基于单片机定时器/计数器的时钟设计及计数设计
基于单片机定时器/计数器的时钟设计以及计数设计
- 第一部分 前言
- 第二部分 定时器/计数器的原理
-
- MCS-51定时器/计数器的结构
- 定时器/计数器相关特殊功能寄存器
- 定时器/计数器工作方式
- 第三部分 定时器/计数器编程方法
- 第四部分 定时器/计数器仿真设计
-
- 设计案例一
-
- 原理图
- 动态仿真结果
- 代码
- 设计案例二
-
- 原理图
- 动态仿真结果
- 代码
第一部分 前言
本次单片机基础实验将会通过在Proteus软件中画原理图,然后Keil软件下编写源程序并编译形成可执行文件.hex,下载源程序,进行Protues和Keil的联合仿真运行,最终对单片机仿真有初步的认识。 通过本篇文章定时器/计数器T0、T1的工作方式选择和编程方法。学习Proteus了解定时器/计数器中断服务程序的设计方法以下是本篇文章正文内容,所设计的案例可供参考
第二部分 定时器/计数器的原理
MCS-51定时器/计数器的结构
MCS-51单片机根据不同型号,其片内定时器/计数器数目不同。8051单片机有两个16位定时器/计数器寄存器:Timer0(T0定时器)与Timer1(T1定时器1)。8052除这两个定时器/计数器外还增加了1个Timer2(T2定时器),而这3个都可设置为定时器或事件计数器。当其作为“定时器”功能时,它是对标准时钟计数,每个时钟周期寄存器自动增1。由于MCS-51单片机的一个机器周期由12个振荡器周期组成,计数速率是振荡器频率的1/12。作为“计数器”功能,寄存器在响应相应的外部输入引脚T0、T1或T2(在8052中)由1至0的转变而增1。不论是“定时器”还是外部事件“计数器”,其工作原理是一样的,即定时器/计数器电路中的内部计数器从某一预定值(此值是可编程的)开始计数,当累计到最大值时产生溢出,并同时会建立一个相应的溢出标志(即中断标志位)。除了“定时器”或“计数器”选择外,定时器0与定时器1有4种工作方式需要选择。在8052单片机中的定时器T2有3种操作方式:“捕获”、“自动重装入”与“波特率生成器”。下面主要以AT89C51单片机为例讲解定时器/计数器的基本结构。
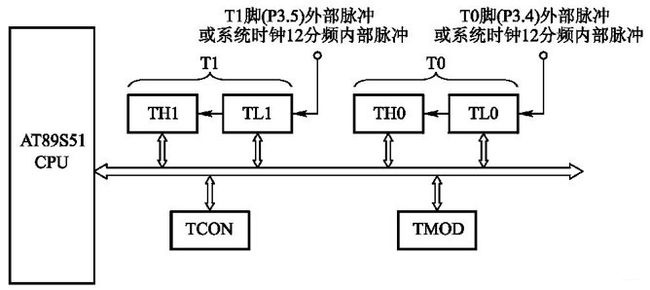
AT89C51单片机片内定时器/计数器的结构如图1所示。定时器内部实质上是16位加法计数器,其控制电路受软件控制。当用作定时器时,对机器周期计数,每过一个机器周期,计数器加1。由于每个机器周期包含12个振荡信号周期,所以加1计数器的计数频率为振荡器信号频率的1/12。当用作计数器功能时,加1计数器的计数脉冲取自外部输入端T0(P3.4)和T1(P3.5),只要这些引脚上有从“1”到“0”的负跳变,计数器就加1。CPU在每个机器周期的S5P2时刻对外部输入状态进行采样,计数器加1的执行是在检测到跳变后的下一个机器周期的S3P1时刻。由于需要两个机器周期来识别一个从“1”到“0”的负跳变,所以最大计数频率为振荡信号频率的1/24。而外部时钟脉冲持续为0和为1的时间不能少于一个机器周期。
两个可编程的16位定时器 /计数器T0 和 T1
- T0 = TH0(高8位) + TL0(低8位)
- T1 = TH1(高8位) + TL1(低8位)
定时器/计数器相关特殊功能寄存器
- TMOD:控制定时器/计数器的工作方式
- TCON:控制定时器/计数器的运行
- IE、IP:定时器/计数器的中断控制
1. TMOD
TMOD用来选择定时器/计数器的工作模式和工作方式,它的字节地址是89H,但该寄存器不能进行位寻址。
- GATE=0,运行控制位 TR0/TR1(=1) 控制 T0/T1 启动;
- GATE=1,INT0/1 (=1) 及运行控制位TR0/TR1(=1)控制T0/T1启动,可用于外部脉冲宽度测量
- C/T=0,用作定时器(定时功能通过计数实现,计数脉冲来自内部系统时钟输入,一个机器周期产生一个计数脉冲);
- C/T=1,用作计数器(对外部脉冲计数,外部输入脉冲发送负跳
变时加1)
T0模式
| M1 | M0 | 功能 |
|---|---|---|
