Zero-Shot Learning论文学习笔记(第三周)
Zero-Shot Learning论文学习笔记(第三周)
- Feature Generating Networks for Zero-Shot Learning
-
- 原文链接:
- 摘要
- 算法简介:
-
- 使用GAN在特征空间生成数据的原因
- 1.f-GAN
-
- 1.1 original-GAN
- 1.2.conditional-GAN
-
- 1.3.f-GAN
- 2.f-WGAN
-
- 2.1.Wasserstein GAN
- 2.2. f-WGAN
- 3.f-CLSWGAN
- 4. Discriminator的架构
- 实验
-
- 1.f-CLSWGAN模型在ZSL和GZSL任务上的性能。
-
- 数据集简介
- 关于准确率
- f-xGAN各种变体在ZSL和GZSL任务上的性能
- 不同条件下分析f-xGAN各种变体
- f-CLSWGAN在不同CNN网络结构下的表现情况
Feature Generating Networks for Zero-Shot Learning
原文链接:
http://openaccess.thecvf.com/content_cvpr_2018/papers/Xian_Feature_Generating_Networks_CVPR_2018_paper.pdf
摘要

深度学习经常被用于计算机视觉任务中,但是深度学习需要大量的训练数据,然而实际情况中常常缺乏这些数据,这也就造成了seen class和unseen class训练数据大多数情况下的极度不平衡。
GAN网络可以生成很真实且清晰的图像,但是由于这种图像类别间的不平衡,现有的ZSL方法在GZSL任务上的性能很差。
文章提出基于GAN框架,利用语义信息来生成不可见类的CNN特征。文章的方法利用Wasserstein GAN和分类损失,生成判别性强的CNN特征,来训练分类器。作者的实验结果表明,在零样本学习和广义零样本学习设置中,在五个具有挑战性的数据集(CUB,FLO,SUN,AWA和ImageNet)上的准确率比其他方法有显著提高。
由下图所示,CNN的特征可以从以下几个方面提取:
1)真实图像,但是在零次学习中,无法获得任何不可见类的真实图像;
2)合成图像,但是它们不够精确,无法提高图像分类性能。
文章为了解决了这两个问题,提出了一种新的基于属性条件特征生成对抗性网络公式,即f-CLSWGAN,用于生成不可见类的cnn特征。
论文提出了两个任务,zero shot learning (ZSL)和generalized zero shot learning(GZSL),前者只需要解决未见过的数据的分类任务,后者需要同时对见过的和未见过的数据进行分类。
算法简介:
使用GAN在特征空间生成数据的原因
文章提到了DC-GAN,InfoGAN和Wasserstein-GAN(WGAN),指出这些先进的GAN虽然已经可以生成逼真的图像,但是并没有将这一思想应用到图像特征生成中的先例。
(1)生成的特征数据是无限制的。
(2)生成的特征通过大规模数据集学习到的具有代表性的特征表示,可以在某种程度上泛化未知类别的特征。
(3)学习的特征具有很强的判别性。
- 作者使用三种conditional GAN的变体来循序渐进的生成图像特征:embedding feature。
- 首先通过下式表示可见类和不可见类。
S = { ( x , y , c ( y ) ) ∣ x ∈ X , y ∈ Y s , c ( y ) ∈ C } S = \{ ( x , y , c ( y ) ) | x \in X , y \in Y ^ { s } , c ( y ) \in C \} S={ (x,y,c(y))∣x∈X,y∈Ys,c(y)∈C}
U = { ( u , c ( u ) ) ∣ u ∈ Y u , c ( u ) ∈ C } U = \{ ( u , c ( u ) ) | u \in Y ^ { u } , c ( u ) \in C \} U={ (u,c(u))∣u∈Yu,c(u)∈C}
其中 S S S代表可见训练集全体, x ∈ R d x x \in R ^ { d _ { x } } x∈Rdx是CNN特征, y s = { y 1 , . . . , y k } y^s=\{y_1,...,y_k\} ys={ y1,...,yk}代表有 k k k个不交叉的可见类, y y y代表类标签, c ( y ) ∈ R d c c(y)\in R^{d_c} c(y)∈Rdc代表y类的embedding 属性集,由语义向量构成。
U代表不可见类,与可见类相比,缺少了图像和图像特征,也就缺少了CNN特征。 - 在给出S和U的类别定义后,文章给出ZSL和GZSL的任务要求:
ZSL的任务:学习一个分类器 f z s l : X → Y u f_{zsl}:X\to Y^u fzsl:X→Yu;
GZSL的任务:学习一个分类器 f g z s l : X → Y s ∪ Y u f_{gzsl}:X\to Y^s \cup Y^u fgzsl:X→Ys∪Yu。
1.f-GAN
- f-GAN的目标是学习一个条件生成器 G : Z × C → X G:Z\times C\to X G:Z×C→X
其中Z是从高斯分布中随机采样的噪声 z ∈ Z ⊂ R d z z \in Z \subset R ^ { d _ { z } } z∈Z⊂Rdz, c ( y ) ∈ C c(y)\in C c(y)∈C是类别 y y y的语义向量,这两者作为输入。 x ^ ∈ X \hat { x } \in X x^∈X是 y y y类中的CNN feature,作为输出。
1.1 original-GAN
- 传统的GAN网络的损失函数如下:
min G max D G A N = E x ∼ P data [ log D ( x ) ] + E z ∼ P z [ log ( 1 − D ( G ( z ) ) ) ] { \operatorname { min } _ { G } \operatorname { max } _ { D } G A N } = E _ { x \sim P _ { \text { data } } } [ \operatorname { log } D ( x ) ] + E _ { z \sim P _ { z } } [ \operatorname { log } ( 1 - D ( G(z) ) ) ] minGmaxDGAN=Ex∼P data [logD(x)]+Ez∼Pz[log(1−D(G(z)))]
算法&训练步骤如下图所示。

