基于PyQt5的ROS移动机器人的人机交互UI界面
百度云链接失效了,上传了github:https://github.com/1508912767/ros_car 和https://github.com/1508912767/ros_car_py
每次做实验的时候,手动rosrun,roslaunch太过麻烦,通过 ui界面的话,只需要点点按钮就可以啦
ros_car_py包括运动,建图,导航,ui界面的程序全部打包上传,相互依赖关系见ros_car_py包。
import sys
from PyQt5.QtCore import *
from PyQt5.QtGui import *
from PyQt5.QtWidgets import *
import os
import paramiko
# 控制小车运动,启动服务器线程
class WorkThread(QThread):
"""
使用 pyqtsignalo函数创建信号时,信号可以传递多个参数,并指定信号传递参
数的类型,参数类型是标准的 Python数据类型(字符串、日期、布尔类型、数字、
列表、元组和字典)
"""
# 写在这里是有讲究的,类外也用到了这个trigger
trigger = pyqtSignal()
def __int__(self):
super(WorkThread, self).__init__()
def run(self):
os.system(
"gnome-terminal -x bash -c 'source ~/catkin_ws/devel/setup.bash; roslaunch ros_car_py car_running.launch'"
)
# 循环完毕后发出信号
self.trigger.emit()
# 使用ssh连接板子,启动客户端线程
class WorkThreadA(QThread):
trigger = pyqtSignal()
def __int__(self):
super(WorkThreadA, self).__init__()
self.hostname = "192.168.7.2"
self.port = 22
self.username = "root"
self.password = ""
self.execmd = "python"
def run(self):
s = paramiko.SSHClient()
s.set_missing_host_key_policy(paramiko.AutoAddPolicy())
s.connect(hostname=self.hostname, port=self.port, username=self.username, password=self.password)
stdin, stdout, stderr = s.exec_command(self.execmd)
stdin.write("Y") # Generally speaking, the first connection, need a simple interaction.
# print(stdout.read())
s.close()
# 循环完毕后发出信号
self.trigger.emit()
# 启动建图线程
class WorkThreadB(QThread):
trigger = pyqtSignal()
def __int__(self):
super(WorkThreadB, self).__init__()
def run(self):
os.system(
"gnome-terminal -x bash -c 'source ~/catkin_ws/devel/setup.bash; roslaunch ros_car_py car_gmapping.launch'"
)
# 循环完毕后发出信号
self.trigger.emit()
# 启动导航线程
class WorkThreadC(QThread):
trigger = pyqtSignal()
def __int__(self):
super(WorkThreadC, self).__init__()
def run(self):
os.system(
"gnome-terminal -x bash -c 'source ~/catkin_ws/devel/setup.bash; roslaunch ros_car_py car_navigation.launch'"
)
# 循环完毕后发出信号
self.trigger.emit()
# 显示小车状态,速度信息窗口
class ThirdWindow(QWidget):
def __init__(self):
super().__init__()
self.setWindowTitle("小车的速度状态")
self.resize(600, 300)
self.center()
# 实例化指针
self.pointer = QPixmap() # 创建一个pixmap对象
self.pointer.load("./yellow_pin.png")
# 开一个定时器来进行自动旋转演示
self.angle = 0
self.i = 1
self.change_pix()
self.timer = QTimer(self)
self.timer.setInterval(50) # 50毫秒
self.timer.timeout.connect(self.timeChange)
self.timer.start()
def change_pix(self):
self.left = {1: './left.png', 2: "./left2.png", 3: './left3.png'}
self.right = {1: './right.png', 2: "./right2.png", 3: './right3.png'}
self.up = {1: './up.png', 2: "./up2.png", 3: './up3.png'}
self.down = {1: './down.png', 2: "./down2.png", 3: './down3.png'}
self.pix_left = QPixmap(self.left[self.i], "0", Qt.AvoidDither | Qt.ThresholdDither | Qt.ThresholdAlphaDither)
self.pix_right = QPixmap(self.right[self.i], "0", Qt.AvoidDither | Qt.ThresholdDither | Qt.ThresholdAlphaDither)
self.pix_up = QPixmap(self.up[self.i], "0", Qt.AvoidDither | Qt.ThresholdDither | Qt.ThresholdAlphaDither)
self.pix_down = QPixmap(self.down[self.i], "0", Qt.AvoidDither | Qt.ThresholdDither | Qt.ThresholdAlphaDither)
# 每500毫秒修改paint
def timeChange(self):
self.update()
self.i += 1
if self.i == 4:
self.i = 1
self.change_pix()
def paintEvent(self, event):
painter_left = QPainter(self)
painter_left.drawPixmap(50, 170, self.pix_left.width(), self.pix_left.height(), self.pix_left)
painter_right = QPainter(self)
painter_right.drawPixmap(150, 170, self.pix_right.width(), self.pix_right.height(), self.pix_right)
painter_up = QPainter(self)
