matlab gui 怎么输出语句到可编辑框里_一知半解|MATLAB机器人建模与仿真控制(1)...
各位机器人技术爱好者们,大家好!很荣幸受古月老师邀请,成为古月居的签约作者。希望在这里可以同大家相互交流与学习。 能力不足,但终于还是硬着头皮开始了在古月居的第一篇博客。由于我是机械专业出身,在接触机器人学时,选择了容易上手的MATLAB软件作为学习机器人学的主要工具。所以,今后分享的内容可能会更偏向使用MATLAB这一工具来演示说明。 不可否认
仿真是机器人学习和研究过程中最重要的工具之一,在学习《机器人学导论》的时候,看得最多的就是一大堆
矩阵变换的数学公式,很难知道这些公式是
如何通过计算机编程实现对机器人的控制,也很难知道推导出来的
机器人正逆运动学公式怎么用。我在MATLAB附加功能中找到一个demo,感觉有助于我们的学习和研究,因此在这里分享下。 这个demo是利用MATLAB环境设计的
GUI(Graphical User Interface)图形用户界面,用于演示机器人正逆运动学简单控制。源码可以在
MATLAB软件中的附加功能中找到。该demo的m源代码不仅能很好的帮助理解机器人正/逆运动学问题,在一定程度上还可以
学习到如何使用m语言编程设计图形用户界面。
![]()
![]()
![]()
![]()
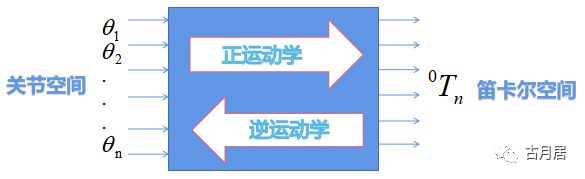
 通过上面的演示,我们知道该GUI的演示内容,对机器人正逆运动学也有了感性的认识:
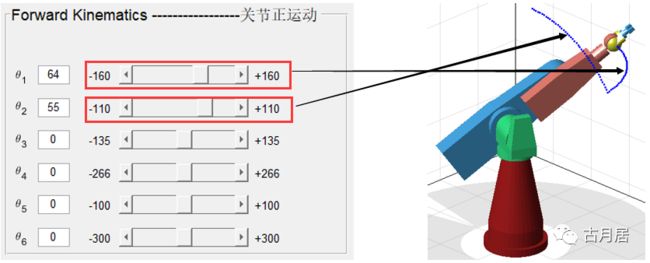
针对串联机器人,正运动学即通过改变机器人的关节角度,得到机器人末端运动后的位姿【笛卡尔空间】;
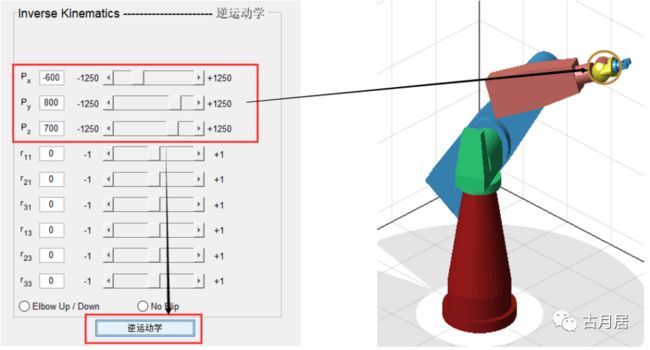
逆运动学即通过设定机器人的末端位姿,以求解机器人各个关节的角度值【关节空间】,以保证机器人通过计算获得的关节角度运动到设定的末端位姿。
通过上面的演示,我们知道该GUI的演示内容,对机器人正逆运动学也有了感性的认识:
针对串联机器人,正运动学即通过改变机器人的关节角度,得到机器人末端运动后的位姿【笛卡尔空间】;
逆运动学即通过设定机器人的末端位姿,以求解机器人各个关节的角度值【关节空间】,以保证机器人通过计算获得的关节角度运动到设定的末端位姿。
