A 算法 Python实现
A* 算法 Python实现
最近考试周,没时间封装的很好
代码分两部分,定义和调用部分
定义部分
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import heapq
class AstarPoint(object):
'''
Astar点类
========== 输入 ==========
self_x,self_y : int, 点的坐标
g: float, 点的g值
f_value: float, 点的f值
ParentPosition: tuple,父节点的坐标
'''
def __init__(self,self_x,self_y,g,f_value,ParentPosition=None):
'''
'''
self.SelfPosition=(self_x,self_y)
self.ParentPosition=ParentPosition
self.f_value=f_value
self.g=g
def __hash__(self):
return self.SelfPosition
def __eq__(self,other):
return self.SelfPosition==other.SelfPosition
def __repr__(self):
if self.ParentPosition!=None:
return "AstarPoint(%d, %d, %d, %d"%(self.SelfPosition[0],self.SelfPosition[1],self.g,self.f_value)+\
", " +str(self.ParentPosition[0])+', '+str(self.ParentPosition[1])+")"
else:
return "AstarPoint(%d, %d, %d, %d"%(self.SelfPosition[0],self.SelfPosition[1],self.g,self.f_value)+\
", " +str(None)+', '+str(None)+")"
def __str__(self):
if self.ParentPosition==None:
return "AstartPoint类 | 坐标为: " + str(self.SelfPosition) + "\t\t f_value : "+str(self.f_value) + \
"\n\t | 当前节点无父节点"
else:
return "AstartPoint类 | 坐标为: " + str(self.SelfPosition)+"\t\t f_value : " + str(self.f_value) + \
"\n\t | 父节点坐标为: " + str(self.ParentPosition)
class CostMap(object):
'''地图类'''
def __init__(self,init_map):
'''
========== 输入 ==========
init_map : np.ndarray, 初始化的CostMap,通常为np.zeros,可为二维,三维或者更高位
'''
self.map=init_map
def obstacle_setter(self,start_x,end_x,start_y,end_y,is_clean=False):
'''
obstacle_adder用于添加障碍物
========== 输入 ==========
start_x, start_y : 起点的坐标
end_x, end_y :终点的坐标
is_clean : Ture表示清除所有障碍物
'''
if not is_clean:
self.map[start_x:end_x,start_y:end_y]=np.inf
else:
self.map[:,:]=0
# 可视化函数
def ShowMap(CostMap,StartPoint=None,EndPoint=None,pandas=True,Path=None):
'''
ShowMap用于以表格形式或者以栅格图形式展示地图
=========== 输入 ==========
CostMap : np.ndarray
StartPoint, EndPoint : tuple, 默认为None
Path : list
=========== 输出 ==========
return None
'''
if pandas:
pd.options.display.max_columns = None
pd.options.display.max_rows = None
shape=CostMap.shape
CostMap=CostMap.T[::-1,:]
return pd.DataFrame(CostMap,index=np.arange(shape[1]-1,-1,-1),columns=np.arange(0,shape[0],1))
else:
ColorPlan=list("rgbcwk")
squareSpace=0.33333
squareAera=3000
#创建地图
Figure,Axes=plt.subplots(1)
Figure.set_size_inches(CostMap.shape)
#绘制图形
Obstacle=np.where(CostMap == np.inf)
Suspects=np.where((CostMap > 0) & (CostMap < np.inf))
#添加障碍物,起点,终点和路径
for (x,y) in zip(Obstacle[0],Obstacle[1]):
Axes.scatter(x+0.5,y+0.5,marker='s',c=ColorPlan[-1],s=squareAera)
for (x,y) in zip(Suspects[0],Suspects[1]):
Axes.scatter(x+0.5,y+0.5,marker='s',c=ColorPlan[2],s=squareAera)
style=dict(size=13,color='black')
Axes.text(x,y,str(CostMap[x,y]),**style)
if Path != None:
for (x,y) in Path:
Axes.scatter(x+0.5,y+0.5,marker='s',c=ColorPlan[3],s=squareAera)
Axes.scatter([],[],marker='s',c=ColorPlan[3],label='Path Point')
if StartPoint != None:
Axes.scatter(StartPoint[0]+0.5,StartPoint[1]+0.5,marker='s',c=ColorPlan[1],s=squareAera)
Axes.scatter([],[],marker='s',c=ColorPlan[0],label='Start Point')
if EndPoint != None:
Axes.scatter(EndPoint[0]+0.5,EndPoint[1]+0.5,marker='s',c=ColorPlan[0],s=squareAera)
Axes.scatter([],[],marker='s',c=ColorPlan[1],label='End Point')
#设置图例
Axes.scatter([],[],marker='s',c=ColorPlan[-1],label='Obstacle')
Axes.scatter([],[],marker='s',c=ColorPlan[2],label='Suspect Point')
#图案设置
Axes.set_xlim(0,CostMap.shape[0],1)
Axes.set_ylim(0,CostMap.shape[1],1)