| 0 | 0 | 13 位定时器/ 计数器,TL1 低5 位 + TH1全8 位,最大值为8192 |
| 0 | 1 | 16 位定时器/ 计数器,TL1、TH1 全用,最大值65.536ms; |
| 1 | 0 | 8 位自动重装载定时器,当溢出时将TH1 存放的值自动重装入TL1,最大值为256; |
| 1 | 1 | 定时器/ 计数器1 此时无效(停止计数) |
T1模式
| M1 | M0 | 功能 |
|---|---|---|
| 0 | 0 | 13 位定时器/ 计数器,TL1 低5 位 + TH1全8 位,最大值为8192 |
| 0 | 1 | 16 位定时器/ 计数器,TL1、TH1 全用,最大值65.536ms; |
| 1 | 0 | 8 位自动重装载定时器,当溢出时将TH1 存放的值自动重装入TL1,最大值为256; |
| 1 | 1 | 定时器0 为双8 位定时器/ 计数器,TL0 作为一个8 位定时器/ 计数器,通过标准定时器0 的控制位控制,TH0 仅作为一个8 位定时器,由定时器1 的控制位控制。 |
2.TCON
TCON寄存器的字节地址为88H,可进行位寻址。高4位分别为定时器/计数器的启动控制和溢出中断标志,低4位与外部中断控制有关,

各标志位的功能:
1. IT0—选择外部中断请求0为跳沿触发方式还是电平触发方式:
IT0=0,为电平触发方式。
IT0=1,为跳沿触发方式。
可由软件置“1”或清“0”。
2. IE0—外部中断请求0的中断请求标志位。
IE0=0,无中断请求。
IE0=1,外部中断0有中断请求。
当CPU响应该中断,转向中断服务程序时,由硬件清“0”IE0
**3. IT1—外部中断请求1为跳沿触发方式还是电平触发方式,意义与IT0类似。
- IE1—外部中断请求1的中断请求标志位,意义与IE0类似。
- TF0 —T0溢出中断请求标志位。**
T0计数后,当最高位产生溢出时,由硬件置“1”TF0,向CPU申请中断,CPU响应TF0中断时,清“0”TF0,TF0也可由软件清0。
6. TF1—T1的溢出中断请求标志位,功能和TF0类似。
TR1、TR0 2个位与中断无关,仅与定时器/计数器T1和T0有关。
3.IE
中断允许寄存器:CPU对中断源的开放或屏蔽,由片内的中断允许寄存器IE控制。字节地址为A8H,可位寻址。格式如下:

IE中各位的功能如下:
1. EA:中断允许总控制位
EA=0:CPU屏蔽所有的中断请求(CPU关中断) ;
EA=1:CPU开放所有中断(CPU开中断) 。
五个中断源的中断请求是否允许,还要由IE中对应的5个中断请求允许控制位的状态来决定。
2. ES:串行口中断允许位
ES=0:禁止串行口中断;
ES=1:允许串行口中断。
3. ET1:定时器/计数器T1的溢出中断允许位
ET1=0:禁止T1溢出中断;
ET1=1:允许T1溢出中断。
4. EX1:外部中断1中断允许位
EX1=0:禁止外部中断1中断;
EX1=1:允许外部中断1中断。
5. ET0:定时器/计数器T0的溢出中断允许位
ET0=0:禁止T0溢出中断;
ET0=1:允许T0溢出中断。
6. EX0:外部中断0中断允许位。
EX0=0:禁止外部中断0中断;
EX0=1:允许外部中断0中断。
MCS-51复位后,IE清0,所有中断请求被禁止。若使某一个中断源被允许中断,除了IE相应的位被置“1” ,还必须使EA位=1。改变IE的内容,可由位操作指令或字节操作指令来实现。
定时器/计数器工作方式
在MCS-51系列单片机中,定时器/计数器(T0、T1)具有多种工作方式,当选择工作方式不同,定时/计数器的使用方法差别很大。MCS-51单片机片内的定时器/计数器可以通过对特殊功能寄存器TMOD中的控制位 的设置来选择定时器方式或计数器方式;通过对M1 M0两位的设置来选择定时器/计数器的四种工作方式,下面具体讲解定时器/计数器的工作方式。
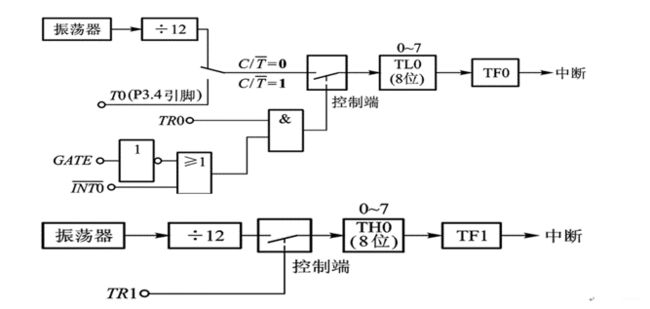
1. 工作方式0
