空对地(air-to-ground,A2G)通信发展概况与面临挑战
文章目录
-
-
- 1、A2G通信系统发展概况
- 2、A2G通信面临主要挑战
-
1、A2G通信系统发展概况
近年来,空对地(air-to-ground,A2G)通信由于其在高空平台(High Altitude Platform,HAP)和无人驾驶飞行器(Unmanned Aerial Vehicle,UAV)等众多应用中的潜力而受到广泛关注[1]-[2]。具体来说,A2G网络可以作为传感器平台在网络受损等紧急情况下实现远程位置覆盖,或者作为低成本基础设施在拥挤区域如体育场中提供流量卸载。
HAP的实践研究始于20世纪80年代美国的Pathfinder和加拿大的SHARP [1],后者于1987年实现了4.5米翼展无人飞机平流层飞行。20世纪90年代末,来自世界不同地区的一系列大型项目进一步解决了与平流层通信有关的关键问题,包括高效无线通信系统设计、无线电传播其对地面与卫星通信系统潜在干扰研究,以及模块化通信装备开发等。通常来说,HAP工作在17~25km高度,其优点是覆盖范围广,时间持久,可以用于为较大地理区域提供长期可靠的无线覆盖[1]。
由于具有高机动性和低成本,无人驾驶空中飞行器(unmanned aerial vehicle,UAV),也通常称为无人驾驶飞机或远程驾驶飞机,在过去几十年取得了广泛的应用[2]。历史上,无人机主要用于军事部署在敌对地区减少飞行员损失。而随着成本不断降低和设备小型化,小型无人机(通常重量不超过25公斤)在民用和商业领域出现了很多新的应用,典型例子包括气象监测、森林火灾探测、交通控制、货物运输、紧急搜索和救援、通信中继等等[2]。与HAP相比,低空UAV有其重要优势:一方面,UAV价格低廉且容易布置,因而更适用于突发且有限时间的任务;其次,多数情况下可以建立视距(Line of sight, LoS)通信链路从而获得可靠的通信性能。第三, UAV的机动性可以通过动态调整状态来提升性能,例如自适应通信可以与UAV的移动性控制结合等。
低空UAV的三种典型应用如图1所示[2],其中(a)为UAV辅助全方位覆盖, UAV用以协助现有通信基础设施在服务区域内提供无缝的无线覆盖,两个示例场景分别是自然灾害造成部分或全部基础设施损坏后的快速服务恢复,以及在非常拥挤的地区(如体育赛事期间的体育场)的基站卸载,后者已归为第五代(5G)系统需有效处理的五个关键场景之一;(b)为UAV辅助中继,当没有可靠的直接链路时,UAV为两个或者更多的远距离用户(组)提供无线连接;©是UAV辅助信息传播与数据采集,利用UAV向大量分布式的无线设备传播(收集)延迟容忍信息,如精准农业中的无线传感器应用。
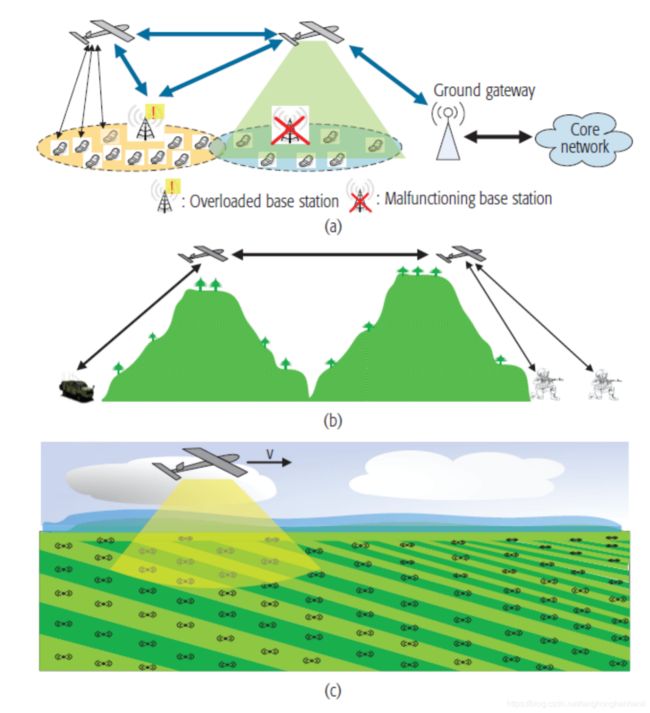
图1 UAV辅助无线通信典型应用案例:
a)UAV辅助全方位覆盖;(b)UAV辅助中继;c)UAV辅助信息传播和数据收集
随着高速铁路的飞速发展,如何满足高速列车(high speed train, HST)对高数据率服务的需求成为近年来研究的热点。现有服务通常是通过地面蜂窝系统、卫星通信系统等实现。然而,蜂窝系统应用于HST通信时面临一些严重的问题,如高速移动带来的频繁切换、快速衰落等。此外,由于高速铁路的运行空间大,需要部署大量基站来构建性能良好的网络,因而需要大量的前期投资和维护成本[3]。但HST仅在一个或两个BSS内移动,因此BSS并非一直工作,造成资源浪费。尤其在人烟稀少的高海拔地区,系统的建设与维护将面临巨大困难。与地面通信系统相比,卫星能够为列车运行区域提供足够的覆盖范围,因此无需在轨道旁安装大量的地面通信设备,此外受到HST高速移动带来的多普勒效应与快速切换等的影响也更小。但卫星通信链路带宽有限,成本高,不能提供大规模的高质量服务(QoS)通信。并且卫星通信存在较大的连接延迟,在实时应用中受限。
因此,近年来,随着A2G系统的发展,A2G在HST通信中的应用成为研究的热点问题。在欧洲,Capanina被用于向高速运动的公共交通车辆(如高达300 km/h的火车)提供有效无线覆盖,其目标是在60公里覆盖范围内,向用户提供高达120 MB/s的数据速率[4]。White等人采用Ka波段频率为28/31GHz的高空平台(HAP),利用“智能”天线阵列向多辆移动铁路列车提供同步高数据率通信链路[5]。[3]提出一种UAS-R(铁路无人驾驶飞机)系统,即将无人机用作通信热点或者与移动的HST一起作为中继,从而形成空中移动蜂窝。[6]提出了一种包括视距状态、阴影状态和阻塞状态的三状态半马尔可夫信道模型建立基于HAP的高速列车信道环境。[7]研究了一种基于多HAPS的虚拟MIMO(V-MIMO)技术,在视距(LOS)传播条件下为高速列车提供宽带无线接入。[4]则指出由于频段不合适、缺乏对高速移动性的支持、数据速率不足、视距(LOS)传输、单向或不对称传输等原因,已有宽带标准不适用于从HAPS向高速移动用户提供宽带服务。
