遥感影像中常用的目标检测数据集
遥感影像中常用的目标检测数据集
- 1.DOTA
- 2.UCAS-AOD
- 3. NWPU VHR-10
- 4. RSOD-Dataset
- 5. TGRS-HRRSD-Dataset
- 6. TAS
- 7. DIOR
- 8. xView
- 9. HRSC2016
- 10.VEDAI
- 11.Cars Overhead With Context(COWC)
- 12.ITCVD
- 13.OpenSARShip
- 14.DLR 3K Vehicle
- 15.SZTAKI‐INRIA
- 16.LEVIR
- 17.SSDD
- 18.SSDD+
- 19.AIR-SARShip-1.0
- 20.SAR-ship-Dataset
- 21.HRSID
- 22.MSTAR
- 23.VisDrone2019-DET
- 24.MASATI
- 25.airbus-ship-detection
- 26.CARPK
- 27.MAFAT Challenge
- 28.OIRDS
- 29.Bridge Dataset
- 30.Functional Map of the World Challenge
- 31.rscup
- 32.CrowdAI Mapping Challenge
- -------------2021年02月02日更新-----------------------
- 33.UAVDAT
- 34.航拍着火点
- 35.航拍杨梅树
- 36.多类型飞机检测(WH)
搜集整理了遥感中常用的目标检测数据集,方便自己也方便大家用。
1.DOTA
A Large-scale Dataset for Object Detection in Aerial Images。2806张遥感图像(大小约4000*4000),188,282个instances,分为15个类别:飞机、船只、储蓄罐、棒球场、网球场、篮球场、田径场、海港、桥、大型车辆、小型车辆、直升飞机、英式足球场、环形路线、游泳池。每个实例都由一个四边形边界框标注,顶点按顺时针顺序排列。。
更新:DOTA-v1.5在16个类别中包含40万个带注释的对象实例,这是DOTA-v1.0的更新版本。 它们都使用相同的航拍图像,但是DOTA-v1.5修改并更新了对象的注释,其中在DOTA-v1.0中缺少了许多大约10个像素以下的小对象实例,并对其进行了附加注释。 DOTA-v1.5的类别也得到了扩展。 具体地,增加了集装箱起重机的类别。
链接:https://captain-whu.github.io/DOAI2019/dataset.html
网盘:https://pan.baidu.com/s/1CeKtwysA01-wJpBl8RYNQg
提取码:RSAI

2.UCAS-AOD
Dataset of Object Detection in Aerial Images,国科大模式识别实验室标注的,只包含两类目标:汽车,飞机,以及背景负样本。
链接:http://www.ucassdl.cn/resource.asp
链接:https://pan.baidu.com/s/1zVk-sZYOd0YWdhezUFdtdg
提取码:RSAI


3. NWPU VHR-10
西北工业大学标注的航天遥感目标检测数据集,共有800张图像,其中包含目标的650张,背景图像150张,目标包括:飞机、舰船、油罐、棒球场、网球场、篮球场、田径场、港口、桥梁、车辆10个类别。开放下载,大概73M。
链接:http://jiong.tea.ac.cn/people/JunweiHan/NWPUVHR10dataset.html(失效)
链接:https://pan.baidu.com/s/1_tkTVEIW5zfR1jZ33P_fXg
提取码:RSAI.DOTA
4. RSOD-Dataset
武汉大学团队标注,包含飞机、操场、立交桥、 油桶四类目标,数目分别为:
飞机:4993 aircrafts in 446 images.
操场:191 playgrounds in 189 images.
立交桥:180 overpass in 176 overpass.
油桶:1586 oiltanks in 165 images.
链接:https://github.com/RSIA-LIESMARS-WHU/RSOD-Dataset-
链接:https://pan.baidu.com/s/1kTUwBK2LCF2bKxieNuLQPw
提取码:RSAI
5. TGRS-HRRSD-Dataset
HRRSD是中国科学院西安光学精密机械研究所光学影像分析与学习中心制作用于研究高分辨率遥感图像目标检测的数据集。
链接:https://github.com/CrazyStoneonRoad/TGRS-HRRSD-Dataset
链接:https://pan.baidu.com/s/11OhYOZ2SrBc_lKY5LR_8gw
提取码:RSAI
6. TAS

