STM32——两个模块代码的合并
文章背景:
作为一个STM32的新手小白,在学习并调试完单个模块代码后,接下来遇到的问题必然是如何将多个模块的代码合并到一个工程里。但是网上搜寻了很多资料,都没有对这块内容进行详细的解说。在这里笔者做一个总结,方便其他新手小白在跨过这道坎上能节省一些时间成本。
项目特征:
笔者入门时使用的是正点原子的战舰V3板STM32F103ZET6的教程。正点原子给的代码是用KEIL5文件打开的。所有的实验都整理的非常整齐。他会分为大致五类(USER HARDWARE SYSTEM CORE FWLib)。其中很多代码都是对应STM32F103ZET6芯片的代码源。我们真正要编写的只有USER里的main.c文件以及HARDWARE文件里的各类模块代码源。

以LMT70温度模块为例:
HADEWARE文件里主要都是各类外设模块的代码源。这里以温度传感器LMT70为例。该传感器模块是通过ADC通道来上传热敏电阻阻值的模拟信号。对应的接口为AOUT或AO或OUT。在战舰V3板STM32F103ZET6中ADC通道与GPIO口的对应关系如下表所示。

再看HAREWARE里的adc.c文件:
#include "adc.h"
#include "delay.h"
//初始化ADC
//这里我们仅以规则通道为例
//我们默认将开启通道0~3
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB |RCC_APB2Periph_ADC1 , ENABLE ); //使能ADC1通道时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M
//PA1->PB1 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换由软件而不是外部触发启动
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //使能复位校准
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
// ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
}
//获得ADC值
//ch:通道值 0~3
u16 Get_Adc(u8 ch)
{
//设置指定ADC的规则组通道,一个序列,采样时间
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采样时间为239.5周期
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待转换结束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果
}
u16 Get_Adc_Average(u8 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(ch);
delay_ms(5);
}
return temp_val/times;
}
代码中有adc_init()初始化函数以及相应u16 Get_Adc(u8 ch)数据读取函数以及平均值处理u16 Get_Adc_Average(u8 ch,u8 times)函数。在初始化中。adc_init()初始化函数有如下图所示对GPIO引脚的定义。正点原子中默认为将引脚定义为PA1(对应通道为–通道1)。由于PA1引脚被其他模块占用,我们在这里改为PB1(对应通道为–通道9)

adc_init()初始化函数的其他部分是对ADC1的配置,有兴趣改为ADC2的可以自行尝试。
主函数:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "adc.h"
int main(void)
{
u16 adcx;
float temp;
float tem;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
Adc_Init(); //ADC初始化
while(1)
{
adcx=Get_Adc_Average(ADC_Channel_9,10);
temp=(float)adcx*(3.3/4096)*1000;
tem = (-0.0000084515)*temp*temp+(-0.176928)*temp+204.393-0.5;
printf("\r\nADC电压为:%.2f",tem);
delay_ms(10);
}
}
主函数主要是先对各个变量进行定义。接下来是对延迟函数、优先级、串口、以及ADC通道等进行初始化。最后在while1中对温度数据进行处理与现实。
可以看到代码adcx=Get_Adc_Average(ADC_Channel_9,10);是对通道9的引用,与之间通道9的初始化相互对应。
配置流程:
通过上述的讲解,我们较为清楚的了解代码的结构。接下来详细介绍一下代码的配置流程:
a.先选择相应的芯片代码源(需要在类似魔法棒的地方选择相应的芯片)。

b.对HAREWARE文件进行其他模块代码的放入(本实验放入了源代码adc.c).下图为放入方式:
(1)右击项目的任意文件,选择如下图的Manage Project Items…
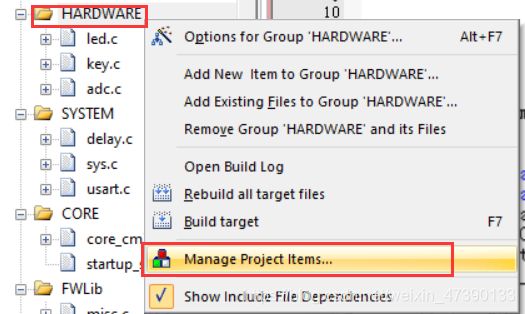
(2)点开后在里面选择HARDWARE文件,在右下角Add Files…中选择对应.c文件放入。

(3)之前的放入仅是将文件简单的导入进项目中,并没有配置文件的路径。我们需对文件路径进行配置:
以下图为例:先点击左上角的魔法棒,在打开的窗口中选择C/C++。在里面找到Include Paths并点击后面的…。在出来的窗口中点击右上角的方框进行文件路径的添加。
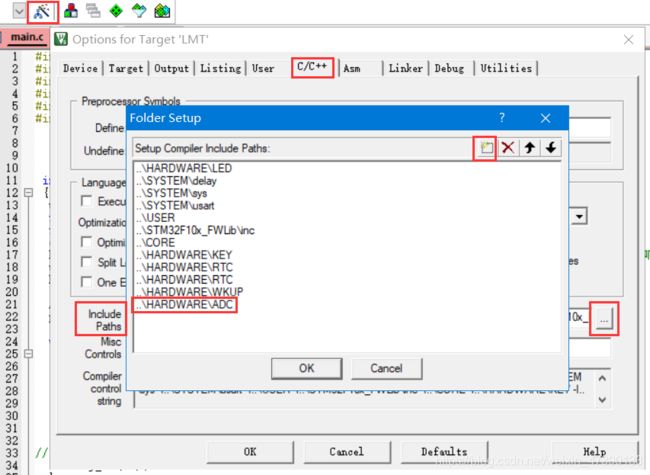
通过以上步骤,我们即可将其他地方的HARDWARE文件导入到该项目中进行编辑。从而为代码的合并打下基础。
合并代码:
接下来是对代码的合并讲解。本文章以陀螺仪传感器IMU901与温度传感器LMT70为例进行合并。下图为两个模块的HARDWARE文件。由于陀螺仪的代码相对温度复杂,若将温度项目导入到陀螺仪项目中,会相对于陀螺仪项目导入到温度项目简单。

