本系列是台湾大学资讯工程系林軒田(Hsuan-Tien Lin)教授开设的《机器学习基石》课程的梳理。重在梳理,而非详细的笔记,因此可能会略去一些细节。
该课程共16讲,分为4个部分:
- 机器什么时候能够学习?(When Can Machines Learn?)
- 机器为什么能够学习?(Why Can Machines Learn?)
- 机器怎样学习?(How Can Machines Learn?)
- 机器怎样可以学得更好?(How Can Machines Learn Better?)
本文是第4部分,对应原课程中的13-16讲。
本部分的主要内容:
- 过拟合问题,过拟合与噪声、目标函数复杂度的关系;
- 正则化,正则化与VC理论的联系;
- 验证,留一交叉验证和V-折交叉验证;
- 三个学习原则,即奥卡姆剃刀、抽样偏差和数据窥探。
1 过拟合问题
1.1 过拟合的发生
假设现在用带很小噪声的2次多项式生成了5个样本,对于这5个样本,其实用4次多项式就可以完美拟合它:

这样做可使\(E_\text{in}=0\),但\(E_\text{out}\)却会非常大。
如果出现\(E_\text{in}\)很小,\(E_\text{out}\)很大的情况,就是出现了不好的泛化(bad generalization)。如果在训练的过程中,\(E_\text{in}\)越来越小,\(E_\text{out}\)越来越大,就称为过拟合(overfitting)。
噪声和数据规模都会影响过拟合。先来看以下两个数据集:
- 数据由10次多项式生成,有一些噪声;
- 数据由50次多项式生成,无噪声。
数据集图像如下:

如果我们用2次和10次多项式分别拟合以上两个数据集,那么在从\(g_2 \in \mathcal{H}_2\)到\(g_{10} \in \mathcal{H}_{10}\)的过程中,会发生过拟合吗?
拟合结果如下:

比较后发现,在两个数据集中,都发生了过拟合!
来看学习曲线,当\(N\to \infty\)时显然\(\mathcal{H}_{10}\)会有更小的\(\overline{E_{out}}\),但\(N\)较小时它会有很大的泛化误差。灰色区域就是过拟合发生的区域。

其实对于由无噪声的50次多项式生成的数据,“目标函数的复杂度”本身就可以看作类似的噪声。
接下来做个更细节的实验。用
生成\(N\)个数据,其中\(\epsilon\)是独立同分布的高斯噪声,噪声水平为\(\sigma^2\),\(f(x)\)关于复杂度水平\(Q_f\)是均匀分布的。也就是说,目标函数有\(Q_f\)和\(\sigma^2\)两个变量。
然后,分别固定\(Q_f=20\)和\(\sigma^2=0.1\),还是分别用2次和10次多项式拟合数据,并用\(E_\text{out}(g_{10})-E_\text{out}(g_{2})\)度量过拟合水平。结果如下:

