PDPS软件:导出AutoCAD可编辑的2D布局图
目录
概述
创建新仿真资源
JT格式2D布局图生成
导出2D布局图JT格式文件
JT格式文件转换为CAD格式文件
已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
概述
在工业机器人生产线或工作站系统集成过程中,最重要的一个点就是2D布局图的生成,这个步骤通常在虚拟仿真工作完成后由仿真人员直接导出具备参考意义的2D投影图后,再由机械设计人员在AutoCAD软件或其他机械设计软件中最终设计出图。
作为市场上最常使用的机器人虚拟仿真软件,PDPS也能够将3D模型投影到2D平面,并导出2D布局图,只是它导出的2D布局图都是JT格式文件,大部分的2D图机械设计软件都不能直接对其进行二次编辑。
要想对PDPS软件导出的2D布局图进行二次编辑,还需要使用专业的软件对其进行数据格式转换,这样转换后的2D布局图就可以用AutoCAD软件打开查看,并支持对其进行二次编辑。
创建新仿真资源
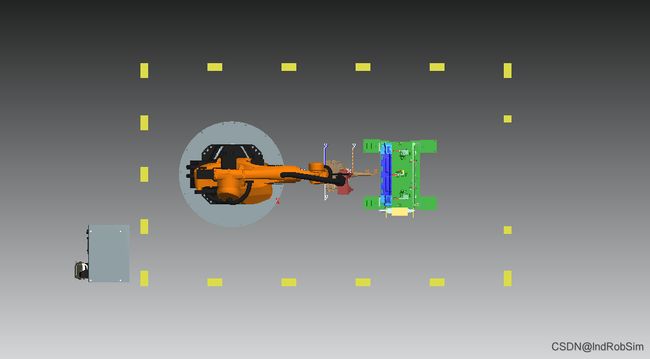
在Process Simulate软件中打开机器人虚拟仿真项目,使用快捷工具条中的视图操作命令按钮将软件工作区中的仿真模型调整到要输出的2D视图状态,一般为俯视图。
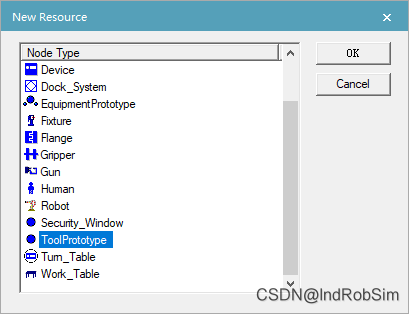
左侧的对象浏览树Object Tree中点选仿真资源文件夹Resources,然后在“Modeling”菜单栏下“Components”命令组中点击“Create New Resource”![]() 命令按钮,在弹出的New Resource对话框中选择任意一种模型类型(如ToolPrototype),点击OK按钮。
命令按钮,在弹出的New Resource对话框中选择任意一种模型类型(如ToolPrototype),点击OK按钮。
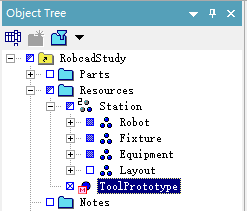
此时,在仿真资源文件夹Resources下创建了一个ToolPrototype类型的同名仿真资源节点,并且保持可编辑状态,即保持“Set Modeling Scope”激活状态。
