pix4d怎么查看点云数据_经验分享 |云实验室引入PIX4D空三成果(方法二)

点击上方关注我们!
一、准备数据
1.PIX4D空三成果数据

2.原始影像

二、原始数据分析
1.航带排列
查看PIX4D视图窗口中“地图视图”,判断每条航线的首尾像片编号

从视图窗口判断,本数据共3条航线,分别为:
第1航线DJI_0027.JPG- DJI_0037.JPG
第2航线DJI_0055.JPG- DJI_0044.JPG
第3航线DJI_0066.JPG- DJI_0076.JPG
注意:本方法引入,请自动去除转弯片等无效影像。
2.影像旋转
根据影像首尾编号,查看原始影像旋转情况,如:
第1条航线为DJI_0027.JPG- DJI_0037.JPG升序排列情况,DJI_0027.JPG在DJI_0028.JPG影像左侧,应顺时针旋转90度才能保证正确的重叠关系。

第2条航带影像,从DJI_0055.JPG- DJI_0044.JPG左到右降序排列,DJI_0055.JPG在DJI_0054.JPG影像左侧,应顺时针旋转90度才能保证正确的重叠关系。

注意:同一航线旋转规律一致,每条航线分享2张相邻影像即可,本样例数据3条航带影像均顺时针旋转90度。
3.相机参数旋转
根据上步中分析的影像旋转情况,将相机参数做相应的旋转。如本样例数据中,原pix4d中参数如下

相机参数旋转分析处理前后情况如下图:
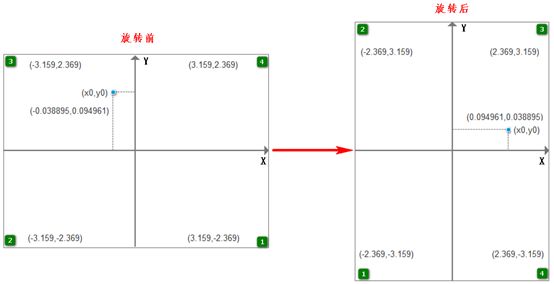
注意:旋转重点在于像主点正负和大小的变化及框标坐标宽高的变化,框标序号按顺序依次记录即可。
三、云桌面中引入pix4d操作流程
1.新建VZ工程1打开VirtuoZo生产版,选择测区-新建测区。


在弹出的“测区参数”对话框中,指定新建工程目录,选择影像类型为“量测数码相机”

选择测区管理-相机参数菜单项
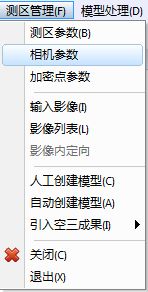
在弹出的“管理相机对话框”,选中相机文件列表中默认相机文件,填写前面分析处理后的相应相机参数。

选择测区管理-输入影像菜单项
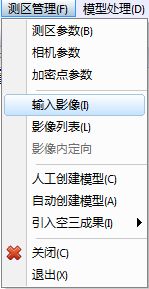
在弹出的“输入影像”窗口,分别进行如下操作:

设置像素大小,按相机文件中毫米单位和像素单位的像幅大小解算,像素大小=6.3174999999999999/4000=4.7381250000000001/3000=0.001579375


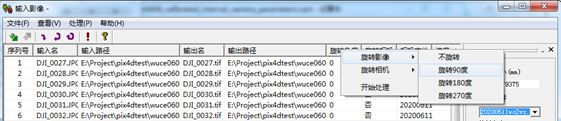
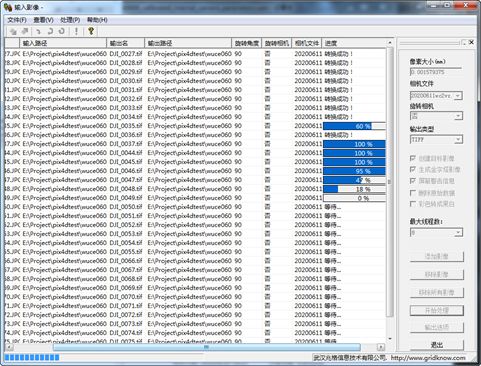
点击【开始处理】,该步骤将原始影像引入到当前工程目录下,同时进行影像格式转换和旋转。
选择测区管理-影像列表菜单项

在弹出的“VzImgList”窗口中按原始数据分析中分析的航带排列情况,设置航带排列并保存。


选择测区管理-引入空三成果-外方位元素引入菜单项
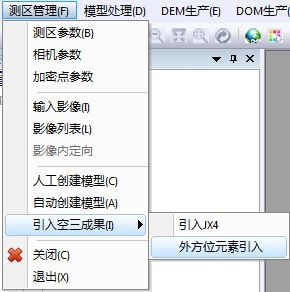
在弹出的“引入外方位元素”窗口中,依次完成如下操作:

指定引入的空三成果外方位元素文件

注意:指定文件不是PIX4D默认的文件格式,需要修改格式如下:第一行为测区影像总数,像片编号需要与引入到VZ测区目录下的影像名称保持一致(包含影像后缀名)

设置自定义文件格式
转角系统选择“Omega Phi(+) Kapa”,角度单位为“角度”,分度单位为“360”
4编辑外方位元素,选择旋转角度为“90”(此处旋转角度与原始影像选择角度保持一致),点击【旋转】按钮即可
5点击【确定】按钮,弹出如下提示窗口,引入完成

点击【确定】,退出引入窗口。
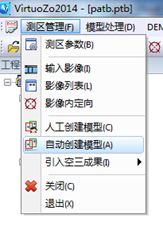
6.自动创建模型1选择测区管理-自动创建模型菜单项
创建模型完成后弹出如下提示

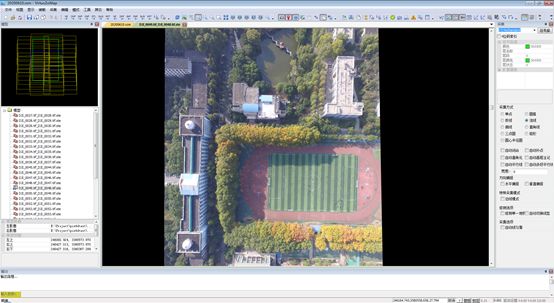
点击提示框【确定】按钮,创建好的模型在工程视图窗口-模型列表中显示,且视图窗口显示测区模型叠加效果。

End
云实验室平台下载地址 http://www.gridknow.com/download.html1


扫码关注

![]()
◆经验分享 |云实验室引入PIX4D空三成果(方法一)
◆摄影测量云开放实验室——让教学实训上云!
◆新手指南:云实验室用户向导
◆行业方案:摄影测量云实验室【VirtuoZo.iLab】