- distribution 可以是Gaussian distribution或Uniform distribution等等
- generated data x ^ \hat { x } x^为生成的图片
- 分类器 D D D的最后一层为Sigmoid,保证生成的值在0~1之间
- 因为要让 V ^ \hat{V} V^越大越好,所以采用gradient ascent方法更新判别器 D D D的参数 θ d \theta_d θd
- Lerning D 和Learning G过程中的random vectors 可以不同
1.2.conditional-GAN
conditional-GAN的大致训练过程如下图所示。与传统的GAN相比,conditional-GAN的 G G G在接受一个distribution z z z的同时还接受一个文本描述(语义) c c c, D D D在接受 G G G生成的图片 x x x同时接受文本描述 c c c, x x x的真实度和 c c c与 x x x匹配程度
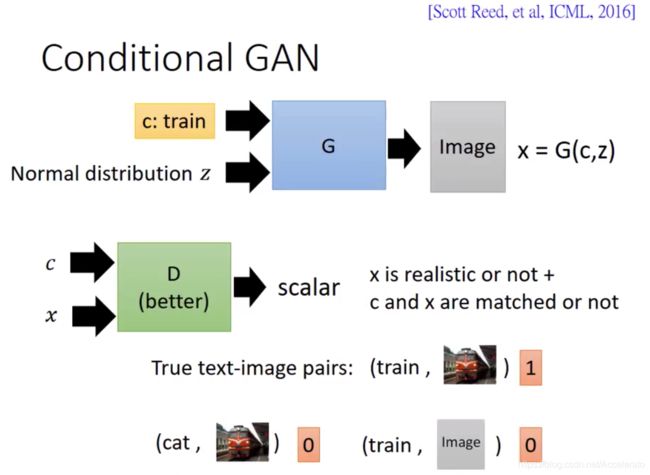
在 conditonal-GAN中 D D D和 G G G的学习步骤如下所示。