链接:http://ai.stanford.edu/~gaheitz/Research/TAS/
链接:https://pan.baidu.com/s/13l-gL-Gm9wNNIDG6mAA_SA
提取码:RSAI
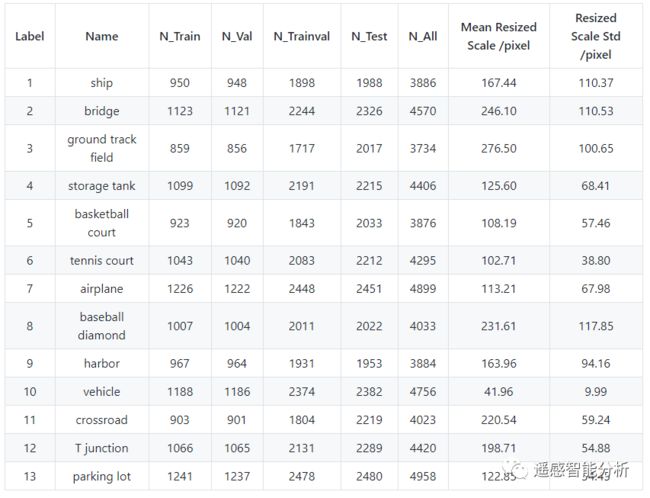
7. DIOR
西工大韩军伟课题组提出了一种用于光学遥感图像中目标检测的大规模基准数据集“DIOR”,由23463幅图像和190288个目标实例组成,并对近年来基于深度学习的目标检测方法进行了综述。目标类别如下图。大小800 * 800,分辨率0.5m到30m。包括不同季节、不同天气。位置增强。来源Google Earth。
文章为:Ke Li, Gang Wan, Gong Cheng, Liqiu Meng, Junwei Han. Object Detection in Optical Remote Sensing Images: A Survey and A New Benchmark.
链接:https://pan.baidu.com/s/1Sxo5rWq7F3sq49mjDqZhtg
提取码:RSAI


8. xView
美国国防部的国防创新部门实验室(DIUx)、DigitalGlobe还有美国国家地理空间情报局的研究人员发布了xView。这是一个数据集和其相关的竞赛,用于评估人工智能方法对高空卫星图像进行分类的能力。xView包含60个类别的100万个不同对象,分布在1,400平方公里的卫星图像上,最大地面样本分辨率为0.3米。该数据集旨在测试图像识别的各个领域,包括:学习效率,细粒度类别检测和多尺度识别等。
7个大类60个小类(None表示无大类),共约1.000,000个目标
-
Fixed-Wing Aircraft
-
small aircraft
-
cargo plane
-
Passenger Vehicle
-
small car
-
bus
-
-
Building
-
hut/tent
-
shed
-
aircraft hangar
-
damaged building
-
facility
-
-
Truck
-
pickup truck
-
utility truck
-
cargo truck
-
truck w/box
-
truck tractor trailer
-
truck w/flatbed
-
truck w/liquid
-
-
Railway Vehicle
-
passenger car
-
cargo car
-
flat car
-
tank car
-
locomotive
-
-
Maritime Vessel
-
motoboat
-
sailboat
-
tugboat
-
barge
-
fishing vessel
-
ferry
-
yacht
-
container ship
-
oil tanker
-
-
Engineering Vessel
-
tower crane
-
container crane
-
reach stacker
-
straddle carrier
-
mobile crane
-
dump truck
-
haul truck
-
scraper/tractor
-
front loader
-
excavator
-
cement mixer
-
ground grader
-
crane truck
-
-
None
-
helipad
-
pylon
-
shipping container
-
shipping container lot
-
storage trank
-
vehicle lot
-
construction site
-
tower structure
-
helicopter
数据集下载链接:https://challenge.xviewdataset.org/download-links
-
论文链接:https://arxiv.org/pdf/1802.07856.pdf
链接:https://pan.baidu.com/s/10zQb06R8KoBLswmfS2jTgw
提取码:RSAI