a.新建一个文件,将陀螺仪文件重新复制一个到新建文件内。将温度中ADC代码源复制到该文件中的HARDWARE里。

b.打开项目,在目录中将adc.c文件导入

c.魔法棒中导入adc.c文件的路径。与上述路径导入方式相同。接下来点击右上角第二或第三个按键进行项目编译(第二个是对项目简单编译,第三个是对整个项目重新编译)。如下图所示adc.c文件前面会多出来"+"。说明导入成功。

d.主函数合并,如下代码为陀螺仪的主函数:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "usart2.h"
#include "imu901.h"
int main(void)
{
uint32_t times = 0;
uint8_t ch;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置NVIC中断分组2:2位抢占优先级,2位响应优先级
//sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(); /* 延时初始化 */
LED_Init(); /* 初始化LED */
uart_init(115200); /* 串口初始化为115200 */
usart2_init(115200);
imu901_init(); /* IMU901模块初始 */
while (1)
{
if (imu901_uart_receive(&ch, 1)) /*!< 获取串口fifo一个字节 */
{
if (imu901_unpack(ch)) /*!< 解析出有效数据包 */
{
if (rxPacket.startByte2 == UP_BYTE2) /*!< 主动上传的数据包 */
{
atkpParsing(&rxPacket);
}
}
}
else
{
delay_ms(1);
times++;
//if (times % 300 == 0) printf("loading...."); /* 提示系统正在运行 */
if (times % 1000 == 0) /*!< 1秒打印一次数据 */
{
printf("\r\n");
printf("姿态角[XYZ]: %-6.1f %-6.1f %-6.1f (°)\r\n", attitude.roll, attitude.pitch, attitude.yaw);
printf("加速度[XYZ]: %-6.3f %-6.3f %-6.3f (g)\r\n", gyroAccData.faccG[0], gyroAccData.faccG[1], gyroAccData.faccG[2]);
printf("角速度[XYZ]: %-6.1f %-6.1f %-6.1f (°/s)\r\n", gyroAccData.fgyroD[0], gyroAccData.fgyroD[1], gyroAccData.fgyroD[2]);
}
}
}
}
和并之后的主函数:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "usart2.h"
#include "imu901.h"
#include "adc.h"
int main(void)
{
u16 adcx;
float temp;
float tem;
uint32_t times = 0;
uint8_t ch;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置NVIC中断分组2:2位抢占优先级,2位响应优先级
//sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(); /* 延时初始化 */
LED_Init(); /* 初始化LED */
uart_init(115200); /* 串口初始化为115200 */
usart2_init(115200);
imu901_init(); /* IMU901模块初始 */
Adc_Init(); //ADC初始
while (1)
{
if (imu901_uart_receive(&ch, 1)) /*!< 获取串口fifo一个字节 */
{
if (imu901_unpack(ch)) /*!< 解析出有效数据包 */
{
if (rxPacket.startByte2 == UP_BYTE2) /*!< 主动上传的数据包 */
{
atkpParsing(&rxPacket);
}
}
}
else
{
delay_ms(1);
times++;
//if (times % 300 == 0) printf("loading...."); /* 提示系统正在运行 */
if (times % 1000 == 0) /*!< 1秒打印一次数据 */
{
printf("\r\n");
printf("姿态角[XYZ]: %-6.1f %-6.1f %-6.1f (°)\r\n", attitude.roll, attitude.pitch, attitude.yaw);
printf("加速度[XYZ]: %-6.3f %-6.3f %-6.3f (g)\r\n", gyroAccData.faccG[0], gyroAccData.faccG[1], gyroAccData.faccG[2]);
printf("角速度[XYZ]: %-6.1f %-6.1f %-6.1f (°/s)\r\n", gyroAccData.fgyroD[0], gyroAccData.fgyroD[1], gyroAccData.fgyroD[2]);
adcx=Get_Adc_Average(ADC_Channel_9,10);
temp=(float)adcx*(3.3/4096)*1000;
tem = (-0.0000084515)*temp*temp+(-0.176928)*temp+204.393-0.5;
printf("\r\nADC电压为:%.2f",tem);
}
}
}
}
最终烧录代码后通过xcom数据调试成功
总结:
其实只要深刻了解了项目文件的各个部分的作用,合并起来还是非常容易的。就是对源文件进行扩充与路径配置,最后在主函数比较合理的罗列出来即可。
但是各个代码也有各个代码自身的问题。可能在合并中会遇到各种奇怪的问题。像我这个陀螺仪在前面数据接收部分写上printf(“1”);整个xcom就都是1。数据也出不来。但是注释掉之后数据也能正常显示,不过进过调整之后最终数据还是能正常显示出来。
最后:
希望本博客能在STM32单片机上给读者一定的帮助,省下找各种合并代码方案的时间成本。感谢各位观看,如有不足,欢迎在评论内留言与讨论。如果觉得写得好的,可以给我点赞+收藏+关注哦,再次感谢各位!