定时器/计数器0、1在工作方式0时的电路逻辑结构见图9-2。工作方式0(M1 M0 = 0 0)是13位计数结构的工作方式,其计数器由TH的全部8位和TL的低5位构成,TL的高3位不使用。当 =0时,定时器/计数器0、1处于定时工作方式,多路开关接通振荡脉冲的12分频输出,13位计数器依次进行计数。当 =1时,定时器/计数器0、1处于计数工作方式,多路开关接通计数引脚(T0),外部计数脉冲由脚T0输入。当计数脉冲发生负跳变时,计数器加1。
当TL的低5位溢出时,都会向TH进位,而全部13位计数器溢出时,则会向计数器溢出标志位TF0进位。同时,GATA位的状态决定定时器运行控制取决于TR0一个条件还是TR0和/INT0引脚这两个条件。当GATA=1时,由于GATA信号封锁了与门,使引脚/INT0信号无效。而这时候如果TR0=1,则接通模拟开关,使计数器进行加法计数,即定时/计数器工作。而TR0=0,则断开模拟开关,停止计数,定时器/计数器不能工作。当GATA=0时,与门的输出端由TR0和INT0电平的状态确定,此时如果TR0=1,INT0=1与门输出为1,允许定时器/计数器计数,在这种情况下,运行控制由TR0和INT0两个条件共同控制,TR0是确定定时/计数器的运行控制位,由软件置位或清“0”。
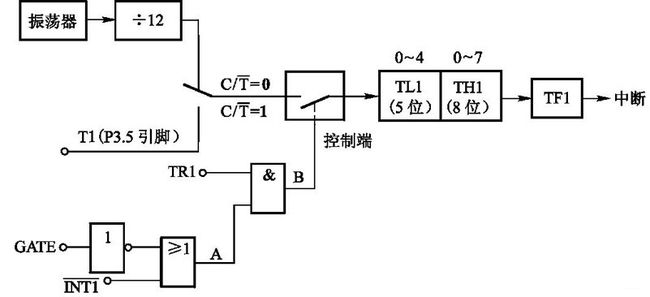
在工作方式0下,计数器的计数值X范围为1~8192(2131)。由于MCS-51单片机的T0和T1采用加计数,因此TH0(TH1),TL0(TL1)的初值N=8192-X。如当计数值X=1000,则计数初值N=7192=1C18H,那么TH0(TH1),TL0(TL1)的值分别为0E0H和18H。由于TL0(TL1)为低5为有效,所以该计数初值N不能简单地分成高8位和低8位赋值给TH0(TH1),TL0(TL1)。当计数初值N=7192=1C18H,其二进制编码如下
再将16位的二进制编码去除最高的3位,保留后面13位,并取低5位写入到TL0(TL1),高8位写入到TH0(TH1),具体操作如下
其中,11000B是TL0(TL1)对应的低5位,其16进制编码为18H,而1110 0000这8位为TH0(TH1)的内容,其16进制编码为0E0H。
当定时器/计数器工作于方式0且确定了定时时间T1后,其计数初值N的计算公式为
式中,fosc为系统时钟振荡频率。
假设单片机的晶振选为12MHz,需要用T0进行2ms定时控制,则T0的初值N计算为
则对应的13位二进制编码为1100 0001 1 0000则TH0=0C1H,TL0=10H
2. 工作方式1
定时器/计数器0、1工作于方式1时,其电路逻辑结构如图所示。
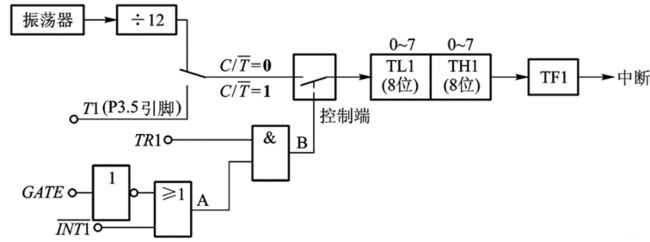
工作方式1(M1 M0=0 1)是16位计数结构的工作方式。方式0和方式1的区别仅在于计数器的位数不同,方式0为13位,而方式1则为16位,由TH0作为高8位,TL0为低8位,有关控制状态字(GATA、TF0、TR0)和方式0相同。
在工作方式1下,计数器的计数值X范围是:1~65536
当定时器/计数器工作于方式1且确定了定时时间T1后,其计数初值N的计算公式为:
则写入到8位寄存器TH0(TH1),TL0(TL1)值分别为
TH0(TH1)=N/256
TL0(TL1)=N%256
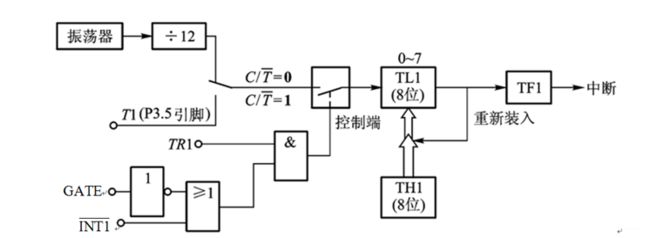
3. 工作方式2
当M1 M0=1 0时,定时器/计数器0、1处于工作方式2,此时其电路逻辑结构如图9-4所示。以定时/计数器0为例,定时/计数器1与之完全一致。
4. 工作方式3
当M1 M0 =1 1时,定时器/计数器工作于方式3下。方式3只适用于定时器T0,若将T1置为方式3,则它将停止计数,其效果相当于置TR1=0,即关闭定时器T1。当T0工作在方式3时,TH0和TL0被分成两个相互独立的8位计数器,其电路逻辑结构如图所示。
在工作方式3模式下,TL0既可以作为计数器使用,也可以作为定时器使用,定时器/计数器0的各控制位和引脚信号全归它使用。其功能和操作与方式0或方式1完全相同。但TH0的功能受到限制,只能作为简单的定时器使用,而且由于定时器/计数器0的控制位已被TL0占用,因此只能借用定时器/计数器1的控制位TR1和TF1,也就是以计数溢出去置位TF1,TR1则负责控制TH0定时器的启动和停止。由于TL0既能作定时器也能作计数器使用,而TH0只能作定时器使用而不能作计数器使用,因此在方式3模式下,定时/计数器0可以构成两个定时器或者一个定时器和一个计数器。