![]()
![]()
![]()
![]()
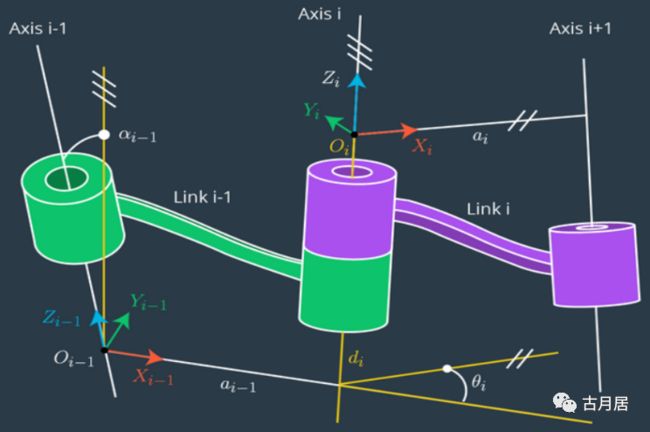
![]() 沿Zi第i关节建立,
沿Zi第i关节建立,
![]() Xi垂直于Zi+1
Xi垂直于Zi+1![]() 并与之相交【下面提到的限制】。 关于DH参数的介绍,在古月居公众号中有一篇文章《干货|机械臂的坐标系与数学模型:传说中的DH参数》,里面提到了DH参数通过
限制原点位置和
X轴的方向,人为减少了两个自由度,因此它只需要用四个参数即可表达关节之间原本是六自由度的坐标变换【三个方向的旋转和三个方向上的平移】。 根据上面的图我们便知道固连在连杆i-1上的坐标系是这样通过四个DH参数变换到固连在连杆i上的坐标系的: ① 固连在连杆i-1上的坐标系 绕Xi-1 轴 旋转αi-1 角度后,使得 新的 坐标系的Z轴与固连在连杆i上的坐标系的Z i 轴平行—> 关节扭角 。 ② 然后将旋转后的坐标系 沿Xi-1 轴 平移ai-1 长度后,使得 新的 坐标系 Z轴与Zi 轴重合—> 连杆长度 。 ③ 接着将上一步得到的新坐标系 绕Zi 轴 旋转θi 角度后,使得 新的 坐标系X轴与X i 轴平行—> 关节转角 。 ④ 在第三步里得到的坐标系与固连在连杆i上的坐标系姿态已一致了,最后只需要将其 沿Zi 平移di 长度之后便可以与固连在连杆i上的坐标系重合了—> 连杆偏距 。 这样则从坐标系i-1到坐标系i的转换关系,便可以针对
i-1坐标系的X轴进行变换,再针对
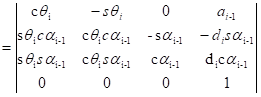
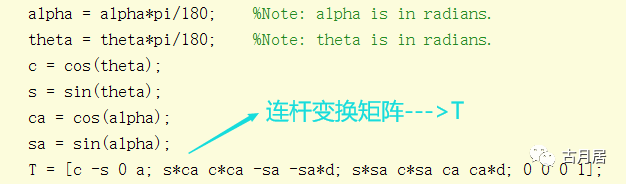
i坐标系的Z轴进行变换【XZ类变换】。只需上述的四个参数便可以确定了【将每个变换代入相应的
平移或旋转算子中并连乘】:
并与之相交【下面提到的限制】。 关于DH参数的介绍,在古月居公众号中有一篇文章《干货|机械臂的坐标系与数学模型:传说中的DH参数》,里面提到了DH参数通过
限制原点位置和