9. HRSC2016
遥感舰船公开数据集所有图像均来自六个著名的港口。分辨率从2米到0.4米不等,图像大小从300300到1500900不等,大部分比1000*600大。含有3个级别任务(分别为单类class、4类category和19类type舰船检测识别)训练,验证和测试集分别包含436个图像(包括1207个样本),181个图像(包括541个样本)和444个图像(包括1228个样本)。
下载地址:https://sites.google.com/site/hrsc2016/
http://www.escience.cn/people/liuzikun/DataSet.html
链接:https://pan.baidu.com/s/1gzwHD0Q358LNhpKoyiGHqA
提取码:RSAI
3大类27小类,共2,976个目标
-
aircraft carrier
-
Nimitz class aircraft carrier
-
Enterprise class aircraft carrier
-
Kitty Hawk class aircraft carrier
-
Admiral Kuznetsov aircraft carrier
-
Ford-class aircraft carriers
-
Midway-class aircraft carrier
-
Invincible-class aircraft carrier
-
-
warcraft
-
Arleigh Burke class destroyers
-
WhidbeyIsland class landing craft
-
Perry class frigate
-
Sanantonio class amphibious transport dock
-
Ticonderoga class cruiser
-
Abukuma-class destroyer escort
-
Austen class amphibious transport dock
-
Tarawa-class amphibious assault ship
-
USS Blue Ridge (LCC-19)
-
Command ship A
-
Warcraft A
-
Medical ship
-
-
merchant ship
-
Container ship
-
Car carrier A
-
Hovercraft
-
yacht
-
Container ship A
-
Cruise ship
-
Car carrier B
-
-
Submarine

10.VEDAI
VEDAI是一个用于航空图像车辆检测的数据集,可作为基准测试无约束环境下自动目标识别算法的工具。数据库中包含的车辆,除了体积小,还表现出不同的变化,如多方向、灯光/阴影变化、反射或闭塞。此外,每幅图像都有几个光谱波段和分辨率。同时给出了一套精确的实验方案,保证了不同人的实验结果能够得到正确的再现和比较。我们还给出了一些基线算法在该数据集上的性能,这些算法的不同设置,以说明任务的困难,并提供基线比较。
9类,共3640个目标
- plane
- boat
- camping car
- car
- pick-up
- tractor
- truk
- van
- other
下载地址:https://downloads.greyc.fr/vedai/
论文链接:https://downloads.greyc.fr/vedai/
链接:https://pan.baidu.com/s/1DPVD9au5t-l3za4kG9t2ug
提取码:RSAI
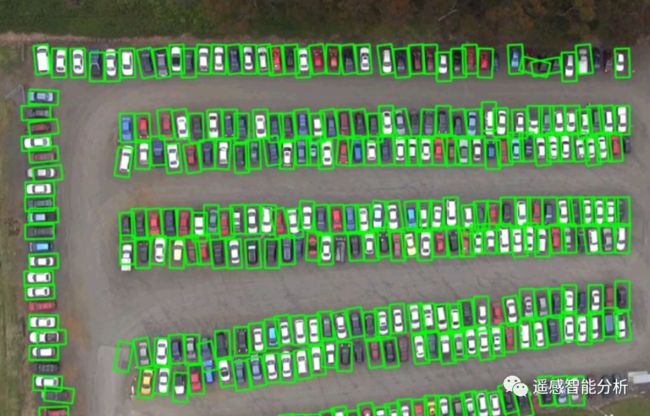
11.Cars Overhead With Context(COWC)
Cars Overhead With Context (COWC) 数据集是一个大型的、来自架空的带注释的汽车集。这对训练一个像深度网络这样的设备来学习检测和/或计数汽车。
数据集具有以下属性:
(1)地面上每像素分辨率为15厘米的高空数据(所有数据均为EO)。
(2)来自六个不同地点的数据:加拿大多伦多,新西兰塞尔温,德国波茨坦和瓦伊辛根,美国哥伦布和犹他州。
(3)32716辆有独特注释的车。58247个独特的反面例子。
(4)故意选取硬性反面例子。
(5)建立检测计数任务基线。
(6)验证后使用的额外测试场景。
下载地址:https://gdo152.llnl.gov/cowc/
Poster Paper
Github: https://github.com/LLNL/cowc

