PCL:利用霍夫变换进行直线检测
最近涉及到直线检测的东西,所以查了查资料,发现大多数都是图像方面的,没查到点云方面的资料,给出的源码很多也是利用opencv完成,有点心累,所以还是自己写一下霍夫变换吧。
具体原理,看大神解释(直线检测,圆检测等----):https://blog.csdn.net/shanchuan2012/article/details/74010561
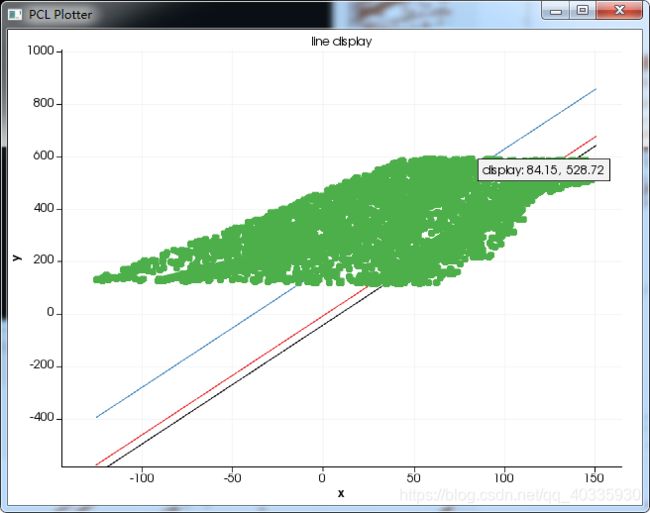
需求:在XOY平面内,检测混有噪声的点云数据中的直线。
实现步骤:
- 数据量大的情况,可以进行一下体素化的下采样,不改变整体的点云分布。
- 将点云在二维平面内画规则格网,横轴为角度,纵轴为长度,设定步长,我取了横轴1度一个步长,纵轴0.5米,将点云从y=kx+b空间按照下面的公式转换到霍夫空间。

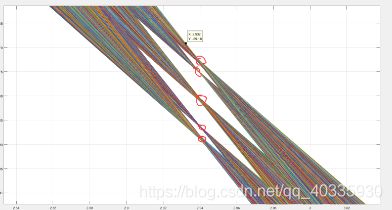
截距式的直线方程,往往会交于一点,为了避免斜率无穷大的情况,用了极坐标表示直线,道理雷同,会交于一点。


- 接下来就是求交点的过程,因为通常情况下,点为离散点,不可能完全交于一个点,所以,需要求局部极值大点。(下图霍夫空间中有五个极值点,说明有五条直线,如何将五个节点求出来是个问题)。

