基于Python_Opencv识别图像轮廓
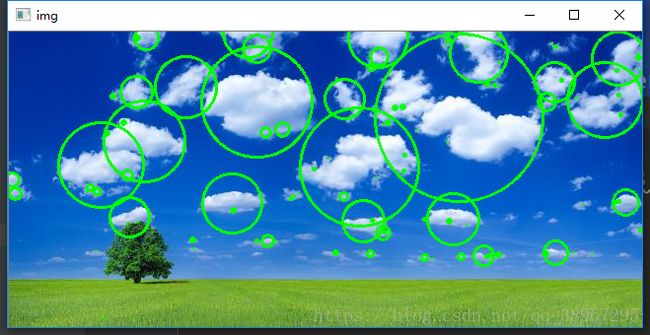
要求:用矩形或者圆形框住图片中的云朵(不要求全部框出)

轮廓检测
Opencv-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓。
import cv2
img = cv2.imread('cloud.jpg')
# 灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, binary = cv2.threshold(gray, 175, 255, cv2.THRESH_BINARY)
img1, contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 以圆形框出云朵
# for i in range(len(contours)):
# (x, y), radius = cv2.minEnclosingCircle(contours[i])
# center = (int(x), int(y))
# radius = int(radius)
# img = cv2.circle(img, center, radius, (0, 255, 0), 2)
#以云朵边界轮廓框出云朵
cv2.drawContours(img, contours, -1, (0, 0, 255), 3)
cv2.imshow("img", img)
cv2.waitKey(0)
需要注意的是cv2.findContours()函数接受的参数为二值图,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图。
cv2.findContours()函数
函数的原型为:
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]]) 返回两个值:contours,hierarchy。注:opencv3会返回三个值,分别是img, countours, hierarchy
参数说明
第一个参数是寻找轮廓的图像
第二个参数表示轮廓的检索模式,有四种:
1. cv2.RETR_EXTERNAL表示只检测外轮廓
2. cv2.RETR_LIST检测的轮廓不建立等级关系
3. cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
4. cv2.RETR_TREE建立一个等级树结构的轮廓。
第三个参数method为轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,
即 max(abs(x1−x2),abs(y2−y1))==1 m a x ( a b s ( x 1 − x 2 ) , a b s ( y 2 − y 1 ) ) == 1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
返回值
cv2.findContours()函数返回两个值,一个是轮廓本身,还有一个是每条轮廓对应的属性。
contour返回值
cv2.findContours()函数首先返回一个list,list中每个元素都是图像中的一个轮廓,用numpy中的ndarray表示。这个概念非常重要。在下面drawContours中会看见。可以打印观察contours的数据类型。
print (type(contours))
print (type(contours[0]))
print (len(contours)) hierarchy返回值
该函数还可返回一个可选的hiararchy结果,这是一个ndarray,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。

轮廓的绘制
OpenCV中通过cv2.drawContours在图像上绘制轮廓。
cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset ]]]]]) - 第一个参数是指明在哪幅图像上绘制轮廓;
- 第二个参数是轮廓本身,在Python中是一个list;
- 第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓。
- 后面的参数很简单。其中thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。

OpenCV中通过cv2.minEnclosingCircle()可以帮我们找到一个对象的外接圆。它是所有能够包括对象的圆中面积最小的一个。
(x,y),radius = cv2.minEnclosingCircle(contours[i])
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0,255,0),2)