12.ITCVD
这些图像是从一个飞机平台上拍摄的,该平台在荷兰恩斯赫德上空飞行 (sragboomen Peeters,2017)。这些图像是在最低点视图和倾斜视图中拍摄的。斜视的倾斜角度为45度。Thenadir图像的地面采样距离 (GSD) 为10cm。135imageswth 23543辆车辆用于训练,其余38幅图像5545辆用于测试。使用boundingbox手动注释数据集中的每个车辆,该boundingbox表示为 (x,y,w,h)其中 (x,y) 是盒子左上方角落的配合物,以及 (w,h) 分别为是盒子的相对宽度和高度。
下载地址:https://eostore.itc.utwente.nl:5001/fsdownload/zZYfgbB2X/ITCVD
链接:https://pan.baidu.com/s/14ucuCdG5EQYAOSelWXYyhA
提取码:RSAI

13.OpenSARShip
OpenSAR是由上海交通大学高级传感技术中心(AST)开发的开放式SAR图像管理和处理平台,用于SAR图像的读取,处理,可视化和算法测试。SAR图像管理和算法测试是OpenSAR的主要任务。
OpenSAR支持导入各种SAR数据源,例如TerraSAR-X,RADARSAT 1/2,COSMO-SkyMed等。用户可以通过该平台搜索和查看SAR图像数据。OpenSAR支持注册各种算法,例如图像去噪,场景分类,目标检测,目标识别,变化检测等。用户可以通过该平台搜索,配置和执行这些算法,并且完整的测试报告也将提供给用户。
下载地址:http://opensar.sjtu.edu.cn/

14.DLR 3K Vehicle
DLR 3K车辆:DLR 3K车辆数据集(Liu and Mattyus, 2015)是另一个设计用于车辆检测的数据集。它包含20张5616 3744航拍图像,空间分辨率为13厘米。它们是在距地面1000米的高空使用DLR 3K摄像机系统(一种近乎实时的机载数字监控系统)在德国慕尼黑地区拍摄的。有14235辆车是通过在图片中使用定向包围框手动标记的。
链接: https://www.dlr.de/eoc/en/desktopdefault.aspx/tabid-12760/22294_read-52777
链接:https://pan.baidu.com/s/1xH12NLMZtxPTlyVvzSb_Xg
提取码:RSAI
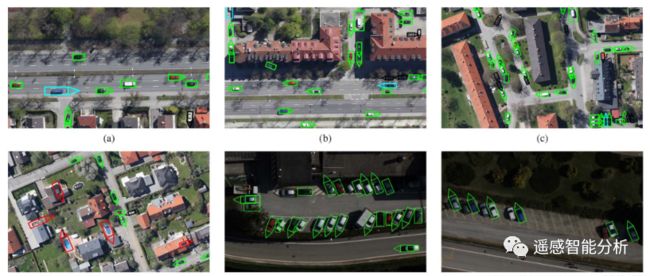
15.SZTAKI‐INRIA
SZTAKI INRIA: SZTAKI INRIA数据集(Benedek et al., 2011)用于基准测试各种建筑8检测方法。它由665个建筑组成,用定向边界框手工标注,分布在来自曼彻斯特(英国)、Szada和布达佩斯(匈牙利)、Cot d Azur和诺曼底(法国)和Bodensee(德国)的9幅遥感图像中。所有的图像只包含红色®、绿色(G)和蓝色(B)三个通道。其中,两幅图像(Szada和Budapest)是航空图像,其余七幅图像是来自QuickBird、IKONOS和谷歌Earth的卫星图像。
链接:http://web.eee.sztaki.hu/remotesensing/building_benchmark.html
16.LEVIR
LEVIR数据集由大量 800 × 600 像素和0.2m〜1.0m /像素的高分辨率Google Earth图像和超过22k的图像组成。LEVIR数据集涵盖了人类居住环境的大多数类型地面特征,例如城市,乡村,山区和海洋。数据集中未考虑冰川,沙漠和戈壁等极端陆地环境。数据集中有3种目标类型:飞机,轮船(包括近海轮船和向海轮船)和油罐。所有图像总共标记了11k个独立边界框,包括4,724架飞机,3,025艘船和3,279个油罐。每个图像的平均目标数量为0.5。
数据下载地址:http://levir.buaa.edu.cn/Code.htm
数据论文地址:Random Access Memories: A New Paradigm for Target Detection in High Resolution Aerial Remote Sensing Images
链接:https://pan.baidu.com/s/1hVx74Q4waNRKsC6yEhrHoQ
提取码:RSAI