我求极值点的方法:
求解每个点、每个角度步长对应的长度值,算一下它分属于哪一个格网,将所有点进行计算,对格网内数值进行累加(到最后平均数即为该交点的长度值,即rho值),对每个格网进行计数,如果存在格网内点数量比邻域8格网内的点数量都多,我们认为他是极值点。
但是,会发现其实极值点的数还是挺多的,远不止五个,所以还需要加入另一个阈值,格网内的最小点数,大于它才能判断为极值点。
所以,这个参数其实挺难确定的,如果事先知道有几条直线,就省事了—所以,选择了两种方式进行计算(1.指定格网最小数量阈值,2,指定格网最小数量阈值和直线个数阈值),看到底符合哪个需求了-----
上代码,vs2013+pcl1.8.0
(运行效率低的话,可以试试release模式下跑):
可以提供一下示例数据:https://pan.baidu.com/s/1HWIHyxEVENzuCG0_OyzX0A
//HOUGH_LINE.h文件
#pragma once
#include
#include
#include
#include
#include
#include
#include
#include
using namespace pcl;
using namespace Eigen;
using namespace std;
typedef PointXYZ PointT;
class HOUGH_LINE
{
public:
HOUGH_LINE();
~HOUGH_LINE();
template void vector_sort(std::vector vector_input, std::vector &idx);
inline void setinputpoint(PointCloud::Ptr point_);
void VoxelGrid_(float size_, PointCloud::Ptr &voxel_cloud);
void draw_hough_spacing();
void HOUGH_line(int x_setp_num, double y_resolution, int grid_point_number_threshold, vector&K_, vector&B_, int line_num=-1);
void draw_hough_line();
private:
PointCloud::Ptr cloud;
int point_num;
PointT point_min;
PointT point_max;
vector>result_;
};
templatevoid
HOUGH_LINE::vector_sort(std::vector vector_input, std::vector &idx){
idx.resize(vector_input.size());
iota(idx.begin(), idx.end(), 0);
sort(idx.begin(), idx.end(), [&vector_input](size_t i1, size_t i2) { return vector_input[i1] > vector_input[i2]; });
}
inline void HOUGH_LINE::setinputpoint(PointCloud::Ptr point_){
cloud = point_;
point_num = cloud->size();
}
//HOUGH_LINE.cpp文件
#include "HOUGH_LINE.h"
HOUGH_LINE::HOUGH_LINE()
{
}
HOUGH_LINE::~HOUGH_LINE()
{
cloud->clear();
result_.clear();
}
void HOUGH_LINE::VoxelGrid_(float size_,PointCloud::Ptr &voxel_cloud){
PointCloud::Ptr tem_voxel_cloud(new PointCloud);
VoxelGrid vox;
vox.setInputCloud(cloud);
vox.setLeafSize(size_, size_, size_);
vox.filter(*tem_voxel_cloud);
cloud = tem_voxel_cloud;
voxel_cloud = tem_voxel_cloud;
point_num = cloud->size();
}
void HOUGH_LINE::draw_hough_spacing(){
visualization::PCLPlotter *plot_(new visualization::PCLPlotter("Elevation and Point Number Breakdown Map"));
plot_->setBackgroundColor(1, 1, 1);
plot_->setTitle("hough space");
plot_->setXTitle("angle");
plot_->setYTitle("rho");
vector>data_;
double x_resolution1 = M_PI / 181;
double a_1, b_1;
for (int i_point = 0; i_point < point_num; i_point++)
{
a_1 = cloud->points[i_point].x;
b_1 = cloud->points[i_point].y;
for (int i = 0; i < 181; i++)
{
data_.push_back(make_pair(i*x_resolution1, a_1 * cos(i*x_resolution1) + b_1 * sin(i*x_resolution1)));
}
plot_->addPlotData(data_,"line",vtkChart::LINE);//X,Y均为double型的向量
data_.clear();
}
plot_->setShowLegend(false);
plot_->plot();//绘制曲线
}
void HOUGH_LINE::HOUGH_line(int x_setp_num, double y_resolution, int grid_point_number_threshold, vector&K_, vector&B_,int line_num){
vector>all_point_row_col;
vector Grid_Index;
getMinMax3D(*cloud, point_min, point_max);
double x_resolution = M_PI / x_setp_num;
int raster_rows, raster_cols;
raster_rows = ceil((M_PI - 0) / x_resolution);
raster_cols = ceil((point_max.y + point_max.x) / y_resolution) * 2;
MatrixXi all_row_col(raster_cols, raster_rows);//存储每个格网内的个数
all_row_col.setZero();
MatrixXd all_row_col_mean(raster_cols, raster_rows);//存储每个格网内的均值
//统计每个格网内的数量,和rho均值
all_row_col_mean.setZero();
double a_, b_;
for (int i_point = 0; i_point < point_num; i_point++){
a_ = cloud->points[i_point].x;
b_ = cloud->points[i_point].y;
for (int i_ = 0; i_ < x_setp_num; i_++)
{
double theta = 0 + i_*x_resolution + x_resolution / 2;
double rho = a_ * cos(theta) + b_ * sin(theta);
//double rho = line_(theta,a_,b_);
double idx = ceil(abs(rho / y_resolution));
if (rho >= 0)
{
all_row_col(raster_cols / 2 - idx, i_) += 1;
all_row_col_mean(raster_cols / 2 - idx, i_) += rho;
}
else{
all_row_col(raster_cols / 2 + idx, i_) += 1;
all_row_col_mean(raster_cols / 2 + idx, i_) += rho;
}
}
}
//求解邻域
int min_num_threshold = grid_point_number_threshold;
vector>result_jz;
//vector>result_;
vectortem_nebor;
vectornum_grid;
for (int i_row = 0; i_row < all_row_col.rows(); i_row++)
{
for (int i_col = 0; i_col < all_row_col.cols(); i_col++)
{
if (i_row == 0)
{
if (i_col == 0)
{
tem_nebor.push_back(all_row_col(i_row, i_col + 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col + 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col));
}
if (i_col == all_row_col.cols() - 1)
{
tem_nebor.push_back(all_row_col(i_row, i_col - 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col));
tem_nebor.push_back(all_row_col(i_row + 1, i_col - 1));