1.3.f-GAN
- f-GAN的损失函数如下:
min G max D L G A N = E [ log D ( x , c ( y ) ) ] + E [ log ( 1 − D ( x ~ , c ( y ) ) ) ] \left. \begin{array}{l}{ \operatorname { min } _ { G } \operatorname { max } _ { D } L _ { G A N } = E [ \operatorname { log } D ( x , c ( y ) ) ] + }{ E [ \operatorname { log } ( 1 - D ( \tilde { x } , c ( y ) ) ) ] }\end{array} \right. minGmaxDLGAN=E[logD(x,c(y))]+E[log(1−D(x~,c(y)))]
其中 x ^ = G ( z , c ( y ) ) \hat { x }=G(z,c(y)) x^=G(z,c(y)), c ( y ) c(y) c(y)是类别 y y y的语义向量。判别器 D : X × C → [ 0 , 1 ] D:X\times C\to [0,1] D:X×C→[0,1]的最后一层是Sigmoid函数。 D D D试图最大化 l o s s loss loss,而生成器 G G G试图最小化 l o s s loss loss。因为 x ~ \tilde { x } x~和 c ( y ) c ( y ) c(y)属于相同类,所以在loss function中不需要考虑不匹配的问题。
- 文章指出了f-GAN的不足之处:虽然GAN能够捕获复杂的数据分布(比如生成图片),但它的训练过程很困难。
2.f-WGAN
2.1.Wasserstein GAN
在original-GAN中衡量的是generated data和real-data之间的JS divergence。但由于两者的distribution往往没有任何重叠,下图给出了没有重叠的两个原因。
- P G P_G PG和 P d a t a P_data Pdata的支撑集是高维空间中的低维流形。
- 如果没有足够多的样本, P G P_G PG和 P d a t a P_data Pdata即使重叠概率也很低。

可以证明,当 P G P_G PG和 P d a t a P_data Pdata不重叠时两者的JS divergence 是 l o g 2 log2 log2
为了解决这个问题,2017的Wasserstein GAN的paper中提出了Wasserstein distance的概念,Wasserstein distance又被称为Earth-Mover(EM)距离,直观解释图如下所示。

判别器 D D D通过下式训练得到的目标函数值就是Wasserstein distance。
max D ∈ 1 − L i p s c h i t z { E x ∼ P d a t a [ D ( x ) ] − E x ∼ P G [ D ( x ) ] } \operatorname { max } _ { D \in 1 - L i p s c h i t z } \{ E _ { x \sim P _ { d a t a } } [ D ( x ) ] - E _ { x \sim P _ { G } } [ D ( x ) ] \} maxD∈1−Lipschitz{ Ex∼Pdata[D(x)]−Ex∼PG[D(x)]}
可见,如果 x x x来自 P d a t a P_{data} Pdata,那么 D D D的output越大越好,如果来自 P G P_G PG,那么越小越好。同时, D D D必须是一个 1 − L i p s c h i t z 1-Lipschitz 1−Lipschitz 函数, L i p s c h i t z Lipschitz Lipschitz函数定义如下所示。
∣ f ( x 1 ) − f ( x 2 ) ∣ ≤ K ∣ x 1 − x 2 ∣ | f ( x _ { 1 } ) - f ( x _ { 2 } ) | \leq K | x _ { 1 } - x _ { 2 } | ∣f(x1)−f(x2)∣≤K∣x1−x2∣
这里不等式左边可以理解为为ouput的变化量,右边为input的变化量,所以 L i p s c h i t z Lipschitz Lipschitz 函数限制了input变化时output的变化范围,当 K K K为1时就是 1 − L i p s c h i t z 1-Lipschitz 1−Lipschitz 的形式。此时output的变化总是小于input的变化,也就保证了生成器 D D D的平滑。
2.2. f-WGAN
-
通过将生成器 G G G和判别器 D D D的语义属性混合文章把著名的Wasserstein GAN拓展为conditional WGAN。损失函数如下所示。
min G max D L W G A N = E [ D ( x , c ( y ) ) ] − E [ D ( x ~ , c ( y ) ) ] − λ E [ ( ∥ ∇ x ^ D ( x ^ , c ( y ) ) ∥ 2 − 1 ) 2 ] \left. \begin{array}{l}\operatorname { min } _ { G } \operatorname { max } _ { D } { L _ { W G A N } = E [ D ( x , c ( y ) ) ] - E [ D ( \tilde { x } , c ( y ) ) ] - }{ \lambda E [ ( \| \nabla _ { \hat { x } } D ( \hat { x } , c ( y ) ) \| _ { 2 } - 1 ) ^ { 2 } ] }\end{array} \right. minGmaxDLWGAN=E[D(x,c(y))]−E[D(x~,c(y))]−λE[(∥∇x^D(x^,c(y))∥2−1)2]其中 x ~ = G ( z , c ( y ) ) \tilde { x }=G(z,c(y)) x~=G(z,c(y))、 x ^ = α x + ( 1 − α ) x ~ \hat { x } = \alpha x + ( 1 - \alpha ) \tilde { x } x^=αx+(1−α)x~、 α ∼ U ( 0 , 1 ) \alpha \sim U(0,1) α∼U(0,1)、 λ \lambda λ 是处罚系数。 -
式子中的前两项是在近似Wasserstein distance,第三项是梯度惩罚项(gradient penalty),使得判别器D的梯度在1附近。
3.f-CLSWGAN
作者认为单纯使用WGAN还不足以使generator生成的features能够训练出一个好的分类器,所以作者提出分类损失并用采用负对数的形式刻画。
L C L S = − E x ~ ∼ p x ~ [ log P ( y ∣ x ~ ; θ ) ] L _ { C L S } = - E _ { \tilde { x } \sim p _ { \tilde { x } } } [ \operatorname { log } P ( y | \tilde { x } ; \theta ) ] LCLS=−Ex~∼px~[logP(y∣x~;θ)]
其中 x ^ = G ( z , c ( y ) ) \hat { x }=G(z,c(y)) x^=G(z,c(y))。分类器采用线性softmax分类器, P ( y ∣ x ~ ; θ ) P ( y | \tilde { x } ; \theta ) P(y∣x~;θ)表示 x ~ \tilde { x } x~被类别标签 y y y真实预测的概率。 分类器的参数θ是根据可见类的实际特征进行预训练的。
该分类损失可以看作是正则化项,迫使生成器构造判别性强的特征。
最终的损失函数如下所示,其中 β \beta β 是一个超参数权重。
min G max D L W G A N + β L C L S \operatorname { min } _ { G } \operatorname { max } _ { D } L _ { W G A N } + \beta L _ { C L S } minGmaxDLWGAN+βLCLS
4. Discriminator的架构
下图为Conditional GAN中两种经典的架构方式,当输出的score取低分时,第一种架构没有办法判断低分的原因是 x x x不够真实清晰还是与类别标签 c c c不匹配,第二个模型由于分别输出两个网络的socre,所以可以解决上述问题。