X轴的方向,人为减少了两个自由度,因此它只需要用四个参数即可表达关节之间原本是六自由度的坐标变换【三个方向的旋转和三个方向上的平移】。 根据上面的图我们便知道固连在连杆i-1上的坐标系是这样通过四个DH参数变换到固连在连杆i上的坐标系的: ① 固连在连杆i-1上的坐标系 绕Xi-1 轴 旋转αi-1 角度后,使得 新的 坐标系的Z轴与固连在连杆i上的坐标系的Z i 轴平行—> 关节扭角 。 ② 然后将旋转后的坐标系 沿Xi-1 轴 平移ai-1 长度后,使得 新的 坐标系 Z轴与Zi 轴重合—> 连杆长度 。 ③ 接着将上一步得到的新坐标系 绕Zi 轴 旋转θi 角度后,使得 新的 坐标系X轴与X i 轴平行—> 关节转角 。 ④ 在第三步里得到的坐标系与固连在连杆i上的坐标系姿态已一致了,最后只需要将其 沿Zi 平移di 长度之后便可以与固连在连杆i上的坐标系重合了—> 连杆偏距 。 这样则从坐标系i-1到坐标系i的转换关系,便可以针对
i-1坐标系的X轴进行变换,再针对
i坐标系的Z轴进行变换【XZ类变换】。只需上述的四个参数便可以确定了【将每个变换代入相应的
平移或旋转算子中并连乘】:
![]()
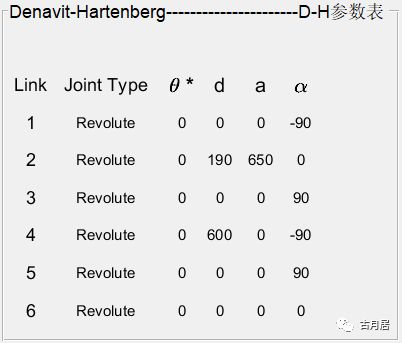
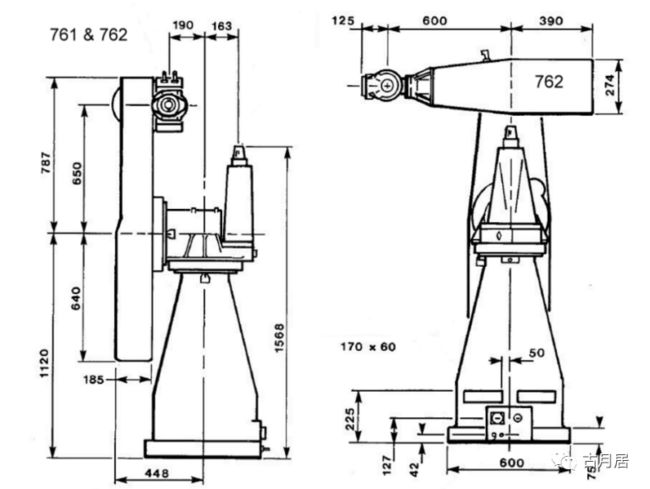
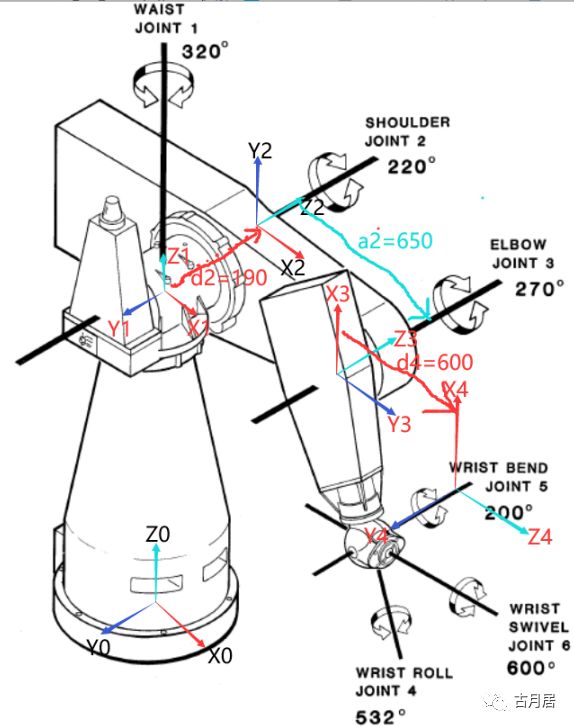
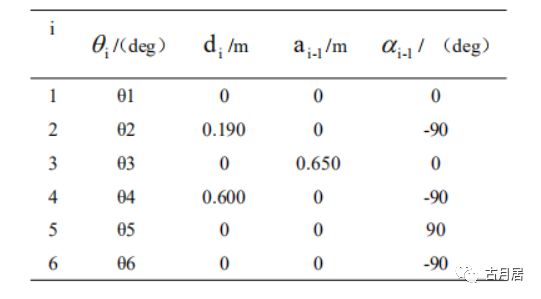
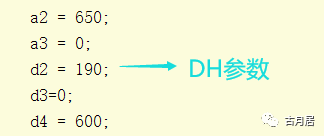
![]() 根据改进DH的规定,可以得到PUMA762的DH参数。
根据改进DH的规定,可以得到PUMA762的DH参数。
![]()
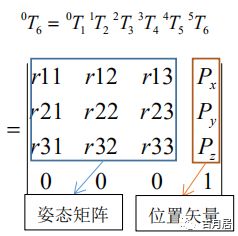
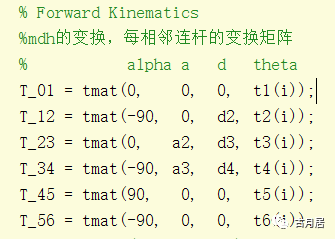
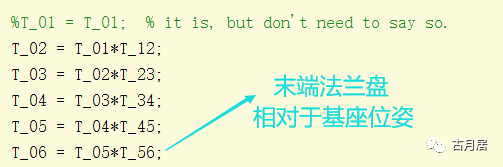
![]() i-1Ti,将DH参数代入计算,可以得到每一个连杆变换矩阵,最后将其连乘可以得到机器人末端法兰盘到基坐标的变换关系:
i-1Ti,将DH参数代入计算,可以得到每一个连杆变换矩阵,最后将其连乘可以得到机器人末端法兰盘到基坐标的变换关系:
![]()
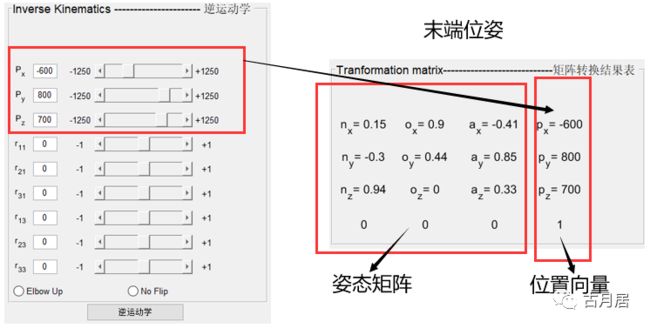