}
if (i_col != all_row_col.cols() - 1 && i_col != 0)
{
tem_nebor.push_back(all_row_col(i_row, i_col - 1));
tem_nebor.push_back(all_row_col(i_row, i_col + 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col));
tem_nebor.push_back(all_row_col(i_row + 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col + 1));
}
}
if (i_row == all_row_col.rows() - 1)
{
if (i_col == 0)
{
tem_nebor.push_back(all_row_col(i_row - 1, i_col));
tem_nebor.push_back(all_row_col(i_row - 1, i_col + 1));
tem_nebor.push_back(all_row_col(i_row, i_col + 1));
}
if (i_col == all_row_col.cols() - 1)
{
tem_nebor.push_back(all_row_col(i_row - 1, i_col));
tem_nebor.push_back(all_row_col(i_row - 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row, i_col - 1));
}
if (i_col != all_row_col.cols() - 1 && i_col != 0)
{
tem_nebor.push_back(all_row_col(i_row, i_col - 1));
tem_nebor.push_back(all_row_col(i_row, i_col + 1));
tem_nebor.push_back(all_row_col(i_row - 1, i_col));
tem_nebor.push_back(all_row_col(i_row - 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row - 1, i_col + 1));
}
}
if (i_row != all_row_col.rows() - 1 && i_row != 0)
{
if (i_col == 0)
{
tem_nebor.push_back(all_row_col(i_row, i_col + 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col));
tem_nebor.push_back(all_row_col(i_row + 1, i_col + 1));
tem_nebor.push_back(all_row_col(i_row - 1, i_col));
tem_nebor.push_back(all_row_col(i_row - 1, i_col + 1));
}
if (i_col == all_row_col.cols() - 1)
{
tem_nebor.push_back(all_row_col(i_row - 1, i_col));
tem_nebor.push_back(all_row_col(i_row - 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row, i_col - 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col));
}
if (i_col != all_row_col.cols() - 1 && i_col != 0)
{
tem_nebor.push_back(all_row_col(i_row, i_col - 1));
tem_nebor.push_back(all_row_col(i_row, i_col + 1));
tem_nebor.push_back(all_row_col(i_row - 1, i_col));
tem_nebor.push_back(all_row_col(i_row - 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row - 1, i_col + 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col));
tem_nebor.push_back(all_row_col(i_row + 1, i_col - 1));
tem_nebor.push_back(all_row_col(i_row + 1, i_col + 1));
}
}
int max_tem = *max_element(tem_nebor.begin(), tem_nebor.end());
tem_nebor.clear();
if (all_row_col(i_row, i_col) > max_tem)
{
num_grid.push_back(all_row_col(i_row, i_col));
double tem_ = all_row_col_mean(i_row, i_col) / all_row_col(i_row, i_col);
result_jz.push_back(make_pair(0 + i_col*x_resolution + x_resolution / 2, tem_));
if (all_row_col(i_row, i_col) > min_num_threshold)
{
result_.push_back(make_pair(0 + i_col*x_resolution + x_resolution / 2, tem_));
}
}
}
}
if (line_num!=-1)
{
result_.clear();
vectoridx_;
vector_sort(num_grid, idx_);
if (result_jz.size() < line_num)
{
line_num = result_jz.size();
}
for (int i_ = 0; i_ < line_num; i_++)
{
result_.push_back(result_jz[idx_[i_]]);
}
}
for (int i_hough = 0; i_hough < result_.size(); i_hough++){
B_.push_back(result_[i_hough].second / sin(result_[i_hough].first));
K_.push_back(-cos(result_[i_hough].first) / sin(result_[i_hough].first));
}
}
void HOUGH_LINE::draw_hough_line(){
visualization::PCLPlotter *plot_line(new visualization::PCLPlotter);
plot_line->setBackgroundColor(1, 1, 1);
plot_line->setTitle("line display");
plot_line->setXTitle("x");
plot_line->setYTitle("y");
vectorx_, y_;
for (int i_point = 0; i_point < point_num; i_point++)
{
x_.push_back(cloud->points[i_point].x);
y_.push_back(cloud->points[i_point].y);
}
for (int i_hough = 0; i_hough < result_.size(); i_hough++){
std::vector func1(2, 0);
func1[0] = result_[i_hough].second / sin(result_[i_hough].first);
func1[1] = -cos(result_[i_hough].first) / sin(result_[i_hough].first);
plot_line->addPlotData(func1, point_min.x, point_max.x);
}
plot_line->addPlotData(x_, y_, "display", vtkChart::POINTS);//X,Y均为double型的向量
plot_line->setShowLegend(false);
plot_line->plot();//绘制曲线
//plot_line->spin();
}
//主函数,调用
#include "HOUGH_LINE.h"
int main()
{
PointCloud::Ptr cloud(new PointCloud);
pcl::io::loadPCDFile("C:\\Users\\admin\\Desktop\\222.pcd", *cloud);
PointCloud::Ptr VOXEL;
HOUGH_LINE hough;
hough.setinputpoint(cloud);
hough.VoxelGrid_(1.0, VOXEL);
hough.draw_hough_spacing();
vectorK_,B_;
hough.HOUGH_line(181, 0.5, 400, K_, B_);//按阈值自动检测
hough.HOUGH_line(181, 0.5, 400, K_, B_,3);//指定只选择极大值最大的3条直线
hough.draw_hough_line();
return 0;
}
提供的示例数据的霍夫空间展示:

结果还是不错的,就是格网最低数量阈值不太好调,也是比较尴尬。
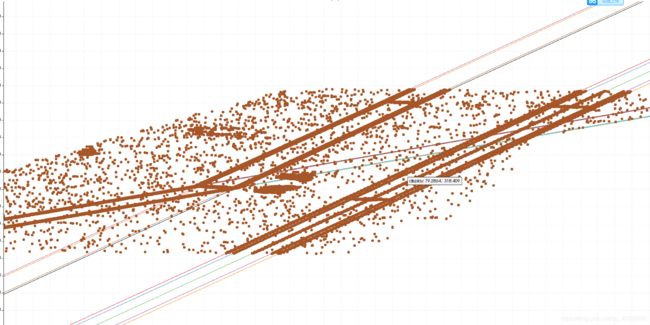
局部放大图:…

手动选择检测的条数: