\n");
break;
case GPIO_CONTROL_SET_IN:
ret = gpio_direction_input(gpio_number);
if (ret < 0){
//printk("###gpio_direction_input ERROR: can't set gpio %d input###\n", gpio_number);
return -1;
}
//printk("command: GPIO_CONTROL_SET_IN\n");
break;
#if 0
case GPIO_CONTROL_GET_DIRECTION:
printk("command: GPIO_CONTROL_GET_DIRECTION\n");
break;
#endif
case GPIO_CONTROL_SET_VALUE:
gpio_set_value(gpio_number, gpio_value);
//printk("command: GPIO_CONTROL_SET_VALUE\n");
break;
case GPIO_CONTROL_GET_VALUE:
ret = gpio_get_value(gpio_number);
if (ret < 0){
//printk("###gpio_get_value ERROR: can't get gpio %d value###\n", gpio_number);
return -1;
}
//printk("command: GPIO_CONTROL_GET_VALUE\n");
break;
case GPIO_CONTROL_REQUEST_GPIO:
//printk("command: GPIO_CONTROL_REQUEST_ONE\n");
if (0 > gpio_request(gpio_number, "gpio_ctrl")){
//printk("###gpio_request ERROR: can't request %d pin for output###\n", gpio_number);
return -1;
}
//printk("command: GPIO_CONTROL_REQUEST_GPIO done\n");
break;
case GPIO_CONTROL_FREE_GPIO:
gpio_free(gpio_number);
//printk("command: GPIO_CONTROL_FREE_GPIO done\n");
break;
default:
printk("***Unknown command:0x%02X\n***\n", cmd);
break;
}
return 0;
}
static const struct file_operations gpio_control_ops = {
.owner = THIS_MODULE,
.open = gpio_control_open,
.release = gpio_control_release,
.unlocked_ioctl = gpio_control_ioctl,
};
static struct miscdevice s_gpio_control_dev = {
.minor = MISC_DYNAMIC_MINOR,
.fops = &gpio_control_ops,
.name = GPIO_CONTROL_DEV_NAME
};
//module initialize function
static int gpio_control_init(void)
{
int result;
//initialize and register device
result = misc_register(&s_gpio_control_dev);
if (result != 0) {
//printk("###misc_register error###\n");
return -1;
}
printk("**gpio_control module initiation OK**\n");
return result;
}
//module exit fuc
void gpio_control_exit(void)
{
//unregister what we registered
misc_deregister(&s_gpio_control_dev);
printk("**gpio_control module exit**\n");
}
module_init(gpio_control_init);
module_exit(gpio_control_exit);
MODULE_VERSION("V1.0");
MODULE_AUTHOR("wq ");
MODULE_LICENSE("Dual BSD/GPL"); 驱动文件gpio_control_driver.h:
#ifndef GPIO_CONTROL_DRIVER_H_
#define GPIO_CONTROL_DRIVER_H_
#include
#include
#include
#define GET_GPIO_NUM(arg1) (unsigned char)((arg1 >> 24) & 0xff)
#define GET_GPIO_VALUE(arg1) (unsigned char)((arg1 >> 16) & 0xff)
#define GPIO_CONTROL_MAJOR 99//device major number
#define GPIO_CONTROL_DEV_NAME "gpio_control"
//IOCTRL CMDs
#define GPIO_CONTROL_SET_OUT 0x01
#define GPIO_CONTROL_SET_IN 0x02
//#define GPIO_CONTROL_GET_DIRECTION 0x03
#define GPIO_CONTROL_SET_VALUE 0x04
#define GPIO_CONTROL_GET_VALUE 0x05
#define GPIO_CONTROL_REQUEST_GPIO 0x06
#define GPIO_CONTROL_FREE_GPIO 0x07
#endif /* GPIO_CONTROL_DRIVER_H_ */
二、驱动的编译安装
1.将gpio_control_driver文件夹拷贝到openwrt源码目录下的/package/kernel/下
2.进入openwrt的/目录,输入
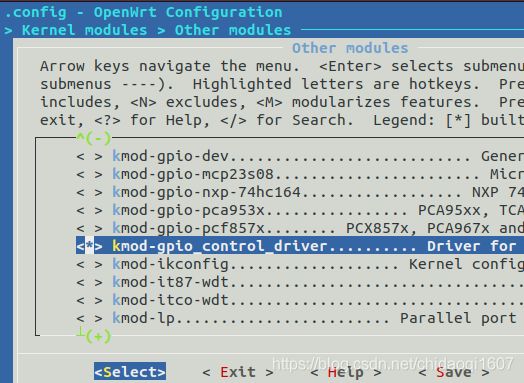
make menuconfig3.配置如下
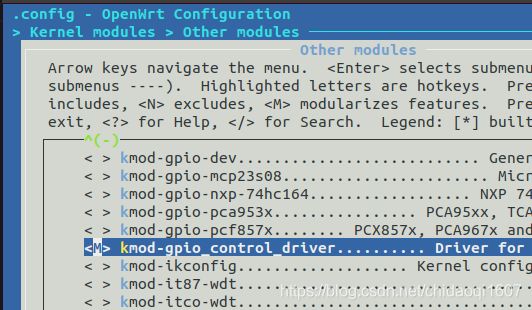
4.编译
