PyTorch中RNN相关学习笔记
PyTorch中RNN相关学习笔记
- 前言
- Torch.nn.RNN
-
- 官方API文档
-
- 描述
- 参数
- 输入输出
- 输入输出形状及变量
- 小结
- Coding Examples
-
- 简单RNN
- 双向RNN
- Torch.nn.GRU 和 Torch.nn.LSTM
-
- GRU官方文档
-
- 描述
- 参数、输入输出及形状
- 变量
- LSTM官方文档
-
- 描述
- 输入输出
- 变量
- Coding Examples
- 拜拜语
前言
一周多前打算从Tensorflow转PyTorch,感觉神经网络中RNN相关的一系列概念算是最复杂的了,需要沉下心来好好学学!
Torch.nn.RNN
官方API文档
描述
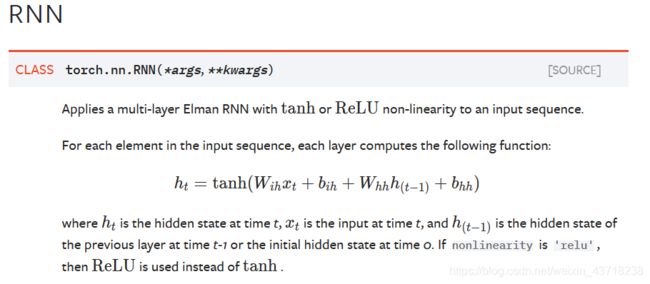
实现以 t a n h tanh tanh或 R e L U ReLU ReLU为激活函数的多层RNN,PyTorch里 h t h_t ht为所谓的隐藏状态(hidden state),其实是我认知中的 a < t > \mathbf{a^{
a < t > = g ( W a [ a < t − 1 > , x < t > ] + b a ) \mathbf{a^{
参数

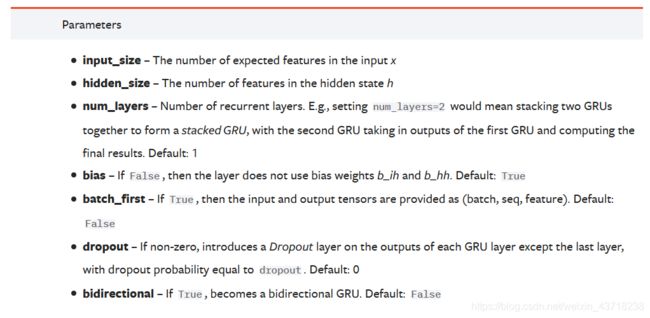
input_size:输入x的维度(即特征features空间对应的维度)
hidden_size:隐藏状态的维度
num_layers:堆叠层数,默认为一层。
nonlinearity:非线性激活函数,默认tanh,可选relu。
bias:若为False则无bias
batch_first:若为True,则输入输出Shape为(batch_size,time_step, input_size),默认为False,就是说我们的输入输出要尽量保持为(time_step, batch_size, input_size), 然而常用的Shape其实是batch_size在前,这就需要我们在输入RNN前做permute
dropout:随机失活概率,若有值则给除了最后一层的所有层加上dropout层;默认为0。
bidirectional:若为True,则为双向RNN。使用双向RNN时,隐藏状态的维数应该需要变化。
输入输出
 输入:
输入:
input:Shape为(time_step, batch_size, input_size),其中input_size即features,指的是每个时间步上的特征维度。
h_0:Shape为(num_layers * num_directions, batch_size, hidden_size),每个batch的初始状态( a < 0 > \mathbf{a^{<0>}} a<0>),默认初始状态为0。num_directions只有1和2,2为双向RNN的情况。
输出:
output:Shape为(time_step, batch_size, num_directions * hidden_size)。这里的output是RNN最后一层 (不是最后一个时间步) 计算的隐藏状态 h [ l ] h^{[l]} h[l](即 a [ l ] \mathbf{a^{[l]}} a[l]),也就是说输出 y y y需要
y = g ( W y a a [ l ] + b y ) = g ( W ∗ o u t p u t + b y ) \mathbf{y}=g(\mathbf{W_{ya}a^{[l]}+b_y})=g(\mathbf{W*output+b_y}) y=g(Wyaa[l]+by)=g(W∗output+by)
使用双向RNN时,可以output.view(time_step, batch_size, num_directions, hidden_size)来把forward([0])和backward([1])分开。
h_n:Shape为(num_layers * num_directions, batch_size, hidden_size),最后一个时间步的隐藏状态 a < t > \mathbf{a^{h_n.view(num_layers, num_directions, batch_size, hidden_size) 将双向RNN的前向和后向分开。
输入输出形状及变量
 输入输出形状需要注意的是Input2(h_0, initial hidden state)的最后一个维度hidden size决定了输出的最后一个维度,即最后一层隐藏状态output1的最后一个维度为num_directions * hidden size, 最后一个时间步隐藏状态output2(h_n)的最后一个维度就是输入的初始状态h_0的最后一个维度hidden size。
输入输出形状需要注意的是Input2(h_0, initial hidden state)的最后一个维度hidden size决定了输出的最后一个维度,即最后一层隐藏状态output1的最后一个维度为num_directions * hidden size, 最后一个时间步隐藏状态output2(h_n)的最后一个维度就是输入的初始状态h_0的最后一个维度hidden size。
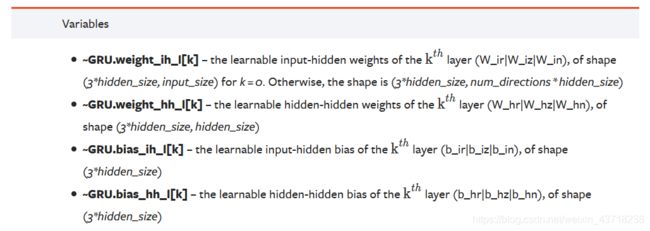
生成变量:
RNN.weight_ih_l[k] - W i h [ k ] W_{ih}^{[k]} Wih[k], x < t > x^{
RNN.weight_hh_l[k] - W h h [ k ] W_{hh}^{[k]} Whh[k], h < t > [ k ] h^{
RNN.bias_ih_l[k] - b i h [ k ] b_{ih}^{[k]} bih[k], 与 x < t > x^{
RNN.bias_hh_l[k] - b h h [ k ] b_{hh}^{[k]} bhh[k], 与 h < t > [ k ] h^{
 注意:初始权重和偏置均为如上的均匀分布
注意:初始权重和偏置均为如上的均匀分布
小结
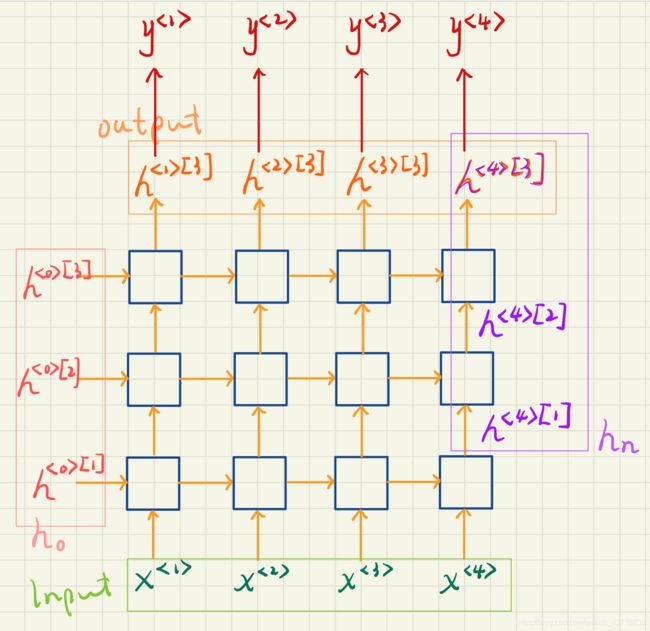
PyTorch中的input, h_0, output, h_n如下示意图所示,另外PyTorch中第一层是 l 0 l_0 l0。由图中可看出output[-1] 应该是要等于h_n[-1]的(在没有双向RNN的情况下),这将在代码部分验证
Coding Examples
上代码是比较重要的,嗯…不然就只是官方文档的翻译了…阅读文档只是为了辅助科研中的使用,毕竟RNN里边儿乱七八糟的东西太多了感觉。
import torch
import torch.nn.functional as F
简单RNN
验证形状是否正确
# input_size=hidden_size=1, layers=1
rnn = torch.nn.RNN(1, 1, nonlinearity='relu')
# time_step=16, batch_size=20, features=1
inputs = torch.ones([16, 20, 1])
# num_layers * num_directions = 1 * 1 = 1
h_0 = torch.zeros([1, 20, 1])
output, h_n = rnn(inputs, h_0)
# output shape: (time_step=16, batch_size=20, 1 * hidden_size = 1 * 1 = 1)
# h_n shape: (num_layer * num_directions = 1, batch_size = 20, hidden_size = 1)
# Validation:
print('output.shape: \t', output.shape)
print('h_n.shape: \t', h_n.shape)
输出结果:

与推测相符~
接下来检验内部运算,为避免偶然,将输入改为高斯分布:
# time_step=16, batch_size=20, features=1
inputs = torch.randn([16, 20, 1])
# num_layers * num_directions = 1 * 1 = 1
h_0 = torch.randn([1, 20, 1])
验证下式:
h t = R e L U ( W i h x t + b i h + W h h h ( t − 1 ) + b h h ) h_t = ReLU(W_{ih} x_t + b_{ih} + W_{hh} h_{(t-1)} + b_{hh}) ht=ReLU(Wihxt+bih+Whhh(t−1)+bhh)
对于output[0],它是第一个时间步上所有batch_size的最后一层隐藏状态( h < t > [ l ] h^{
w_ih = rnn.weight_ih_l0
w_hh = rnn.weight_hh_l0
b_ih = rnn.bias_ih_l0
b_hh = rnn.bias_hh_l0
print('rnn.weight_ih_l0: \t', w_ih)
print('rnn.weight_hh_l0: \t', w_hh)
print('rnn.bias_ih_l0: \t', b_ih)
print('rnn.bias_hh_l0: \t', b_hh)
h_1 = F.relu(w_ih * inputs[0] + b_ih + w_hh * h_0[0] + b_hh)
print('h_1: \n', h_1)
assert all(h_1[i] == output[0][i] for i in range(20))
接下来验证output[-1] 是否等于h_n[-1],注意这里的20和上面的20都是batch_size:
assert all(output[-1][i] == h_n[-1][i] for i in range(20))
双向RNN
INPUT_SIZE = 10
HIDDEN_SIZE = 20
NUM_LAYERS = 4
BATCH_SIZE = 5
TIME_STEP = 16
bi_rnn = torch.nn.RNN(INPUT_SIZE, HIDDEN_SIZE, NUM_LAYERS, nonlinearity='relu', bidirectional=True, bias=False)
inputs = torch.randn(TIME_STEP, BATCH_SIZE, INPUT_SIZE)
# Here num_directions = 2 since we are using bidirectional RNN:
h_0 = torch.randn(2 * NUM_LAYERS, BATCH_SIZE, HIDDEN_SIZE)
output, h_n = bi_rnn(inputs, h_0)
# Output should be in shape of (TIME_STEP, BATCH_SIZE, 2 * HIDDEN_SIZE)
# H_n should be in shape of (2 * NUM_LAYERS, BATCH_SIZE, HIDDEN_SIZE)
验证形状
# Validation:
assert output.shape[0] == TIME_STEP
assert output.shape[1] == BATCH_SIZE
assert output.shape[2] == 2 * HIDDEN_SIZE
assert h_n.shape[0] == 2 * NUM_LAYERS
assert h_n.shape[1] == BATCH_SIZE
assert h_n.shape[2] == HIDDEN_SIZE
实际上,在经典RNN中,最终输出 y < l > = g ( W y a a < l > + b y ) \mathbf{y^{
y < t > = g ( W y a [ a → < t > , a ← < t > ] + b y ) \mathbf{y^{
这里单个方向上的隐藏状态形状原本为([16, 5, 20]),拼接后将变为([16, 5, 40]):
# Separate the directions
output_reshape = output.view(TIME_STEP, BATCH_SIZE, -1, HIDDEN_SIZE)
# concatenate the both directions
output_cat = torch.cat([output_reshape[:, :, 0, :], output_reshape[:, :, 1, :]], dim=-1)
我们想要的输出 y y y的形状应该是([16, 5, 20]),于是这里创建形状为([20, 40])的权重和形状为([20])的偏置,与拼接后的隐藏状态相乘后通过一个 t a n h tanh tanh函数,得到最终输出y:
# weight_yh (hidden_size, 2 * hidden_size)
# bias_y (hidden_size)
w_yh = torch.randn([HIDDEN_SIZE, output.shape[2]])
b_y = torch.randn(HIDDEN_SIZE)
# (time_step, batch_size, 2 * hidden_size) * (2 * hidden_size, hidden_size)
y = torch.tanh(torch.matmul(output_cat, w_yh.T) + b_y)
y的形状是正确的:

接下来检查output的最后一个时间步是否等于h_n的最后一层。由于这里是双向RNN,把h_n按方向分开之后,对于forward的部分,应该有output[-1] == h_n[-1],而对于backward部分,output应该是反过来的,即output[0] == h_n[-1],因为backward output的第一个时间步就是相对于整个RNN来说的最后一个时间步。
# check the last time step of forward direction and the first time step of backward direction
h_n_reshape = h_n.view(NUM_LAYERS, -1, BATCH_SIZE, HIDDEN_SIZE)
assert (h_n_reshape[-1, 0, :, :] == output_reshape[-1, :, 0, :]).all()
assert (h_n_reshape[-1, 1, :, :] == output_reshape[0, :, 1, :]).all()
至此,最简单的RNN和双向RNN应该熟悉一些了~
Torch.nn.GRU 和 Torch.nn.LSTM
写着写着发现GRU和RNN的API真的很相似,所以把LSTM放到和GRU一起说,LSTM 加入的变化会多一些
GRU官方文档
描述
 r t r_t rt为重置门( Γ r < t > \Gamma_r^{
r t r_t rt为重置门( Γ r < t > \Gamma_r^{
参数、输入输出及形状
参数:
 和RNN的一样,只是没有提供
和RNN的一样,只是没有提供nonlinearity来选择激活函数,好!
看了一下输入输出和形状都和RNN一样,这里也就不截图了前面的RNN熟悉之后后面的轻松很多~
变量
 这里的
这里的weight_ih指与输入x相乘的权重,因为涉及到两个门(reset gate, Γ r < t > \Gamma_r^{weight_hh、以及两个偏置bias_ih和bias_hh也是如此。
 权重和偏置同样也是以均匀分布进行初始化。
权重和偏置同样也是以均匀分布进行初始化。
LSTM官方文档
描述
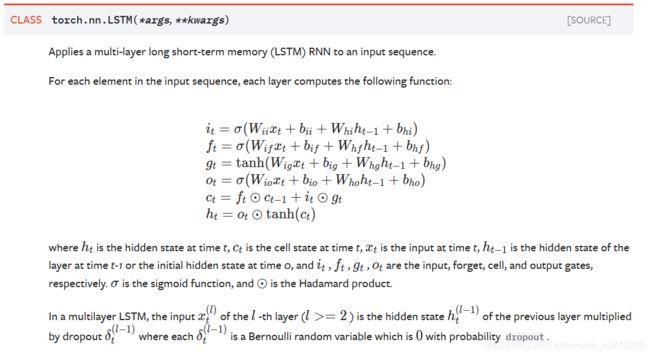 第一眼看这个的时候…什么乱七八糟的,好好起名字会死吗…不管文档里怎么定义了,我只要我觉得…
第一眼看这个的时候…什么乱七八糟的,好好起名字会死吗…不管文档里怎么定义了,我只要我觉得…
全部按我的来替换掉:
i t i_t it (update gate, Γ u < t > \Gamma_u^{
o t o_t ot (output gate, Γ o < t > \Gamma_o^{
那和三个门相关的更新公式就是:
c t = Γ f < t > ⊙ c t − 1 + Γ u < t > ⊙ c ~ < t > c_t=\Gamma_f^{
h t = Γ o < t > ⊙ t a n h ( c t ) h_t=\Gamma_o^{
输入输出
参数和GRU的一样就不提了,看输入输出:
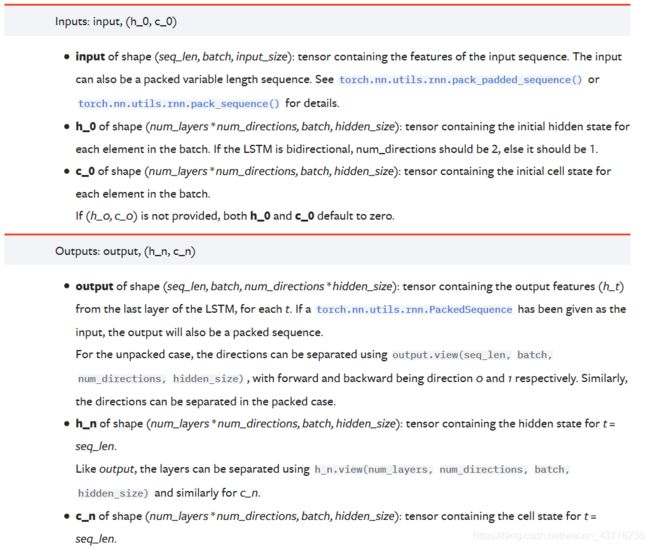 好家伙,多了个
好家伙,多了个c_0和c_n,所有和 c c c有关的都是memory cell记忆单元相关部分。事实上 c c c和 h h h因为保持着对应的关系(entity-wise product)所以有相同的形状,把这点牢记在心对LSTM的运用应该也不难把握了。
candidate cell( c ~ < t > \tilde{c}^{
另外小细节就是这里的输入h_0和c_0要以一个元组cell输入,即(h_0, c_0),输出也是以元组的形式输出的:(h_n, c_n);如果没注意到等报错了TypeError: forward() takes from 2 to 3 positional arguments but 4 were given就会注意到了…
变量
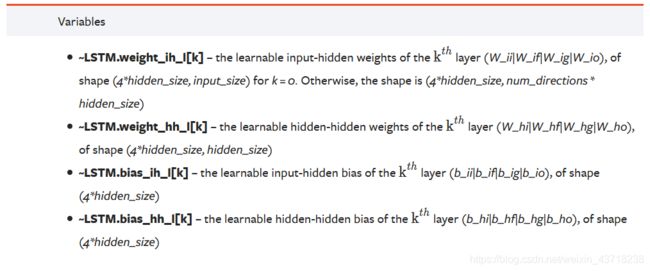
PyTorch里把candidate cell也叫做一个门:cell gate(单元门??),这样的话一个LSTM类里其实有四个门,那对应的权重和偏置相应的形状要乘以4。权重的初始化也和GRU一样。
当然啦我还是不习惯把candidate cell看作一个gate,因为它显然起的不是一个门的作用,而是新的记忆单元memory cell的候选项。
Coding Examples
GRU 和 LSTM 其实和前面的RNN在接口的使用上没有什么太大不同,不过是LSTM会多了一个memory cell而已,那我就只放一个LSTM的简单使用好了~
参数和之前的一样:
INPUT_SIZE = 10
HIDDEN_SIZE = 20
NUM_LAYERS = 4
BATCH_SIZE = 5
TIME_STEP = 16
简单的实现:
lstm = torch.nn.LSTM(INPUT_SIZE, HIDDEN_SIZE, NUM_LAYERS, bias=False)
inputs = torch.randn(TIME_STEP, BATCH_SIZE, INPUT_SIZE)
h_0 = torch.randn(NUM_LAYERS, BATCH_SIZE, HIDDEN_SIZE)
c_0 = torch.randn(NUM_LAYERS, BATCH_SIZE, HIDDEN_SIZE)
outputs, (h_n, c_n) = lstm(inputs, (h_0, c_0))
还有一个更简单的:
outputs, (h_n, c_n) = lstm(inputs)
如果接受 h h h和 c c c的初始值都是0的话完全可以不输入h_0和c_0~
拜拜语
有前言要有结语,到这里为止其实还只是开始。
祝大家学业有成,新年快乐~
(看论文去了…)