JT格式2D布局图生成
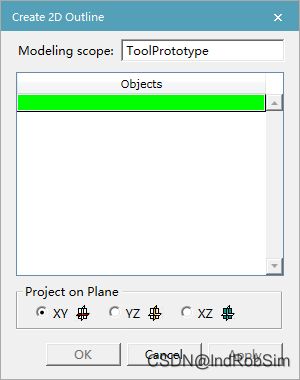
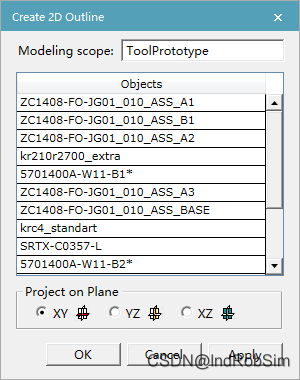
点选新创建的仿真资源节点ToolPrototype,然后在“Geometry”命令组中点击“Create 2D Outline”![]() 命令按钮,弹出Create 2D Outline对话框。对话框中Modeling scope选项后的显示框内显示出当前已选择的用于存放2D布局图的仿真资源节点名称。
命令按钮,弹出Create 2D Outline对话框。对话框中Modeling scope选项后的显示框内显示出当前已选择的用于存放2D布局图的仿真资源节点名称。
值得注意的是,要想使用Create 2D Outline命令,那么仿真资源中至少要有一个仿真资源节点处于可编辑状态,也就是Set Modeling Scope状态,否则Create 2D Outline命令将不能被激活使用。
在软件工作区中框选机器人工作站中包含的所有3D模型,这时软件工作区出现3D模型向2D平面投影的参考平面,此参考平面内包含的所有设备都将被投影到以此平面为参考的平面上。
同时,在Create 2D Outline对话框的Objects列表栏中出现所有已被选中的3D模型设备名称,这些3D设备模型都将被投影到2D视图并进行导出。
在Create 2D Outline对话框的Project on Plane功能选项下可以切换参考平面,一般情况下机器人工作站或生产线布局图的投影参考平面都选择“XY”平面,即俯视图平面。
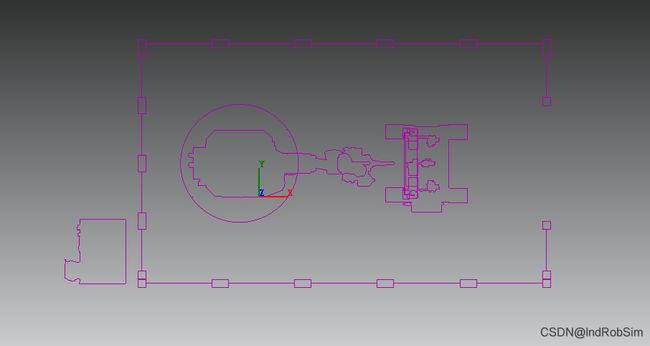
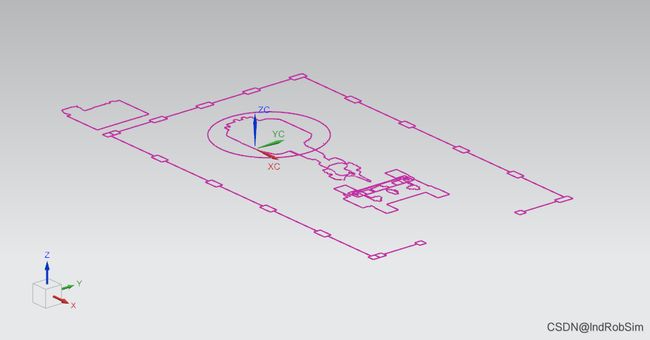
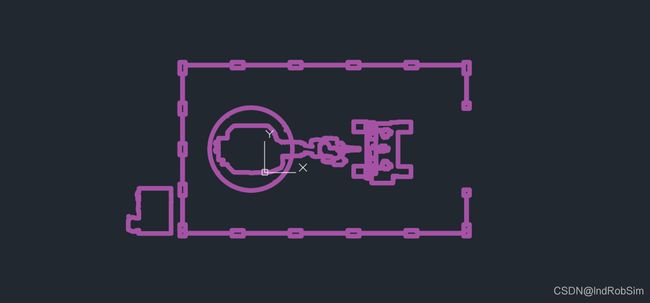
点击“Apply”按钮创建2D布局图,并使Create 2D Outline对话框保持打开状态以创建其他2D布局图,或者点击“OK”按钮以创建2D布局图并关闭对话框。布局图生成完成后隐藏机器人工作站中所有3D模型,可以看到生成的2D投影布局图,如下所示。