颜色偏红的区域,就是发生了过拟合。
加上去的\(\sigma^2\)高斯噪声可称为stochastic noise,而目标函数的次数\(Q_f\)也有类似噪声的影响,因此可叫deterministic noise。
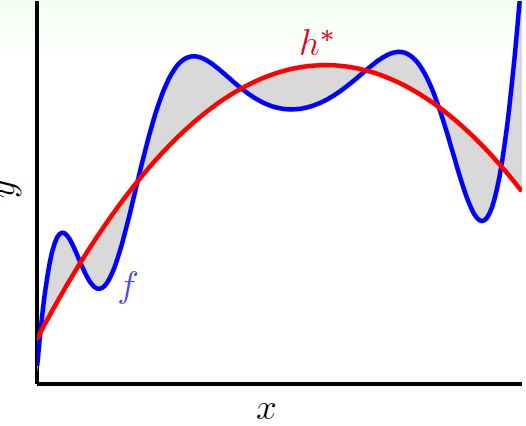
如果\(f\notin \mathcal{H}\),那么\(f\)一定有某些部分就无法被\(\mathcal{H}\)所捕捉到,最好的\(h^*\in\mathcal{H}\)与\(f\)的差就是deterministic noise,它的表现与随机噪声没什么不一样(与伪随机数生成器类似)。它与stochastic noise的不同之处在于,它与\(\mathcal{H}\)有关,且对于每个\(x\),它的值是确定的:
1.2 过拟合的处理
一般来说,处理过拟合的思路有以下几种:
- 从简单的模型开始;
- 数据清洗(data cleaning),将错误的数据修正(如更正它的标签类别);
- 数据剪枝(data pruning),删去离群点(outlier);
- data hinting,当样本量不够时,可以对现有样本做些简单的处理,增加样本量,如在数字分类中,可以将数据微微旋转或平移而不改变它们的标签,这样就可增大样本量;
- 正则化(regularization),见下节;
- 验证(validation),见后文。
2 正则化(regularization)
2.1 正则化
正则化的思想是好比从\(\mathcal{H}_{10}\)“逐步回退”到\(\mathcal{H}_{2}\)。这个名字的由来是在早期做函数逼近(function approximation)时,有很多问题是ill-posed problems,即有很多函数都是满足问题的解,所以要加入一些限制条件。从某种意义上说,机器学习中的过拟合也是“正确的解太多”的问题。
\(\mathcal{H}_{10}\)中假设的一般形式为
而\(\mathcal{H}_{2}\)中假设的一般形式为
其实只要限制\(w_3=w_4=\cdots=w_{10}=0\),就会有\(\mathcal{H}_{10}=\mathcal{H}_{2}\)。如果在用\(\mathcal{H}_{10}\)时加上这个限制,其实就是在用\(\mathcal{H}_2\)做机器学习。
\(\mathcal{H}_2\)的灵活性有限,但\(\mathcal{H}_{10}\)又很危险,那有没有折中一些的假设集呢?不妨把这个条件放松一些,变成\(\sum\limits_{q=0}^{10}\mathbf{1}_{[w_1\ne 0]}\le 3\),记在该限制下的假设集为\(\mathcal{H}_2'\),有\(\mathcal{H}_{2}\subset \mathcal{H}_{2}' \subset \mathcal{H}_{10}\),即它比\(\mathcal{H}_{2}\)更灵活,但又没有\(\mathcal{H}_{10}\)那么危险。
在\(\mathcal{H}_{2}'\)下,求解的问题转化成了
这是个NP-hard问题,复杂度很高。不如再将它变为
记该假设集为\(\mathcal{H}(C)\),它与\(\mathcal{H}_2'\)是有部分重叠的,并且对于\(C\)有软的、光滑的结构:
记在\(\mathcal{H}(C)\)下找到的最优解为\(\mathbf{w}_\text{REG}\)。
在没有正则化时,用梯度下降更新参数的方向是\(-\nabla E_\text{in}(\mathbf{w})\)。而在加入了正则化\(\mathbf{w}^T \mathbf{w}\le C\)的限制时,必须在该限制下更新,如下图:

\(\mathbf{w}^T \mathbf{w}= C\)的法向量(normal vector)就是\(\mathbf{w}\),从图中可知,只要\(-\nabla E_\text{in}(\mathbf{w})\)和\(\mathbf{w}\)不平行,就可继续在该限制下降低\(E_\text{in}(\mathbf{w})\),因此,达到最优解时,一定有
由此,问题可以转化为求解
其中\(\lambda\)是引入的拉格朗日乘子(Lagrange multiplier)。假设已知\(\lambda>0\),只需要把梯度的式子写出来,即有:
直接求解即可得
只要\(\lambda>0\),\(X^T X+\lambda I\)就是正定矩阵,它一定可逆。
在统计学中,这通常叫岭回归(ridge regression)。
换一种视角来看,求解
就等价于求解(相当于对上式两边取积分)
\(\mathbf{w}^T\mathbf{w}\)可叫regularizer,整个\(E_\text{in}(\mathbf{w})+\dfrac{\lambda}{N}\mathbf{w}^T\mathbf{w}\)可叫作augmented error \(E_\text{aug}(\mathbf{w})\)。
这样,原本是给定\(C\)后解一个条件最值问题,现在转化成了一个给定\(\lambda\)的无条件最值问题。
可将\(+\dfrac{\lambda}{N}\mathbf{w}^T\mathbf{w}\)称为weight-decay regulariztion,因为更大的\(\lambda\),就相当于让\(\mathbf{w}\)更短一些,也相当于\(C\)更小一点。
一个小细节:在做特征变换时,如果用\(\Phi(\mathbf{x})=(1,x,x^2,\ldots,x^Q)\),假设\(x_n \in [-1,+1]\),那么\(x^q_n\)会非常小,这一项本来就需要很大的\(w_q\)才能起到作用,如果此时再用正则化,就对高维的系数有些“过度惩罚”了,因为它本来就要比较大才行。因此,可在多项式的空间中找出一些正交的基函数(orthonormal basis function),这是一些比较特别的多项式,叫勒让德多项式(Legendre Polynomials),再用这些多项式这样做特征变换\((1,L_1(x),L_2(x),\ldots,L_Q(x))\)即可。前5个勒让德多项式如下图:

2.2 正则化与VC理论
在最小化augmented error的时候,尽管它与带约束最值问题是等价的,但在计算时,其实并没有真正的将\(\mathbf{w}\)限制在\(\mathcal{H}(C)\)中。那么正则化究竟是怎么发生的?
可以从另一个角度看augmented error:
若记\(\mathbf{w}^T\mathbf{w}\)为\(\Omega(\mathbf{w})\),它度量的是某个假设\(\mathbf{w}\)的复杂度。而在VC Bound中
\(\Omega(\mathcal{H})\)度量的是整个\(\mathcal{H}\)的复杂度。如果\(\dfrac{\lambda}{N}\Omega(\mathbf{w})\)与\(\Omega(\mathcal{H})\)有某种关联,\(E_\text{aug}\)就可以直接作为\(E_\text{out}\)的代理,不需要再通过做好\(E_\text{in}\)来做好\(E_\text{out}\),而同时,又可以享受整个\(\mathcal{H}\)的高度灵活性。
再换个角度,原本对于整个\(\mathcal{H}\)有\(d_\text{VC}(\mathcal{H})=\tilde{d}+1\),而现在相当于只考虑\(\mathcal{H}(C)\)中的假设,也就是说VC维变成了\(d_\text{VC}(\mathcal{H}(C))\)。可以定义一个“有效VC维”\(d_\text{EFF}(\mathcal{H},\mathcal{A})\),只要\(\mathcal{A}\)中做了正则化,有效VC维就会比较小。
2.3 更一般的正则项
有没有更一般的正则项\(\Omega(\mathbf{w})\)?该如何选择呢?有以下建议:
- 与目标有关(target-dependent),如果知道目标函数的一些性质,就可以写出来,比如我们预先知道目标函数是接近于偶函数的,那就可以选取\(\sum \mathbf{1}_{[q \text{ is odd}]} w^2_q\);
- 合理的(plausible),可以选平滑的或简单的,如为了稀疏性而选L1正则项\(\sum\vert w_q \vert\),下文会说明;
- 友好的(friendly),即容易优化,如L2正则项\(\sum w_q^2\);
- 就算选的正则项不好,也没有关系,因为可以靠\(\lambda\)来调节,最差也就是相当于没有加入正则项。
L1正则项如下图:

它是凸的,但不是处处可微,加入它之后,解具有稀疏性。如果在实际中需要有稀疏解,L1就会很有用。
\(\lambda\)要怎么选呢?可根据\(E_\text{out}\)的情况选出的最优\(\lambda\),示例如下(加粗点为最优\(\lambda\)):

从图中可以看到,噪声越大,越需要增加regularization。
但一般情况下,噪声是未知的,该如何选择合适的\(\lambda\)?
3 验证(Validation)
3.1 验证集
\(\lambda\)该如何选择?我们完全不知道\(E_\text{out}\),并且也不能直接通过\(E_\text{in}\)做选择。如果有一个从来没被使用过的测试集就好了,这样就可以根据测试集进行选择:
并且,这样做是有泛化保证的(Hoeffding):
但哪里有真正测试集?只能折中地从\(\mathcal{D}\)划分出一部分数据作为验证集\(\mathcal{D}_\text{val}\subset \mathcal{D}\)了,当然,也要求它是在过去从未被\(\mathcal{A}_m\)使用过的。
划分验证集\(\mathcal{D}_\text{val}\)的过程如下:

用训练集得到的\(g^-_m\),也可以有泛化保证:
做验证时的一般流程如下:

可以看到,在用验证集选出最好的模型\(g^-_{m^*}\)后,还是要用所有的数据再训练一个最好的模型\(g_{m^*}\)出来,一般来说这次训练得到的\(g_m^*\)会由于训练数据量的更大而有更低的\(E_\text{out}\),见下图:

图中最下面的虚线为\(E_\text{out}\)。可以看到,\(K\)不能过大或过小,如果\(K\)过小,虽然\(g_m^-\approx g_m\),但\(E_\text{val}\)和\(E_\text{out}\)会差别很大,而如果\(K\)过大,尽管\(E_\text{val}\approx E_\text{out}\),但会使\(g_m^-\)比\(g_m\)差很多。
我们真正想要做到的是
第一个约等号要求\(K\)较小,第二个约等号要求\(K\)较大,因此必须选一个合适的\(K\),按经验法则可选\(K=\dfrac{N}{5}\)。
3.2 留一交叉验证(LOOCV)
如果让\(K=1\),即只留一个样本\(n\)作为验证集,记
但单个\(e_n\)无法告诉我们准确的信息,要想办法对所有可能的\(E_\text{val}^{(n)}(g_n^-)\)取平均。可以用留一交叉验证(Leave-One-Out Cross Validation):
我们希望的是有\(E_\text{loocv}(\mathcal{H},\mathcal{A})\approx E_\text{out}(g)\)。可作证明:
由于\(E_\text{loovc}(\mathcal{H},\mathcal{A})\)的期望会告诉我们一些关于\(E_\text{out}(g^-)\)的期望的信息,因此也叫作\(E_\text{out}(g)\)的“几乎无偏估计”(almost unbiased estimate)。
用手写数字识别——对数字是否为1进行分类——看看效果,两个基础特征为对称性和平均强度(average intensity),对它们进行特征变换(增加特征数量),再分别用\(E_\text{in}\)和\(E_\text{loocv}\)进行参数选择(参数是变换后的特征个数),结果如下:

如果将\(E_\text{out}\)、\(E_\text{in}\)、\(E_\text{loocv}\)分别随特征数变化而变化的情况画出来,如图:

3.3 \(V\)-折交叉验证
如果有1000个点,做留一交叉验证就要计算1000次\(e_n\),每次计算还要用999个样本做训练,除了少数算法(如线性回归,它有解析解),在大多数情况下会非常耗时间。另一方面,由上一节最后可看到,由于\(E_\text{loocv}\)是在单个点上做平均,结果会有跳动,不够稳定。因此,在实际中,loocv并不是很常用。
在实际中,更常用的是\(V\)折交叉验证(\(V\)-Fold Cross Validation),即将\(\mathcal{D}\)随机分为\(V\)等分,轮流用每一份做验证,用剩下的\(V-1\)份做训练,在实际中一般常取\(V=10\),如下图:

这样能计算出
再用它对参数做选择:
值得注意的是,由于验证过程也是在做选择,它的结果依旧会比最后的测试结果乐观一些。因此,最后重要的是测试的结果,而非找出来的最好的验证的结果。
4 三个学习的原则
这里介绍三个学习的原则。
4.1 奥卡姆剃刀
首先是奥卡姆剃刀(Occam's Razor)。
An explanation of the data should be made as simple as possible, but no simpler.
--Albert Einsterin (?)
这句话传说是爱因斯坦所说,但没有证据。最早可追溯到奥卡姆的话:
entia non sunt multiplicanda praeter necessitatem (entities must not be multiplied beyond necessity)
--William of Occam (1287-1347)
在机器学习中,这是说能拟合数据的最简单的模型往往是最合理的。
什么叫简单的模型呢?对于单个假设\(h\)来说,要求\(\Omega(h)\)较小即参数较少,对于一个模型(假设集)\(\mathcal{H}\)来说,要求\(\Omega(\mathcal{H})\)较小即它没包含太多可能的假设。这两者是相关的,比如\(\vert \mathcal{H} \vert\)规模是\(2^\ell\),那么其实只需要\(\ell\)个参数就可以描述所有的\(h\),因此小的\(\Omega(\mathcal{H})\)也就意味着小的\(\Omega(h)\)。
从哲学意义上说,越简单的模型,“拟合”发生的概率越小,如果真的发生了,那就说明数据中可能真的有一些比较重要的规律。
4.2 抽样偏差
第二个是要注意抽样偏差(Sampling Bias)。
如果数据的抽样过程存在偏差,那么机器学习也会产生一个有偏差的结果。
在讲解VC维时,提到过一个前提条件,就是训练数据和测试数据需要来自同一个分布。当无法满足时,经验法则是,尽可能让测试环境和训练环境尽可能匹配。
4.3 数据窥探
第三是要注意数据窥探(Data Snooping)。
如果你通过观察,发现数据比较符合某个模型,进而选用该模型,这是比较危险的,因为相当于加入了你大脑中的模型的复杂度。
在任何使用数据的过程中,其实都是间接窥探到了数据。在窥探了数据的表现后,做任何决策,都会引入“大脑”复杂度。
比如在做scaling时,不能把训练集和测试集放在一起做scaling,而只能对训练集做。
其实在机器学习的前沿研究中,也存在类似的情况。比如第一篇论文发现了\(\mathcal{H}_1\)会在\(\mathcal{D}\)上表现较好,而第二篇论文提出了\(\mathcal{H}_2\),它在\(\mathcal{D}\)上比\(\mathcal{H}_1\)表现得更好(否则就不会发表),第三篇也如此……如果将所有论文看作一篇最终版的论文,那么真正的VC维其实是\(d_\text{vc}(\cup_m \mathcal{H}_m)\),它会非常大,泛化会非常差。这是因为其实在每一步过程中,作者都通过阅读前人的文献而窥探了数据。
因此在做机器学习时,要审慎地处理数据。要避免用数据来做一些决策,即最好事先就将领域知识加入到模型中,而不是在观察了数据后再把一些特性加入模型中。另外,无论是在实际操作中,还是在看论文过程中,或者是在对待自己的结果时,都要时刻保持怀疑。