Palabos源码学习 | 浸入边界法 | 论文公式对应源码讲解
Conbined multi-direct forcing method and IBM算法概览
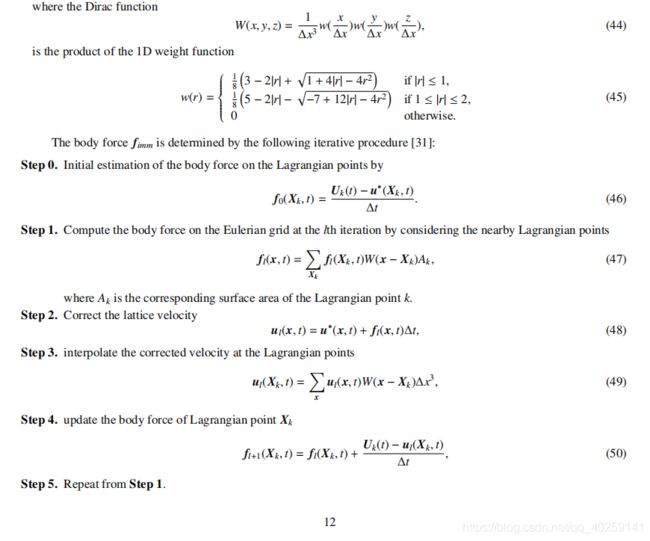
截图源自论文:Bridging the computational gap between mesoscopic and continuum modeling of
red blood cells for fully resolved blood flow
其算法是IBM的一个版本,Multi-direct forcing method的IBM,论文标题:Combined multi-direct forcing and immersed boundary method for simulating flows with moving particles
前言
在前面一篇文章中我已经说明了一些关于IBM在程序中的调用和用法,本篇主要是单独讲一下论文上公式对应代码的部分,故独立出来。但不再重复代码结构功能的解释,比较初学的同学可以去先看前面那篇文章。
主要目标是梳理算法思路,找到对应的代码公式关系,方便优化算法的同学在Palabos基础上修改程序。
Palabos源码
位置:src\offLattice\immersedWalls3D.h和.hh。
以InamuroIteration3D为例。
> /* ******** InamuroIteration3D ************************************ */
>
> template<typename T, class VelFunction>
> InamuroIteration3D<T,VelFunction>::InamuroIteration3D(VelFunction
> velFunction_, T tau_, bool incompressibleModel_)
> : velFunction(velFunction_),
> tau(tau_),
> incompressibleModel(incompressibleModel_) {
}
>
> template<typename T, class VelFunction> void
> InamuroIteration3D<T,VelFunction>::processGenericBlocks (
> Box3D domain, std::vector<AtomicBlock3D*> blocks ) {
> PLB_PRECONDITION( blocks.size()==3 );
> ScalarField3D<T>* rhoBar = dynamic_cast<ScalarField3D<T>*>(blocks[0]);
> TensorField3D<T,3>* j = dynamic_cast<TensorField3D<T,3>*>(blocks[1]);
> AtomicContainerBlock3D* container = dynamic_cast<AtomicContainerBlock3D*>(blocks[2]);
> PLB_ASSERT( rhoBar );
> PLB_ASSERT( j );
> PLB_ASSERT( container );
> Dot3D location = rhoBar->getLocation();
> Dot3D ofsJ = computeRelativeDisplacement(*rhoBar, *j);
> ImmersedWallData3D<T>* wallData =
> dynamic_cast<ImmersedWallData3D<T>*>( container->getData() );
> PLB_ASSERT(wallData);
>
> std::vector< Array<T,3> > const& vertices = wallData->vertices;
> std::vector<T> const& areas = wallData->areas;
> PLB_ASSERT( vertices.size()==areas.size() );
> std::vector<Array<T,3> > deltaG(vertices.size());
> std::vector<Array<T,3> >& g = wallData->g;
> PLB_ASSERT( vertices.size()==g.size() );
>
> // In this iteration, the force is computed for every vertex.
> if (incompressibleModel) {
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));
> Array<T,3> averageJ; averageJ.resetToZero();
> // Use the weighting function to compute the average momentum
> // and the average density on the surface vertex.
> // x x . x x
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));
> Array<T,3> nextJ = j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z);
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);
> T W = inamuroDeltaFunction<T>().W(r);
> averageJ += W*nextJ;//此处为论文的Step3,Lagrangian点通过Dirac函数插值得到速度
> }
> }
> }
> //averageJ += (T)0.5*g[i];
> Array<T,3> wallVelocity = velFunction(vertex);
> deltaG[i] = areas[i]*(wallVelocity-averageJ);
> g[i] += deltaG[i];//此处为论文的Step4,Lagrangian点Xk的体积力计算
> }
> } else {
// Compressible model.
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));
> Array<T,3> averageJ; averageJ.resetToZero();
> T averageRhoBar = T();
> // Use the weighting function to compute the average momentum
> // and the average density on the surface vertex.
> // x x . x x
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));
> T nextRhoBar = rhoBar->get(pos[0], pos[1], pos[2]);
> Array<T,3> nextJ = j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z);
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);
> T W = inamuroDeltaFunction<T>().W(r);
> averageJ += W*nextJ;
> averageRhoBar += W*nextRhoBar;
> }
> }
> }
> //averageJ += (T)0.5*g[i];
> Array<T,3> wallVelocity = velFunction(vertex);
> deltaG[i] = areas[i]*((averageRhoBar+(T)1.)*wallVelocity-averageJ);
> //g[i] += deltaG[i];
> g[i] += deltaG[i]/((T)1.0+averageRhoBar);
> }
> }
> //上面的是压缩模型的部分,这里不作解释。
> //下面的循环即表示force spreading的部分。
> // In this iteration, the force is applied from every vertex to the grid nodes.
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));
> Array<T,3> nextJ = j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z);
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);
> T W = inamuroDeltaFunction<T>().W(r);
> nextJ += tau*W*deltaG[i]; //Corrected velocity//此处代表论文的Algorithm2.3//step1
> j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z) = nextJ;//此处为论文的Step2,为correct the lattice velocity
> }
> }
> }
> } }
代码中pos[] 是Eulerian点的坐标,但加上ofsJ.xyz便代表速度velocity。
这个方法是Palabos中通过computeRelativeDisplacement实现的,这个功能在User guide和算例boussinesqThermal中都有介绍,此处不过多介绍。