第三部分 定时器/计数器编程方法
定时器的初始化编程包括:
- 设置定时器工作模式(设置TMOD);
- 设置定时器计数初值(设置THx/TLx);
- 允许定时器中断(IE);
- 启动定时器(TCON)。
例如:
- 设置定时器工作模式(TMOD不能位寻址)
TMOD = 0x01; T0工作在模式 1下,16位定时器 - 设置定时器计数初值
计算初值公式 (T0定时模式2,8):
TH0=(28- 计数值) ; \ 8192 1s, 1us=110^6 ,50000,50ms
TL0=(28 -计数值);
计数值=定时时间/ 机器周期; 如果时钟频率fosc=12MHZ,则机
器周期=12时钟周期=12*1/fosc=1us。 6mhz,
PS:如果要求定时器按某固定时间间隔不断触发,需要在中断服务程
序中再次设置定时器计数初值(模式2除外),否则,中断服务程序以该模
式下的最大定时值工作。 - 允许定时器中断(中断号)
EA=1;ET0=1 - 启动定时器
定时器T0:TCON=0x10 或者 TR0=1
第四部分 定时器/计数器仿真设计
设计案例一
基于上述原理可以设计一个60s计时的秒表,完成秒表电路的设计与编程调试。
原理图

定时器T0或T1实现秒表的计时功能,工作模式不限,计时60s后自动从0开始重新计时, INT0中断方式实现秒表的启动和暂停计时; INT1中断方式实现秒表的计时重置。
动态仿真结果
代码
Keil代码如下:
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
sbit duan = P2^0;
sbit wei = P2^1;
sbit int0=P3^2;
sbit int1=P3^3;
uchar code LED_D[]={
0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
uchar code LED_W[]={
0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
uchar count=0;
uchar Time=0;
void Delay(uint x);//延迟函数
void Display2(uchar W1, Time);//显示函数
void QP();//清屏函数
//主函数
void main()
{
QP();
TMOD=0x01;//设置定时器工作方式
TH0=(65536-50000)/256;//计算初值,高8位
TL0=(65536-50000)%256;//计算初值,第8位
ET0=1;
EA=1; //开总中断
while(1)
{
if(int0==0)
{
Delay(100);
if(int0==0){
TR0=!TR0;
while(int0==0);}}
if(int1==0){
Delay(100);
if(int1==0)
{
Time=0;
}}
Display2(6,Time);
}
}
void LED_Flash() interrupt 1//中断函数
{
EA=0;//关总中断
TH0=(65536-50000)/256;//重装初值
TL0=(65536-50000)%256;//重装初值
if(++count==20) //开始计数
{
count=0;
Time++;
if(Time==61)
Time=0;
}
EA=1;
}
void Int0() interrupt 0
{
if(int0==0)
{
Delay(100);
if(int0==0)
{
TR0=!TR0;
while(int0==0);
}
}
}
void Int1() interrupt 2//中断函数
{
EA=1;
ET0=1;
if(int1==0){
Delay(10);
if(int1==0)
{
Time=0;
}
}
}
void Display2(uchar W1, Time)//显示函数
{
uchar shi,ge;