论文模型如下图所示,与上图的模型二类似。
图中第一行是真实图像的特征提取过程,里面的CNN可以通过用的GoogleNet或ResNet,可以是从ImageNet上预训练的模型,也可以是在特定任务中微调过的模型,本文中采用的预训练模型。将特征 x x x与 x x x所属类的属性描述 c ( y ) c(y) c(y)拼接后输入Discriminator并判别为真;
图中第二行是生成数据的分支,用normal distribution的 z z z与 c ( y ) c(y) c(y)拼接后输入生成器,生成特征xˆ再次将其与属性描述拼接后输入Discriminator并判别为假;同时输出 P ( y ∣ x ~ ; θ ) P ( y | \tilde { x } ; \theta ) P(y∣x~;θ)的值观察Generator构造的特征性的强弱。

实验
1.f-CLSWGAN模型在ZSL和GZSL任务上的性能。
数据集简介
1)Caltech-UCSD-Birds 200-2011 (CUB)包含来自200个鸟类的11788幅图片,并且带有312个属性描述,如图一中显示的头和腹部的颜色、鸟喙的形状等;
2)Ox- ford Flowers (FLO) 包含来自102类花的8189幅图片,没有属性描述;
3)SUN Attribute (SUN) 包含来自717个场景下的14340幅图片,并带有102个属性描述;
4)Animals with Attributes (AWA)包含来自50个动物类的30475幅图片,带有85个属性。
关于准确率
论文使用top-1准确率评估如下三个项目:见到过的类别分类 s s s,未见到过的类别分类 u u u,二者的调和平均数 H , H = 2 ( s ∗ u ) ( s + u ) H,H=\frac{2(s∗u)}{(s+u)} H,H=(s+u)2(s∗u)。
- Top-1 Accuracy:假设ImageNet有1000个分类,模型预测某张图片时,会给出1000个按概率从高到低的类别排名,Top-1 Accuracy是指排名第一的类别与实际结果相符的准确率。
- 调和平均数: H n = 1 1 n ∑ i = 1 n 1 x i = n ∑ i = 1 n 1 x i H _ { n } = \frac { 1 } { \frac { 1 } { n } \sum _ { i = 1 } ^ { n } \frac { 1 } { x _ { i } } } = \frac { n } { \sum _ { i = 1 } ^ { n } \frac { 1 } { x _ { i } } } Hn=n1∑i=1nxi11=∑i=1nxi1n

