尝试cartographer中使用scan和odom来建图,失败(可能实验室的中继机器人odom有问题)总结
1、在提供中继机器人的代码中修改
modbus协议代码修改:
SineBotVel get_vel()
{
SineBotVel bot_vel;
memset(&bot_vel,sizeof(bot_vel),0);
if (m_modbus == NULL) {
return bot_vel;
}
int ret;
float vel[2] = {
0.0};
while(ret !=4) //添加
{
ret = modbus_read_input_registers(m_modbus, LINEAR_VEL_X_ADDR, 4, (uint16_t *)&vel); //读入数据,存到vel中
}
ret = modbus_read_input_registers(m_modbus, LINEAR_VEL_X_ADDR, 4, (uint16_t *)&vel);
// if(ret == 4)
// {
bot_vel.linear_vel_x.vel = vel[0];
bot_vel.angular_vel_z.vel = vel[1];
bot_vel.linear_vel_y.vel = 0;
// }
// else
// {
// ROS_INFO("vel recive ret : %d \r\n" ,ret);
// }
return bot_vel; //结构体中的xyz值
}
此时机器人的odom解决,里程计可以正常读数,不会出现之前的nan值,x,y值都是正确的。
2、tf变换
之前在turtlebot中robotmodel加载失败,这里在中继机器人中添加urdf文件和tf变换文件。
urdf文件建立(四轮):
chuan_urtf_xx.launch:
<?xml version="1.0"?>
<launch>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find chuan_bringup)/urdf/chuan_xx.urdf.xacro'"/>
<param name="use_gui" value="False"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"></node>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">
<param name="publish_frequency" type="double" value="30.0"/>
<!--param name="tf_prefix" type="string" value="" /-->
</node>
</launch>
chuan_xx.urdf.xacro:
<?xml version="1.0"?>
<robot name="chuan_xx" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find chuan_bringup)/urdf/properties_xx.urdf.xacro" />
<xacro:include filename="$(find chuan_bringup)/urdf/chuan.urdf.xacro" />
<xacro:include filename="$(find chuan_bringup)/urdf/basefoot_xx.urdf.xacro" />
</robot>
properties_xx.urdf.xacro:
<?xml version="1.0"?>
<robot xmlns:xacro="http://ros.org/wiki/xacro">
<material name="blue">
<color rgba="0 0 0.8 0.5"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<material name="white">
<color rgba="1 1 1 0.5"/>
</material>
<material name="fense">
<color rgba="0.3 0 0.3 0.8"/>
</material>
</robot>
chuan.urdf.xacro:
<?xml version="1.0"?>
<robot name="chuan" xmlns:xacro="http://ros.org/wiki/xacro">
<link name="base_link">
<visual>
<geometry>
<box size="0.7 0.3 0.3"/>
</geometry>
<material name="fense"/>
</visual>
</link>
<link name="laser"> <!--velodyne -->
<visual>
<geometry>
<cylinder length="0.07" radius="0.05"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="laser_to_base_link" type="fixed"> <!--velodyne_to_base_link -->
<parent link="base_link"/>
<child link="laser"/> <!--velodyne -->
<origin rpy="0 0 0" xyz="0.3 0.0 0.1"/>
</joint>
</robot>
basefoot_xx.urdf.xacro:
<?xml version="1.0"?>
<robot name="chuan_xx" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- base_footprint is a fictitious link(frame) that is on the ground right below base_link origin,
navigation stack dedpends on this frame -->
<link name="base_footprint">
<inertial>
<mass value="1.0"/>
<origin xyz="0 0 0"/>
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.01 0.01 0.01"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<!-- represent base collision with a simple rectangular model, positioned by base_size_z s.t. top
surface of the collision box matches the top surface of the PR2 base -->
<origin rpy="0 0 0" xyz="0 0 0.071"/>
<geometry>
<box size="0.001 0.001 0.001"/>
</geometry>
</collision>
</link>
<joint name="base_footprint_joint" type="fixed">
<origin rpy="0 0 0" xyz="0 0 0.051"/>
<child link="base_link"/>
<parent link="base_footprint"/>
</joint>
</robot>
tf变换代码:map到odom到base_footprint
tf_odom.launch:
<launch>
<!-- gps reading Node-->
<!-- <node pkg="chuan_bringup" type="odom_fake" name="odom_fake" output="screen"/> -->
<node pkg="chuan_bringup" type="tf_changemap11" name="odom_basefootprint" />
<node pkg="chuan_bringup" type="tf_changemaptd11" name="odom_map" />
</launch>
tf_changemap11.cpp:
#include tf_changemaptd11.cpp:
#include CMakeLists.txt:
add_executable(tf_changemap11 src/tf_changemap11.cpp)
target_link_libraries(tf_changemap11
${
catkin_LIBRARIES}
)
add_executable(tf_changemaptd11 src/tf_changemaptd11.cpp)
target_link_libraries(tf_changemaptd11
${
catkin_LIBRARIES}
)
运行:
roslaunch chuan_bringup chuan_urtf_xx.launch
roslaunch chuan_bringup tf_odom.launch
上面就发布了机器人的laser,base_link,base_footprint的关系,还有odom,map的关系,如下图:
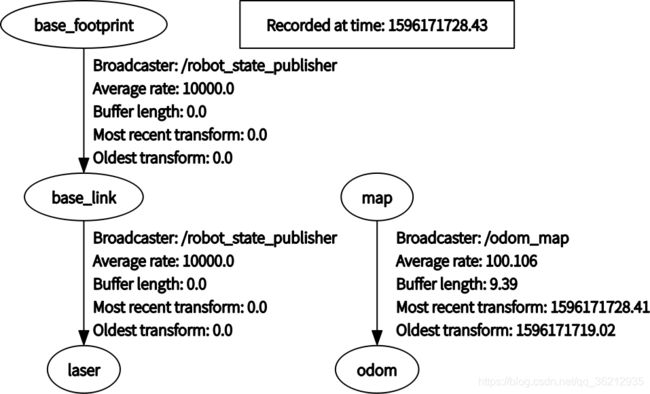
在有正确的odom数据情况下,会有odom到base_footprint的关系,关系图如下:

上面说明正确性,具体情况还要加以讨论,毕竟初学。
3、修改lua参数
在demo_hokuyo.lua中修改
注:这里是失败的,后面在turtlebot上调,暂时先总结
map_frame = "map", --父框架
tracking_frame = "odom", --SLAM算法跟踪帧,imu为“imu_link”
published_frame = "odom", --发布帧base_footprint
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = true,
4、运行代码
source install_isolated/setup.bash
roslaunch cartographer_ros demo_hokuyo.launch
5、建图效果
节点关系:

建的地图:
 这里出现了重影,失败。
这里出现了重影,失败。
总结
明确一点,最终目标建图。
这只是尝试cartographer加上sacn和odom建图,之前上一次博客做了cartographer和激光雷达建图,效果已出,没有在比较的情况和数据的支撑下,不能说明建的地图好坏,是否可以使用。
这里加上odom是为了“一时兴起”,也是学习。在中继机器人太难了,后面有时间在turtlebot平台上跑cartographer建图。
后面的turtlebot上,注意lua参数配置。
注意看topic和tf_tree,这能更好直观的学习。