导出2D布局图JT格式文件
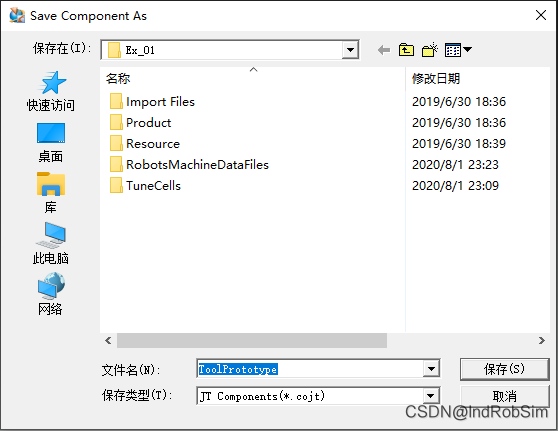
左侧的对象浏览树Object Tree中点选生成的布局图仿真资源节点ToolPrototype,然后在“Scope”命令组中点击“End Modeling”命令按钮,在弹出的Save Component As对话框中选择要保存布局图的文件目录,通常为仿真文件资源目录,点击“保存”按钮,2D布局图被导出。
Process Simulate软件直接导出的2D布局图是包含有JT格式模型文件的COJT格式文件,可以使用JT2Go软件打开其中的JT格式布局图文件,对其进行查看。要想使用AutoCAD软件编辑导出的2D布局图,还需要使用NX UG软件进行数据格式转换。
JT格式文件转换为CAD格式文件
使用NX UG软件打开从Process Simulate软件中导出的JT格式2D布局图模型文件。
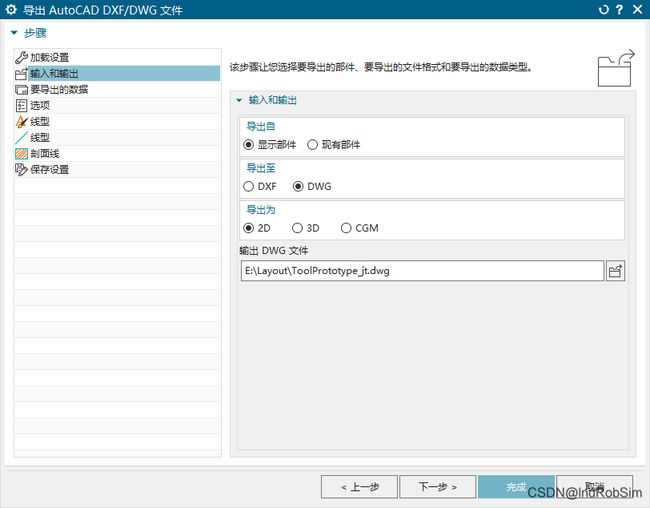
“文件”下拉菜单中依次点击“导出”→“AutoCAD DXF/DWG…”,打开导出AutoCAD DXF/DWG文件对话框。
对话框打开后默认展示“输入和输出”步骤,右侧的输入和输出属性中,导出至下可以设置要导出的文件格式(DXF或DWG),“导出为”下设置导出文件为“2D”形式视图,输出文件下可以设置导出文件保存目录。
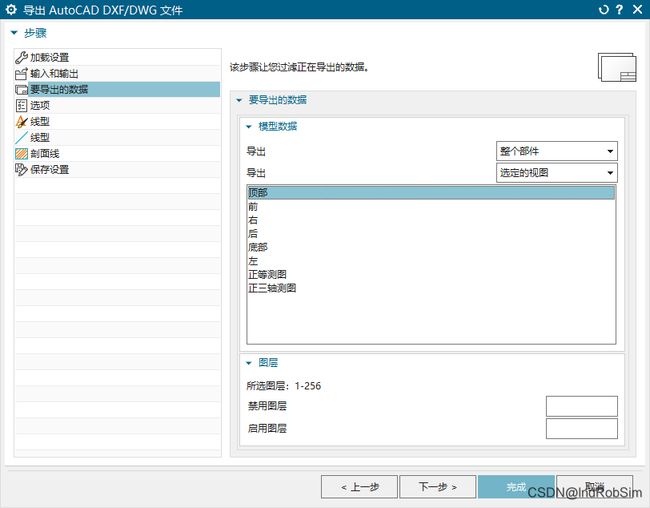
点击左侧的“要导出的数据”步骤,右侧的模型数据下导出功能选项后选择“选定的视图”,然后在下方的视图列表中选择“顶部”,即导出俯视图。
其他属性参数全部保持默认,点击“完成”按钮,在两次弹出的信息提示框中依次点击“继续”、“是”,等待格式转换完成。导出成功后即可在设定的文件目录中找到CAD格式文件,然后使用AutoCAD软件将其打开,就能够对布局图进行查看与编辑。
The End
上一篇:PDPS软件虚拟仿真:Lock TCPF功能介绍与使用方法