蓝桥杯嵌入式第八届决赛-频率控制器
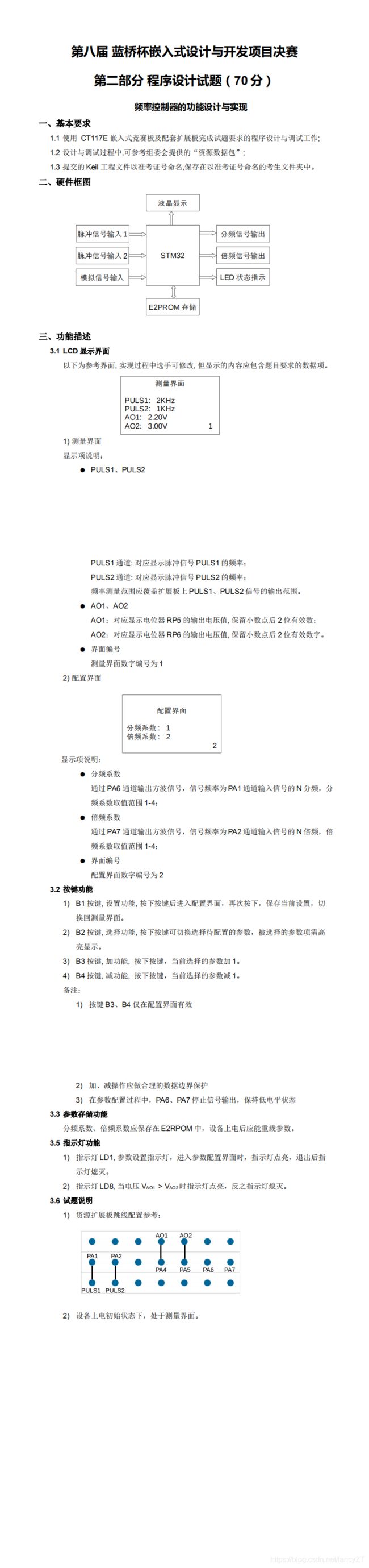
一、题目
二、代码
1.初始化
tx.c
#include "tx.h"
void LED_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = 0xff00;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIOD->ODR|=(1<<2);
GPIOC->ODR|=0xff00;
GPIOD->ODR&=~(1<<2);
}
void KEY_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
u8 key_status[4]={
1,1,1,1};
void KEY_Driver(void){
u8 i;
static u8 backup[4]={
1,1,1,1};
for(i=0;i<4;i++){
if(backup[i]!=key_status[i]){
if(backup[i]!=0){
Key_action(i+1);
}
backup[i]=key_status[i];
}
}
}
void KEY_Scan(void){
u8 i;
static u8 key_buf[4]={
0xff,0xff,0xff,0xff};
key_buf[0]=(key_buf[0]<<1)|KEY1;
key_buf[1]=(key_buf[1]<<1)|KEY2;
key_buf[2]=(key_buf[2]<<1)|KEY3;
key_buf[3]=(key_buf[3]<<1)|KEY4;
for(i=0;i<4;i++){
if(key_buf[i]==0x00)
key_status[i]=0;
else if(key_buf[i]==0xff)
key_status[i]=1;
}
}
void Tim4_Init(u16 arr,u16 psc){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr-1;
TIM_TimeBaseStructure.TIM_Prescaler = psc-1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM4,TIM_IT_Update, ENABLE);
/* TIM2 enable counter */
TIM_Cmd(TIM4, ENABLE);
}
//PA6 PA7
u32 CH1_val;
u32 CH1_duty;
u32 CH2_val;
u32 CH2_duty;
void PWM_out(u32 fre1,u16 fre2,u8 en1,u8 en2){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
CH1_val=1000000/fre1;
CH1_duty=CH1_val*50/100;
CH2_val=1000000/fre2;
CH2_duty=CH2_val*50/100;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
if(en1)
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
else
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_Pulse = CH1_val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
if(en2)
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
else
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_Pulse = CH2_val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_ITConfig(TIM3, TIM_IT_CC1 | TIM_IT_CC2, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
//PA1 PA2
void PWM_in(void){
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_3;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_Cmd(TIM2, ENABLE);
/* Enable the CC2 Interrupt Request */
TIM_ITConfig(TIM2, TIM_IT_CC2|TIM_IT_CC3, ENABLE);
}
void Adc1_Init(void){
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 2;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE);
/* Enable ADC1 reset calibration register */
ADC_ResetCalibration(ADC1);
/* Check the end of ADC1 reset calibration register */
while(ADC_GetResetCalibrationStatus(ADC1));
/* Start ADC1 calibration */
ADC_StartCalibration(ADC1);
/* Check the end of ADC1 calibration */
while(ADC_GetCalibrationStatus(ADC1));
}
u16 Get_adc(u8 channel){
u16 temp;
ADC_RegularChannelConfig(ADC1, channel, 1, ADC_SampleTime_239Cycles5);
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)==0);
temp=ADC_GetConversionValue(ADC1);
ADC_SoftwareStartConvCmd(ADC1, DISABLE);
return temp;
}
tx.h
/*
程序说明: CT117E嵌入式竞赛板LCD驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT117E嵌入式竞赛板
日 期: 2011-8-9
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __TX_H
#define __TX_H
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
/* Exported types ------------------------------------------------------------*/
/* Exported constants --------------------------------------------------------*/