Axes.set_xticks(np.arange(0,CostMap.shape[0]+1,1))
Axes.set_yticks(np.arange(0,CostMap.shape[1]+1,1))
Axes.grid(True)
Axes.legend(bbox_to_anchor=(1.005, 1), loc='upper left', borderaxespad=0.,fontsize='xx-large')
plt.show()
# 获得最小f值的函数
def GetMinimunFValueIndex(OpenList):
FValueList=[]
FValueHeap=[]
for point in OpenList:
heapq.heappush(FValueHeap,point.f_value)
FValueList.append(point.f_value)
return FValueList.index(heapq.nsmallest(1,FValueHeap)[0])
def A_star_path_planning(cost_map,start_point,goal_point):
"""
A star 路径规划
========== 输入 ==========
cost_map : CostMap的一个实例
start_point : tuple,表示起点坐标,例如 (1, 1) 或者 (1, 1, 1)
goal_point : tuple,表示终点坐标,例如 (19, 19) 或者 (19, 19, 19)
========== 输出 ==========
path : 点list,例如 [(1, 1, 1), (2, 2, 2), ..., (19, 19, 19)]
"""
OpenList=[
AstarPoint(start_point[0],start_point[1],0,np.sqrt(np.sum((start_point[0]-goal_point[0])**2+(start_point[1]-goal_point[1])**2)))
]
CloseList=[]
Path=[]
isDone=False
k=1
while (len(OpenList)>0) and (not isDone) :
# 获得最小f值的点
index=GetMinimunFValueIndex(OpenList) # 获得f值最小的点的索引
# OpenList中弹出f值最小的点,加入CloseList中
tempPoint=OpenList.pop(index)
CloseList.append(tempPoint)
# 将周围的点加入OpenList中
for i in [-1,0,1]:
for j in [-1,0,1]:
x_next=tempPoint.SelfPosition[0]+i
y_next=tempPoint.SelfPosition[1]+j
# 首先排除一些不可能的情况
if i==0 and j==0: # 1. 点是本身
continue
if(x_next<0 or x_next>=cost_map.shape[0] or y_next<0 or y_next>=cost_map.shape[1]): # 2. 点在地图外
continue
if cost_map[x_next,y_next] == np.inf: # 3. 点是障碍物
continue
if (AstarPoint(x_next,y_next,0,0) in CloseList): # 4. 点已经在OpenList或者在CloseList中
continue
if (AstarPoint(x_next,y_next,0,0) not in OpenList):
g_next=tempPoint.g+1
f_value_next=g_next + np.sqrt(np.sum((x_next-goal_point[0])**2+(y_next-goal_point[1])**2))
parent_x=x_next-i
parent_y=y_next-j
OpenList.append(
AstarPoint(x_next, y_next, g_next, f_value_next, ParentPosition=(parent_x,parent_y))
)
AstarMap.map[x_next,y_next]=g_next
k+=1
else:
# 如果当前点已经在OpenList中,且G更小,更新父节点
if (tempPoint.g > OpenList[OpenList.index(AstarPoint(x_next,y_next,0,0))].g):
parent_x=x_next
parent_y=x_next
# 如果终点已经在CloseList中
if AstarPoint(goal_point[0],goal_point[1],0,0) in CloseList:
isDone=True
#回溯路径
son_index=CloseList.index(AstarPoint(goal_point[0],goal_point[1],0,0))
while start_point not in Path:
try:
Path.append(CloseList[son_index].SelfPosition)
parent_x,parent_y=CloseList[son_index].ParentPosition
son_index=CloseList.index(AstarPoint(parent_x,parent_y,0,0))
except TypeError:
print("已回溯到起点")
return Path
调用部分
# 初始化地图和起点终点
shape=tuple([int(x) for x in input("请输入地图大小(x_length,y_length): ").split(',')])
startPoint=tuple([int(x) for x in input('请输入起点坐标(x,y): ').split(',') if (int(x) <shape[0] and int(x)<shape[1])])
endPoint=tuple([int(x) for x in input('请输入终点坐标(x,y): ').split(',') if (int(x) <shape[0] and int(x)<shape[1])])
AstarMap=CostMap(np.zeros(shape))
# 添加障碍物
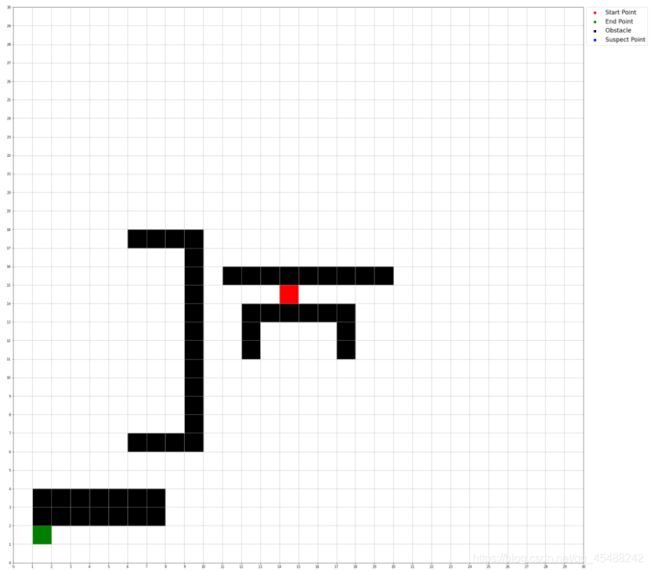
AstarMap.obstacle_setter(None,None,None,None,is_clean=True)
AstarMap.obstacle_setter(1,8,2,4)
AstarMap.obstacle_setter(6,10,6,7)
AstarMap.obstacle_setter(9,10,6,18)
AstarMap.obstacle_setter(6,10,17,18)
AstarMap.obstacle_setter(12,13,11,14)
AstarMap.obstacle_setter(12,18,13,14)
AstarMap.obstacle_setter(17,18,11,14)
AstarMap.obstacle_setter(11,20,15,16)
ShowMap(AstarMap.map,StartPoint=startPoint,EndPoint=endPoint,pandas=False)
# 路径规划
Path=A_star_path_planning(AstarMap.map,startPoint,endPoint)
# 可视化
ShowMap(AstarMap.map,StartPoint=startPoint,EndPoint=endPoint,pandas=False,Path=Path)
运行结果
![]()