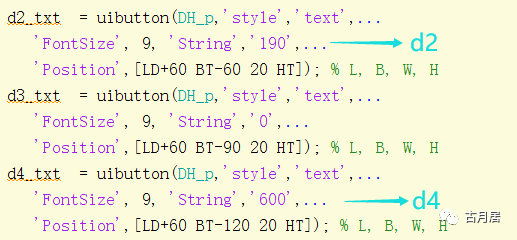
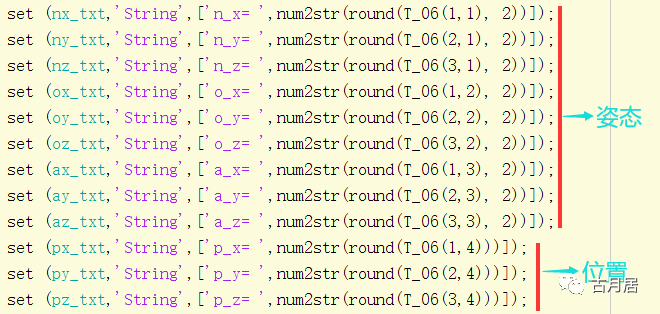
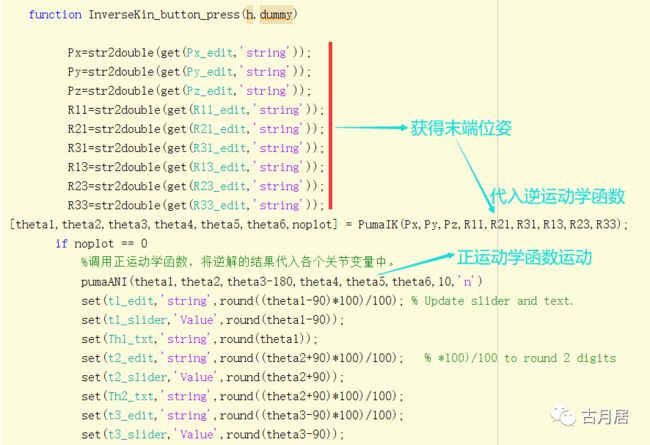
![]() 这部分获得的矩阵计算结果刚好用于显示
矩阵转换结果表面板。 如下,是正运动学函数pumaANI中关键代码的截图:
这部分获得的矩阵计算结果刚好用于显示
矩阵转换结果表面板。 如下,是正运动学函数pumaANI中关键代码的截图:
![]()
![]()
![]()
![]()




通过上面的演示,我们知道该GUI的演示内容,对机器人正逆运动学也有了感性的认识:
针对串联机器人,正运动学即通过改变机器人的关节角度,得到机器人末端运动后的位姿【笛卡尔空间】;
逆运动学即通过设定机器人的末端位姿,以求解机器人各个关节的角度值【关节空间】,以保证机器人通过计算获得的关节角度运动到设定的末端位姿。
![]()
(1)在学习过程中利用MATLAB对机器人运动学进行仿真实验是很好方法之一。Mathworks在机器人学方面分享有很多可供大家学习的资源,感兴趣的可以看看:
https://ww2.mathworks.cn/solutions/robotics.html
(2)demo的更多细节【PUMA762如何可视化在GUI坐标区,并通过滑块控件或文本编辑框空间实现运动的。该机器人的运动学逆解不唯一又是怎样处理的】可以从上述提到的MATLAB附加功能中下载源码学习,也可以参考:
https://github.com/PascPeli/Puma-Robot-Simulation。
(3)关于DH的参考链接:
https://www.bilibili.com/video/av83245052/?redirectFrom=h5
https://www.bilibili.com/video/av70454946
https://www.bilibili.com/video/av68720694
https://www.zhihu.com/question/22365926
直播预告
你问古月答—第六期
直播时间:今晚20:00—21:00
嘉宾:古月君(胡春旭)