17.SSDD
在数据集SSDD中,一共有1160个图像和2456个舰船,平均每个图像有2.12个舰船,数据集后续会继续扩充。相比于具有20类目标的PASCAL VOC数据集,SSDD虽然图片少,但是类别只有舰船这一种,因此它足以训练检测模型。
链接: https://zhuanlan.zhihu.com/p/58404659
链接:https://pan.baidu.com/s/1b4O9F4ErTXmzrv4K0p8KOA
提取码:RSAI

18.SSDD+
SSDD+的数据集相对于SSDD数据将垂直边框变成了旋转边框,旋转边框可在完成检测任务的同时实现了对目标的方向估计。
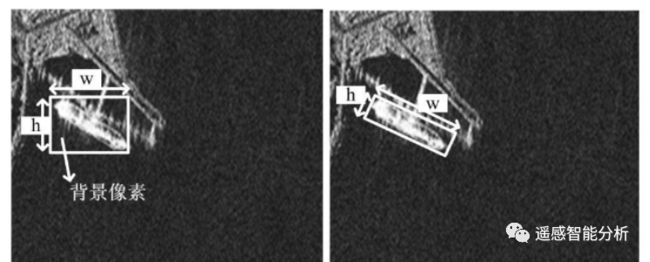
19.AIR-SARShip-1.0
高分辨率SAR舰船检测数据集-1.0(AIR-SARShip-1.0)首批发布31幅图像,图像分辨率包括1m和3m,成像模式包括聚束式和条带式,极化方式为单极化,场景类型包含港口、岛礁、不同等级海况的海面,目标覆盖运输船、油船、渔船等十余类近千艘舰船。图像尺寸约为3000×3000像素,图像格式为Tiff、单通道、8/16位图像深度,标注文件提供相应图像的长宽尺寸、标注目标的类别以及标注矩形框的位置。
下载地址:AIR-SARShip-1.0:高分辨率SAR舰船检测数据集
参考文献:http://radars.ie.ac.cn/article/doi/10.12000/JR19097?viewType=HTML
链接:http://opensar.sjtu.edu.cn/
链接:https://pan.baidu.com/s/1368GpoHXVKpZUV6ChxAdrQ
提取码:RSAI
20.SAR-ship-Dataset
该数据集以我国国产高分三号SAR数据和Sentinel-1 SAR数据为主数据源,共采用了102景高分三号和108景Sentinel-1 SAR图像构建高分辨率SAR船舶目标深度学习样本库。目前,该深度学习样本库包含43819船舶切片。高分三号的成像模式是Strip-Map (UFS)、Fine Strip-Map 1 (FSI)、Full Polarization 1 (QPSI)、Full Polarization 2(QPSII)和Fine Strip-Map 2 (FSII)。这5种成像模型的分辨率分别是3m、5m、8m、25m和10m。Sentinel-1的成像模式是条带模式(S3和S6)和宽幅成像模式。
下载链接:https://github.com/CAESAR-Radi/SAR-Ship-Dataset
参考文献:A SAR Dataset of Ship Detection for Deep Learningunder Complex Backgrounds
链接:https://pan.baidu.com/s/1AC0NMouOJ1bOnubL_JCkHw
提取码:RSAI
21.HRSID
该数据集是电子科技大学的苏浩在2020年1月发布数据集,HRSID是高分辨率sar图像中用于船舶检测、语义分割和实例分割任务的数据集。该数据集共包含5604张高分辨率SAR图像和16951个ship实例。ISSID数据集借鉴了Microsoft Common Objects in Context (COCO)数据集的构建过程,包括不同分辨率的SAR图像、极化、海况、海域和沿海港口。该数据集是研究人员评估其方法的基准。对于HRSID, SAR图像的分辨率分别为:0.5m, 1 m, 3 m。
下载链接:https://github.com/chaozhong2010/HRSID
链接:https://pan.baidu.com/s/1H0BYLh_av_9TyR3YIoRjjQ
提取码:RSAI
22.MSTAR
MSTAR数据库作为SAR图像自动目标识别(SAR ATR)研究的一个通用库,被很多学者广泛采用。从现有的SAR ATR系统处理流程来看,目标检测作为该系统的前端,很大程度上影响系统后续识别性能,在较好的检测性能下获得的目标区域可以直接进行分类识别,避免了鉴别阶段进一步减少虚警目标。目标识别作为该系统的后端处理部分,是整个系统的重点也是难点。
下载地址:
链接:https://pan.baidu.com/s/1wmDws19NbjqOyy3HwLpUUg
提取码:RSAI