- ZSL方面:将f-CLSWGAN模型应用到DEVISE等方法后,性能都有所提升,验证了 f-CLSWGAN能够为unseen class生成有效的视觉特征;其中在算法ALE的基础上得到了the-state-of-the-art的表现。
- GZSL方面:使用 f-CLSWGAN模型后性能提升,验证了该方法的有效性。此外,我们观察到,在使用f-CLSWGAN前,seen class的准确率显著高于unseen class,说明很多图像被错误地判别为seen class。而f-CLSWGAN模型在 s s s和 u u u之间取得了一个平衡,尽管 s s s相比baseline有所下降,但是 s s s有大幅上升,直接导致了 H H H的上升。
- 另外,借助f-CLSWGAN模型,仅使用最简单softmax分类器就已经可以达到很好的效果,甚至部分情况下性能已经超过其他模型,在GZSL上取得了the-state-of-the-art的性能,表明了说明论文提出的方法对于未见过的数据生成非常有效,也说明了基于特征生成的思想在其他任务上也具有泛化能力。
f-xGAN各种变体在ZSL和GZSL任务上的性能

1、在ZSL和GZSL场景下,f-xGAN模型都能够提升性能,在GZSL任务上更是显著提升;
2、文章中最后提出的f-CLSWGAN模型在生成模型中性能最好;
3、即使f-WGAN比f-GMMN表现差(在FLO数据集GSZL方法上),f-CLSWGAN模型也能够借助分类损失达到最佳性能。
不同条件下分析f-xGAN各种变体
稳定性测试:首先分析不同的生成模型拟合seen class的能力。生成seen class的CNN特征,再训练softmax分类器。黑色虚线是在真实图像上的准确率,与之相比,f-GAN模型欠拟合,其他模型性能很好,说明f-xGAN模型训练稳定而且能生成有效的特征。
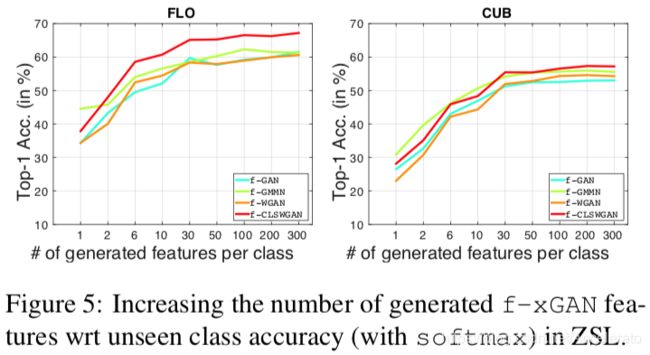
泛化性测试:使用预先训练的模型训练unseen class的cnn特征。再把这些cnn特征和 seen classes的真实CNN特征输入softmax分类器,下图显示了在unseen class中生成特征数量的增加将会显著提高预测准确性。
f-CLSWGAN在不同CNN网络结构下的表现情况

由实验结果可知,ResNet的总体性能要优于GoogleNet;且对于这两种CNN结构,使用f-xGAN模型后性能都有提升,验证了f-xGAN模型适用于不同的CNN结构。
Yongqin Xian, Tobias Lorenz, Bernt Schiele, Zeynep Akata. “Feature Generating Networks for Zero-Shot Learning.” CVPR (2018)
Arjovsky M , Chintala S , Bottou, Léon. Wasserstein GAN[J]. 2017.
https://zhuanlan.zhihu.com/p/25071913
https://youtu.be/3JP-xuBJsyc