/* LCD Registers */
#define KEY1 GPIO_ReadInputDataBit( GPIOA, GPIO_Pin_0)
#define KEY2 GPIO_ReadInputDataBit( GPIOA, GPIO_Pin_8)
#define KEY3 GPIO_ReadInputDataBit( GPIOB, GPIO_Pin_1)
#define KEY4 GPIO_ReadInputDataBit( GPIOB, GPIO_Pin_2)
void LED_Init(void);
void KEY_Init(void);
void KEY_Driver(void);
void KEY_Scan(void);
void Tim4_Init(u16 arr,u16 psc);
void PWM_out(u32 fre1,u16 fre2,u8 en1,u8 en2);
void PWM_in(void);
void Adc1_Init(void);
u16 Get_adc(u8 channel);
extern void Key_action(int code);
#endif /* __TX_H */
/******************* (C) COPYRIGHT 2008 STMicroelectronics *****END OF FILE****/
i2c.c追加
void i2c_write(u16 add,u8 data){
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CSendByte(data);
I2CWaitAck();
I2CStop();
}
u8 i2c_read(u16 add){
u8 temp;
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
temp=I2CReceiveByte();
I2CSendAck();
I2CStop();
return temp;
}
2.中断
stm32f10x_it.h
extern u8 ms200_flag;
void TIM4_IRQHandler(void)
{
static u8 ms200_count=0;
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
KEY_Scan();
ms200_count++;
if(ms200_count>=100){
ms200_count=0;
ms200_flag=1;
}
}
}
extern u32 CH1_val;
extern u32 CH1_duty;
extern u32 CH2_val;
extern u32 CH2_duty;
void TIM3_IRQHandler(void)
{
u16 capture1,capture2;
static u8 flag1=0;
static u8 flag2=0;
if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1);
capture1 = TIM_GetCapture1(TIM3);
if(flag1)
TIM_SetCompare1(TIM3, capture1 + CH1_duty);
else
TIM_SetCompare1(TIM3, capture1 + CH1_val-CH1_duty);
flag1^=1;
}
else if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
capture2 = TIM_GetCapture2(TIM3);
if(flag2)
TIM_SetCompare2(TIM3, capture2 + CH2_duty);
else
TIM_SetCompare2(TIM3, capture2 + CH2_val-CH2_duty);
flag2^=1;
}
}
__IO uint16_t IC3ReadValue1 = 0, IC3ReadValue2 = 0;
__IO uint16_t CaptureNumber = 0;
__IO uint32_t Capture = 0;
__IO uint32_t TIM3Freq = 0;
__IO uint16_t IC3ReadValue1_2 = 0, IC3ReadValue2_2 = 0;
__IO uint16_t CaptureNumber_2 = 0;
__IO uint32_t Capture_2 = 0;
__IO uint32_t TIM3Freq_2 = 0;
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_CC2) == SET)
{
/* Clear TIM3 Capture compare interrupt pending bit */
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
if(CaptureNumber == 0)
{
/* Get the Input Capture value */
IC3ReadValue1 = TIM_GetCapture2(TIM2);
CaptureNumber = 1;
}
else if(CaptureNumber == 1)
{
/* Get the Input Capture value */
IC3ReadValue2 = TIM_GetCapture2(TIM2);
/* Capture computation */
if (IC3ReadValue2 > IC3ReadValue1)
{
Capture = (IC3ReadValue2 - IC3ReadValue1);
}
else
{
Capture = ((0xFFFF - IC3ReadValue1) + IC3ReadValue2);
}
/* Frequency computation */
TIM3Freq = 1000000/ Capture;
CaptureNumber = 0;
}
}
else if(TIM_GetITStatus(TIM2, TIM_IT_CC3) == SET)
{
/* Clear TIM3 Capture compare interrupt pending bit */
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
if(CaptureNumber_2 == 0)
{
/* Get the Input Capture value */
IC3ReadValue1_2 = TIM_GetCapture3(TIM2);
CaptureNumber_2 = 1;
}
else if(CaptureNumber_2 == 1)
{
/* Get the Input Capture value */
IC3ReadValue2_2 = TIM_GetCapture3(TIM2);
/* Capture computation */
if (IC3ReadValue2_2 > IC3ReadValue1_2)
{
Capture_2 = (IC3ReadValue2_2 - IC3ReadValue1_2);
}
else
{
Capture_2 = ((0xFFFF - IC3ReadValue1_2) + IC3ReadValue2_2);