23.VisDrone2019-DET
10 类,共54200个目标
-
prdestrian
-
People
-
Bicycle
-
Car
-
Van
-
Truck
-
Tricycle
-
Awning-tricycle
-
Bus
-
Motor
-
Others

24.MASATI
2大类7小类
下载地址:https://www.iuii.ua.es/datasets/masati/
链接:https://pan.baidu.com/s/1CZlKbpAwfijVpeo0FJERlQ
提取码:RSAI
-
ship
-
ship
-
detail
-
multi
-
cosat&ship
-
-
non-ship
-
sea
-
coast
-
land
-
25.airbus-ship-detection
从卫星图片中找到所有的船只
下载地址:https://www.kaggle.com/c/airbus-ship-detection
链接:https://pan.baidu.com/s/1hma2irpBFq__fD-i_WiaPg
提取码:RSAI

26.CARPK
下载地址:https://lafi.github.io/LPN/
链接:https://pan.baidu.com/s/1joNZF0s4TJTBlrynL90WFA
提取码:RSAI

27.MAFAT Challenge
目标是对航空影像数据中发现的不同对象进行分类。该分类包括主要类别的粗粒度分类(例如,大型车辆)和子类别和独特特征的精细粒度分类(例如,具有天窗的汽车)。
数据集包括从不同地理位置,不同时间,分辨率,区域覆盖范围和图像采集条件(天气,太阳方向,相机方向等)拍摄的航空影像。图像分辨率在5cm至15cm GSD(地面采样距离)之间变化。
- 小型车
子类-轿车,掀背车,小型货车,货车,皮卡车,吉普车,公共车辆。
特征-天窗,行李架,开放式货运区域,封闭式驾驶室,撞毁,备用轮胎。
颜色-黄色,红色,蓝色,黑色,银色/灰色,白色,其他。
- 大型车辆
子类-卡车,轻型卡车,水泥搅拌车,专用农用车,起重机,原动机,油轮,公共汽车,小巴。
特点-敞开的货物区域,交流通风口,撞毁的,封闭的箱子,封闭的驾驶室,梯子,平板车,软壳箱,利用推车固定。
颜色-黄色,红色,蓝色,黑色,银色/灰色,白色,其他。
链接:https://competitions.codalab.org/competitions/19854
28.OIRDS
5类,共1800个目标
-
car
-
pick-up
-
truck
-
van
-
unknown
链接: https://sourceforge.net/projects/oirds/
链接:https://pan.baidu.com/s/1AmUM7RXtSzcgfiJf1J-5Ug
提取码:RSAI
29.Bridge Dataset
该数据集由500个图像组成,每个图像至少包含一个桥。此数据集具有从世界不同地区收集的样本,由于图像和桥梁的属性(例如建筑的方向,景观背景(河流或山脉),区域(城市或乡村), 等等所有图像均具有4,800×2,843像素,并由我们的团队手动注释。 首先根据OpenStreetMap(可公开使用的注释映射框架)选择桥梁,然后从Google Earth导出。
下载地址:http://www.patreo.dcc.ufmg.br/2019/07/10/bridge-dataset/
链接:https://pan.baidu.com/s/12qro1i_NzJKVSqptJn7p6Q
提取码:RSAI
30.Functional Map of the World Challenge
功能性世界地图(fMoW),目的是促进机器学习模型发展,使其能够从卫星的时序影像和一组丰富的元数据特征中预测出建筑物作用和土地利用。在对影像中对象进行预测时,每张影像的元数据可支持位置、时间,太阳角度、物理尺寸等特性的推理。数据集包含来自超过200个国家的100万张影像,每张影像至少有一个包围盒注释,其属于包含“误检测”类的63个类别之一。
下载地址:https://www.iarpa.gov/challenges/fmow.html
https://github.com/fMoW/dataset