综上所述,将A2G通信应用于高速铁路通信等重要场景,特别是高海拔无人地带,将有效降低建设与维护成本。但与此同时,也面临重大挑战,因此针对A2G的基础理论与关键技术展开研究,具有非常重要的意义和价值。
2、A2G通信面临主要挑战
与传统陆地通信不同,A2G通信系统,特别是UAV通信系统,主要面临如下挑战:
- 能耗限制。UAV系统的性能和运行持续时间根本上受限于有限的机载能量。尽管过去几十年里电力装置和能量存储技术取得了巨大的进步,有限的能源供应仍然严重地阻碍了UAV的耐用性。因此,有效的能量感知部署与高能效的传输机制是UAV通信面临挑战之一。
- 高速业务需求。UVA通常配备有向地面站传送高分辨率图像和视频的摄像机,因此往往需要高速率传输。然而,尽管多输入多输出(multiple-in-multiple-out,MIMO)技术能够有效提高频谱利用率,其在A2G系统中的应用仍然受到诸多因素制约。一方面A2G传输缺乏丰富散射限制了MIMO的空间复用增益,此外UAV有限的尺寸、重量和功率(size, weight and power, SWAP)导致信号处理复杂度受限,而MIMO系统所依赖的准确的信道状态信息(CSI)在UAV这样高动态环境中也很难获得。
- 干扰管理。由于UAV具有移动性且缺乏固定的回传链路和集中控制,UAV基站的邻近区干扰协调比地面蜂窝系统更具挑战性。因此,需要专门设计用于UAV系统的有效干扰管理技术。
【参考文献】
[1]L.Reynaud and T.Rasheed, “Deployable aerial communication networks: challenges for futuristic applications,” 9th ACM symposium on Performance evaluation of wireless ad hoc, sensor, and ubiquitous networks, At Paphos, Cyprus, Oct. 2012. DOI:10.1145/2387027.2387030.
[2]Y.Zeng, R.Zhang and T.J.Lim, “Wireless communications with unmanned aerial vehicles: opportunities and challenges,” IEEE Comm.Mag., pp.36-42, vol.54, Issue.5, 2016.
[3]Y.Hou, “Future Communication Model for High-speed Railway Based on Unmanned Aerial Vehicles,” arXiv preprint arXiv:1411.3450,2014.
[4]E. Falletti ; M. Laddomada ; M. Mondin ; F. Sellone, Integrated services from high-altitude platforms: a flexible communication system, IEEE Commun.Mag., vol.44, issue.2, 2006.
[5]G. P. White and Y. V. Zakharov, “Data communications to trains from high-altitude platforms”, IEEE Trans. on Vehicular Technology, vol.56, no. 4, July 2007.
[6]M.Li, MC.Yang, G.Lv and Q.Guo, Three-state semi-Markov channel model for HAP-high speed train communication link, in Proc.CHINACOM’2011, pp.279 - 283 [7]T.Celcer ; T. Javornik ; M. Mohorcic ; G. Kandus, Virtual multiple input multiple output in multiple high-altitude platform constellations, IET Communications, vol.3, issue.11, pp.1704-1715, 2009.