SUMO仿真数据输出的配置方法
1.概述
1.1.目的
说明SUMO仿真结束后可以输出的数据及其设置方法。
1.2.参考文档
http://sumo.dlr.de/wiki/Simulation/Output
2.SUMO的输出数据概述
SUMO可以输出的数据概述如下表:
| 数据来源 |
数据内容 |
wiki相关条目 |
| 车辆 |
1.任一时刻、任一车道上的每辆车的位置和车速; |
raw vehicle positions dump |
| 2.任一时刻、任一车辆的坐标、航向、车速和所处的车道及位置; |
full output |
|
| 3.任一时刻、任一车辆的油耗、电耗和CO、NOx等排放数据; |
emission output |
|
| 4.每辆车的出发、结束的时刻和位置以及途经的车道。 |
trip information、 vehicle routes information |
|
| 道路 |
1.指定车道指定时间间隔内的车流密度、占有率、平均车速以及到达、离开的车辆数量; |
edgelane traffic |
| 2.指定车道指定时间间隔内的CO、NOx等排放数据; |
edgelane emissions |
|
| 3.指定车道指定时间间隔内的噪音数据。 |
edgelane noise |
|
| 交通灯 |
指定交通灯的状态及其切换数据 |
traffic light state |
| 虚拟探测器 |
1.指定位置指定时间间隔内通过的车辆数量、流量、平均车速和占有率等数据; |
Instant induction loops, Inductive loop detectors (E1) |
| 2.指定区域指定时间间隔内车辆数量、流量、占有率、拥堵和延误等数据。 |
Lane area detectors (E2), MultiEntryExit detectors (E3) |
3.设置数据输出的方法
3.1.设置数据输出的一般步骤
1)在additional file中配置数据输出参数(某些数据输出时需要此步骤):
例如,设置Induction Loops Detectors (E1)时需要新建.xml文件并在其中输入:
2)在命令行启动sumo时添加相关指令或者在sumocfg文件中配置:
例如,设置Induction Loops Detectors (E1)时,在命令行输入如下语句:
sumo-gui -c Crossing8.sumo.cfg --additional-files E1.xml 或者在sumocfg文件中添加相关语句,如下面additional-files和summary-out两条语句:
3)运行sumo,待仿真结束后查看对应.xml结果文件。
3.2.生成虚拟探测器配置文件additional file的方法
对于虚拟传感器E1、E2和E3需要编辑其配置文件additional file,有三种不同的方法,可以根据需要选用:
1)直接新建并编辑.xml文件
如上一节中所述。
2)通过sumo自带的output工具自动生成配置文件:
运行如下命令,自动生成在交叉口的虚拟探测器的配置文件:
python C:\Sumo\tools\output\generateTLSE1Detectors.py -n Crossing8.net.xml -l 0 -f 100 -o E1Detector.xml其中的generateTLSE1Detectors.py可对应替换为generateTLSE2Detectors.py和generateTLSE3Detectors.py。
各项参数的含义可以通过输出如下命令获得help文件:
python C:\Sumo\tools\output\generateTLSE1Detectors.py -h3)通过图形化的NETEDIT工具配置虚拟探测器位置,并生成配置文件:
a)运行/sumo/bin/netedit.exe,启动netedit工具;
b)通过File-->Open Network打开待配置的net文件;
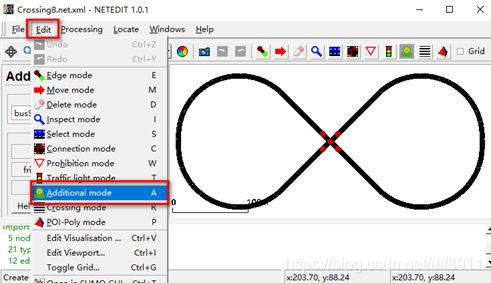
c)通过Edit-->Additional mode,打开附件配置模式,如下图所示:
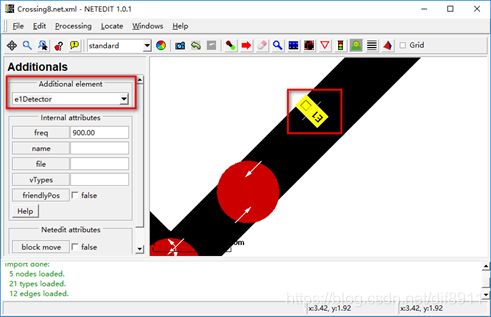
d)在Additional element处选择合适的元素类型,并在右侧窗口点选要配置的位置,如下图所示:
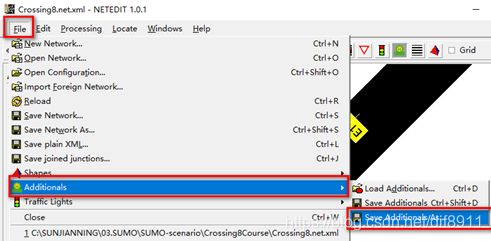
e)通过File-->Additionals-->Save Additionals As,保持生成.xml配置文件。