31.rscup
遥感图像目标检测识别竞赛即利用算法模型对遥感图像中的一个或多个目标的类别和位置进行自动化判定与识别。本项竞赛以包含典型地物目标的遥感图像为处理对象,参赛队伍使用主办方提供的图像进行带方向的目标检测与识别处理,主办方依据评分标准对检测识别结果进行综合评价。遥感图像目标检测识别竞赛即利用算法模型对遥感图像中的一个或多个目标的类别和位置进行自动化判定与识别。本项竞赛以包含典型地物目标的遥感图像为处理对象,参赛队伍使用主办方提供的图像进行带方向的目标检测与识别处理,主办方依据评分标准对检测识别结果进行综合评价。
下载地址:http://rscup.bjxintong.com.cn/#/theme/2
链接:https://pan.baidu.com/s/10wCm7X_gz71FIBcehHdkmQ
提取码:RSAI

32.CrowdAI Mapping Challenge
链接:https://www.crowdai.org/challenges/mapping-challenge;
https://www.jianshu.com/p/90efc39975da
下载地址:
链接:https://pan.baidu.com/s/1Pzb5IWUYhZl54prk_gX65A
提取码:RSAI

-------------2021年02月02日更新-----------------------
33.UAVDAT
UAVDT是ICCV2018提出的一个数据集,共包含80000帧图片,不仅可以用于目标跟踪,也可以用于目标检测等。
链接:https://sites.google.com/site/daviddo0323/projects/uavdt
链接:https://pan.baidu.com/s/1XNmZjxdK6KYhMugmpjY6-Q
提取码:RSAI

34.航拍着火点
该数据集是由无人机在亚利桑那州松树林的规定燃烧堆积杂物期间收集的火灾图像数据集。该数据集包括红外相机拍摄的视频记录和热图。捕获的视频和图像按帧标注,可以帮助研究人员轻松建立模型。


论文:https://arxiv.org/pdf/2012.14036v1.pdf
代码:https://github.com/AlirezaShamsoshoara/Fire-Detection-UAV-Aerial-Image-Classification-Segmentation-UnmannedAerialVehicle
链接:https://pan.baidu.com/s/1oGXKrJyRZXSjaLP35KYgJw
提取码:RSAI
35.航拍杨梅树
杨梅树[Myrica rubra (Lour.) S. et Zucc]是一种常绿乔木,树高5-15 m,胸径可达60 cm,树冠可达5 m以上。杨梅树广泛分布在我国江南地区,生长于海拔1500 m以下酸性红壤、山坡向阳的地理环境中。杨梅果是具有江南地理特色的水果。作者于2019年1月23日-24日选择浙江省永嘉县大洋山森林公园作为试验区,采用大疆Phantom4无人机进行航拍,在此基础上对杨梅树树冠进行多边形标记,即采用Mask RCNN(Region Convolutional Neural Networks)深度学习模型对杨梅树进行自动识别,对识别结果运用目视解译方法验证。结果表明,Mask RCNN在杨梅树识别方面有较高精度,总体检出率达90.08%,错检率为9.62%,漏检率为9.92%。杨梅树识别深度学习模型实验数据集包括:(1)杨梅树实验样区(浙江省永嘉县大洋山森林公园) 照片3080张,每张照片像素尺寸为5472 x 3648;(2)杨梅树树冠样本标记数据(298张);(3)杨梅树深度学习模型识别结果数据。该数据集以.jpg、.json格式存储,由3690个数据文件组成,数据量为25.6 GB(压缩为71个文件,25.5 GB)。

链接:http://www.geodoi.ac.cn/doi.aspx?Id=1269
链接:https://pan.baidu.com/s/1OHDJlD7dnrjTO2TRByeTGg
提取码:RSAI
36.多类型飞机检测(WH)
谷歌地图标注的30多类飞机类型包括[‘c17’, ‘c5’, ‘helicopter’, ‘c130’, ‘f16’, ‘b2’, ‘other’, ‘b52’, ‘kc10’, ‘command’, ‘f15’, ‘kc135’, ‘a10’, ‘b1’, ‘aew’, ‘f22’, ‘p3’, ‘p8’, ‘f35’, ‘f18’, ‘v22’, ‘f4’, ‘globalhawk’, ‘u2’, ‘su-27’, ‘il-38’, ‘tu-134’, ‘su-33’, ‘an-70’, ‘su-24’, ‘tu-22’, ‘il-76’]
链接:https://wanghao.blog.csdn.net/