shi = Time/10;
ge = Time%10;
P0 = LED_D[shi];
duan = 1; duan = 0;
P0 = LED_W[W1];
wei = 1;
wei = 0;
Delay(3);
QP();
P0 = LED_D[ge];
duan = 1;
duan = 0;
P0 = LED_W[W1+1];
wei = 1;
wei = 0;
Delay(3);
QP();
}
void QP()
{
P0=0x00;
duan = 1; duan = 0;
wei = 1; wei = 0;
}
void Delay(uint x) //延时
{
uchar t;
while(x--) for(t=0;t<110;t++);
}
设计案例二
利用T0、T1计数器功能,实现按键计数,计数值分别在2个4位数码管上显示。
原理图
- 利用定时器T0工作模式2,中断方式,计数初值为0,数码管显示3位数
- T1工作模式不限,非中断方式,计数初值为256,数码管显示3位数
- INT0中断方式实现T0、T1计数清零

动态仿真结果

通过不同的按键来实现对应的计数功能,利用定时器的计数功能可以使得单片机得到快速响应。
代码
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
sbit duan = P2^0;
sbit wei = P2^1;
uchar code LED_D[]={
0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
uchar code LED_W[]={
0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
uint count1,count2;
void Delay(uint x);
void Display2(uchar W1,uint count);
void QP();
void main()
{
QP();
EA=1; //开总中断
TMOD=0x46; //设置定时器工作方式
TH0=TL0=0; //设定初值
TH1=1;TL1=0;
ET0=1;
EX0=1;
IT0=1;
TR0=1;
TR1=1;
while(1)
{
if(TF1==1) TF1=0;
count1 = TL0;
count2 = TH1*256+TL1;
Display2(1,count1);
Display2(5,count2);
}
}
void Flash() interrupt 1
{
EA=0;
TL1=0;
EA=1;
}
void Clear() interrupt 0
{
TL0=0;
TL1=0;
}
void Display2(uchar W1, uint count)
{
uchar bai,shi,ge;
bai = count%1000/100;
shi = count%100/10;
ge = count%10;
P0 = LED_D[bai];
duan = 1; duan = 0;
P0 = LED_W[W1];
wei = 1;
wei = 0;
Delay(3);
QP();
P0 = LED_D[shi];
duan = 1;
duan = 0;
P0 = LED_W[W1+1];
wei = 1;
wei = 0;
Delay(3);
QP();
P0 = LED_D[ge];
duan = 1;
duan = 0;
P0 = LED_W[W1+2];
wei = 1;
wei = 0;
Delay(3);
QP();
}
void QP()
{
P0=0x00;
duan = 1; duan = 0;
wei = 1; wei = 0;
}
void Delay(uint x)
{
uchar t;
while(x--) for(t=0;t<110;t++);
}
以上就是本次定时器/计数器的全部内容,希望通过本次的讲解能够加深大家对于定时器/计数器以及中断的理解。文章的内容可能存在部分不足之处,如有错误,请在评论区指出,谢谢。如果大家觉得文章有用,麻烦点赞关注,感谢支持,后续将会推出单片机的进阶设计文章。