}
/* Frequency computation */
TIM3Freq_2 = 1000000 / Capture_2;
CaptureNumber_2 = 0;
}
}
}
3.主函数
main.c
#include "stm32f10x.h"
#include "lcd.h"
#include "tx.h"
#include "i2c.h"
#include "stdio.h"
u32 TimingDelay = 0;
extern __IO uint32_t TIM3Freq_2 ; //PLUS1
extern __IO uint32_t TIM3Freq ; //PLUS2
u8 ms200_flag=1;
u8 fre_1=1;
u8 fre_2=1;
u8 mul=1;
u8 div=1;
float ao1;
float ao2;
u8 SET_flag=0;//0-实时,1-配置
u8 Index_flag=0;//0-分频系数,1-倍频系数
u8 str[20];
u16 LED_MODE=0xffff;
u8 LD1_flag=0;
u8 LD2_flag=0;
void Key_action(int code);
void Refresh(void);
void Show_real(void);
void Show_set(void);
void Delay_Ms(u32 nTime);
//Main Body
int main(void)
{
SysTick_Config(SystemCoreClock/1000);
Delay_Ms(200);
STM3210B_LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
LED_Init();
KEY_Init();
Tim4_Init(2000,72);
i2c_init();
PWM_in();
Adc1_Init();
div=i2c_read(0x00); Delay_Ms(5);
mul=i2c_read(0x01); Delay_Ms(5);
while(1){
KEY_Driver();
if(ms200_flag){
ms200_flag=0;
Refresh();
if(SET_flag==0)
Show_real();
else
Show_set();
}
}
}
void Key_action(int code){
if(code==1){
SET_flag^=1;
if(SET_flag==0){
i2c_write(0x00,div);Delay_Ms(5);
i2c_write(0x00,mul);Delay_Ms(5);
}
}
else if(code==2){
if(SET_flag==1)
Index_flag^=1;
}
else if(code==3){
if(SET_flag==1){
if(Index_flag==0){
div++;
if(div>4)
div=4;
}
else if(Index_flag==1){
mul++;
if(mul>4)
mul=4;
}
}
}
else if(code==4){
if(SET_flag==1){
if(Index_flag==0){
div--;
if(div<1)
div=1;
}
else if(Index_flag==1){
mul--;
if(mul<1)
mul=1;
}
}
}
}
void Refresh(void){
ao1=Get_adc(ADC_Channel_4)*3.3/4096;
ao2=Get_adc(ADC_Channel_5)*3.3/4096;
if(ao1>ao2)
LD2_flag=1;
else if(ao1<=ao2)
LD2_flag=0;
fre_1=TIM3Freq/1000;
fre_2=TIM3Freq_2/1000;
if(SET_flag==0){
LD1_flag=0;
PWM_out(fre_1*1000/div,fre_2*1000*1000*mul,1,1);
}
else{
LD1_flag=1;
PWM_out(fre_1*1000/div,fre_2*1000*1000*mul,0,0);
}
if(LD1_flag){
LED_MODE&=~(1<<8);
GPIOC->ODR=LED_MODE;
GPIOD->ODR|=(1<<2);
GPIOD->ODR&=~(1<<2);
}
else{
LED_MODE|=(1<<8);
GPIOC->ODR=LED_MODE;
GPIOD->ODR|=(1<<2);
GPIOD->ODR&=~(1<<2);
}
if(LD2_flag){
LED_MODE&=~(1<<9);
GPIOC->ODR=LED_MODE;
GPIOD->ODR|=(1<<2);
GPIOD->ODR&=~(1<<2);
}
else{
LED_MODE|=(1<<9);
GPIOC->ODR=LED_MODE;
GPIOD->ODR|=(1<<2);
GPIOD->ODR&=~(1<<2);
}
}
void Show_real(void){
sprintf((char*)str," Measure ");
LCD_DisplayStringLine( Line1, str);
sprintf((char*)str," PLUS1:%dkHz ",fre_1);
LCD_DisplayStringLine( Line3, str);
sprintf((char*)str," PLUS2:%dkHz ",fre_2);
LCD_DisplayStringLine( Line5, str);
sprintf((char*)str," AO1:%.2fV ",ao1);
LCD_DisplayStringLine( Line7, str);
sprintf((char*)str," AO2:%.2fV 1 ",ao2);
LCD_DisplayStringLine( Line9, str);
}
void Show_set(void){
sprintf((char*)str," Setting ");
LCD_DisplayStringLine( Line1, str);
sprintf((char*)str," ");
LCD_DisplayStringLine( Line3, str);
sprintf((char*)str," 2 ");
LCD_DisplayStringLine( Line9, str);
if(Index_flag==0)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
sprintf((char*)str," Div-n:%d ",div);
LCD_DisplayStringLine( Line5, str);
LCD_SetTextColor(White);
if(Index_flag==1)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
sprintf((char*)str," Mul-n:%d ",mul);
LCD_DisplayStringLine( Line7, str);
LCD_SetTextColor(White);
}
void Delay_Ms(u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}