make V=s5.在源码/bin/targets/ath79/generic/packages下找到kmod-gpio_control_driver_4.19.57-1_mips_24kc.ipk,通过scp上传到板子上。
6.安装驱动
在板子上执行
opkg install kmod-gpio_control_driver_4.19.57-1_mips_24kc.ipk在/lib/modules/4.19.57/下可以找到gpio_control_driver.ko,执行
insmod gpio_control_driver.ko这样驱动已经成功安装,如果想卸载,可以执行
rmmod gpio_control_driver.ko此时,可以看见在板子的/dev/下存在gpio_control驱动
7.将驱动加载到内核
我们也可以直接将驱动加载到内核,这样就不需要手动安装了,只要将内核配置改为
然后还是去openwrt的/目录下执行
make V=s将/bin/targets/ath79/generic/下生成的新固件(.bin文件)更新下系统,等系统重启完可以看见在板子的/dev/下存在gpio_control驱动
三、驱动的测试
1.编写测试程序
驱动测试文件gpio_control_test.c:
#include
#include
#include
#include
#include
#include
#include
#include
#include "gpio_control_test.h"
static unsigned char gpio_pin;//define GPIOs to be use
static int gpio_dev_fd;
void demo1_release(int signal_no)
{
ioctl(gpio_dev_fd, GPIO_CONTROL_SET_IN, GPIO_IOCTL_PRAM(gpio_pin, 0));
ioctl(gpio_dev_fd, GPIO_CONTROL_FREE_GPIO, GPIO_IOCTL_PRAM(gpio_pin, 0));
exit(0);
}
//指定管脚拉高, 拉低
int set_gpio(unsigned char pin, int state)
{
if(state == 1)
{
ioctl(gpio_dev_fd, GPIO_CONTROL_SET_VALUE, GPIO_IOCTL_PRAM(pin, 1));
}
else if(state == 0)
{
ioctl(gpio_dev_fd, GPIO_CONTROL_SET_VALUE, GPIO_IOCTL_PRAM(pin, 0));
}
else
{
printf("No such set\n");
goto ERROR;
}
return 0;
ERROR:
return -1;
}
int gpio_init(int pin)
{
int ret;
gpio_pin = pin;
gpio_dev_fd = open(GPIO_CONTROL_DEVICE_PATH, O_RDWR);//open gpio device
if (gpio_dev_fd < 0){
printf("###open %s ERROR###\n", GPIO_CONTROL_DEVICE_PATH);
goto ERROR;
}else{
printf("***open %s success***\n", GPIO_CONTROL_DEVICE_PATH);
}
ret = ioctl(gpio_dev_fd, GPIO_CONTROL_REQUEST_GPIO, GPIO_IOCTL_PRAM(pin, 0));
if (ret < 0){
printf("###request GPIO %d error###", pin);
goto ERROR;
}
ret = ioctl(gpio_dev_fd, GPIO_CONTROL_SET_OUT, GPIO_IOCTL_PRAM(pin, 0));
if (ret < 0){
printf("###set GPIO %d output error###", pin);
goto ERROR;
}
signal(SIGINT, demo1_release);//register terminal signal
return 0;
ERROR:
return -1;
}
int main()
{
gpio_init(42);
gpio_init(40);
gpio_init(39);
while(1)
{
set_gpio(42, 1);
usleep(200000);
set_gpio(42, 0);
usleep(200000);
set_gpio(40, 1);
usleep(200000);
set_gpio(40, 0);
usleep(200000);
set_gpio(39, 1);
usleep(200000);
set_gpio(39, 0);
usleep(200000);
}
}
驱动测试文件gpio_control_test.h:
#ifndef GPIO_CONTROL_TEST_H_
#define GPIO_CONTROL_TEST_H_
#define GPIO_CONTROL_DEVICE_PATH "/dev/gpio_control"
#define GPIO_IOCTL_PRAM(gpio_num, arg1) (((unsigned long)gpio_num << 24) + ((unsigned long)arg1 << 16))
#define GET_GPIO_NUM(arg1) (unsigned char)((arg1 >> 24) & 0xff)
#define GET_GPIO_VALUE(arg1) (unsigned char)((arg1 >> 16) & 0xff)
//IOCTRL CMDs
#define GPIO_CONTROL_SET_OUT 0x01
#define GPIO_CONTROL_SET_IN 0x02
//#define GPIO_CONTROL_GET_DIRECTION 0x03
#define GPIO_CONTROL_SET_VALUE 0x04
#define GPIO_CONTROL_GET_VALUE 0x05
#define GPIO_CONTROL_REQUEST_GPIO 0x06
#define GPIO_CONTROL_FREE_GPIO 0x07
int set_gpio(unsigned char pin, int state);
int gpio_init(int pin);
void delay_ms(int ms);
#endif
2.编译
mips-openwrt-linux-gcc -o gpio_control_test gpio_control_test.c
3.将gpio_control_test通过scp上传到板子上并执行,可以看到3个灯的闪烁