painter_up.drawPixmap(100, 120, self.pix_up.width(), self.pix_up.height(), self.pix_up)
painter_down = QPainter(self)
painter_down.drawPixmap(100, 220, self.pix_down.width(), self.pix_down.height(), self.pix_down)
painter = QPainter(self)
painter.drawPixmap(0, 0, 300, 113, QPixmap("./forum.png"))
painter.drawPixmap(300, 0, 300, 113, QPixmap("./forum.png"))
painter.setRenderHint(QPainter.Antialiasing) # 绘制图像反锯齿
self.angle += 1
if self.angle > 360:
self.angle = 0
self.drawspeedPoniter(self.angle)
def drawspeedPoniter(self, angle):
painter1 = QPainter(self)
painter1.setRenderHint(QPainter.Antialiasing) # 绘制图像反锯齿
painter1.translate(150, 50) # 将坐标远点重新放置在表盘中央
painter1.save()
painter1.rotate(angle)
# 计算大小以及坐标
painter1.drawPixmap(-5.9, -22.5, self.pointer.width()/10, self.pointer.height()/10, self.pointer)
painter1.restore()
painter2 = QPainter(self)
painter2.setRenderHint(QPainter.Antialiasing) # 绘制图像反锯齿
painter2.translate(450, 50) # 将坐标重新放置在窗口中央
painter2.save()
painter2.rotate(angle)
"""
计算好我们的旋转中心,也就是我们的表盘的中心,这个位置不是我们整张图片或者是整个窗口的中心,而是我们表盘的圆心所在坐标
计算好之后,我们使用translate函数将我们窗口的坐标原点转换为我们的圆心点
并且将我们指针这张图片的圆心移动到这里,使我们的仪表盘的圆心、窗口坐标原点、以及指针的圆心重合
"""
painter2.drawPixmap(-5.9, -22.5, self.pointer.width() / 10, self.pointer.height() / 10, self.pointer)
painter2.restore()
def closeEvent(self, event):
# 重写关闭事件,回到第一界面
self.close()
event.accept()
def center(self):
# 获取屏幕尺寸
screen = QDesktopWidget().screenGeometry()
size = self.geometry()
# move函数是设置窗口的位置
self.move((screen.width() - size.width()) / 2, (screen.height() - size.height()) / 2)
# 当选择turnaround时弹出的第二个窗口
class SecondWindow(QWidget):
def __init__(self, name):
super().__init__()
self.setWindowTitle(name)
self.resize(400, 300)
# 主窗口居中显示(相对于屏幕)
self.center()
self.windowList = []
layout = QVBoxLayout()
# 设置中间文本
self.label1 = QLabel()
self.label2 = QLabel()
self.label3 = QLabel()
self.label1.setText("1.请先确保ros_car_py包安装成功,并且编译成功")
self.label1.setAlignment(Qt.AlignTop)
self.label1.setFont(QFont("Roman times", 12, QFont.Bold))
self.label2.setText("2.请将Logitech或飞行遥感的usb连接上")
self.label2.setAlignment(Qt.AlignTop)
self.label2.setFont(QFont("Roman times", 12, QFont.Bold))
self.label3.setText("3.请检查各项硬件接线和电源的状态")
self.label3.setAlignment(Qt.AlignTop)
self.label3.setFont(QFont("Roman times", 12, QFont.Bold))
self.button1 = QPushButton("启动服务器")
self.button2 = QPushButton("启动客户端")
self.button3 = QPushButton("启动建图")
self.button4 = QPushButton("启动导航")
self.button3.setEnabled(False)
self.button4.setEnabled(False)
self.workThread = WorkThread()
self.workThreada = WorkThreadA()
self.button1.clicked.connect(self.Communicat_with_terminal)
self.button2.clicked.connect(self.Communicat_with_client)
self.button5 = QPushButton("显示小车状态")
self.button5.clicked.connect(self.show_car_info)
self.button6 = QPushButton("重新选择")
self.button6.clicked.connect(self.close)
layout.addWidget(self.label1)
layout.addWidget(self.label2)
layout.addWidget(self.label3)
layout.addWidget(self.button1)
layout.addWidget(self.button2)
layout.addWidget(self.button3)
layout.addWidget(self.button4)
layout.addWidget(self.button5)
layout.addWidget(self.button6)
self.setLayout(layout)
def Communicat_with_terminal(self):
# 终端ros_running开始
self.workThread.start()
# 当获得终端任务完毕的信号时,停止计数
# self.workThread.trigger.connect()
def Communicat_with_client(self):
# 服务器终端开始
self.workThreada.start()
# 当获得终端任务完毕的信号时,停止计数
# self.workThread.trigger.connect()
def closeEvent(self, event):
# 重写关闭事件,回到第一界面
the_window = Radiodemo()
self.windowList.append(the_window)
self.close()
the_window.show()
event.accept()
def center(self):
# 获取屏幕尺寸
screen = QDesktopWidget().screenGeometry()
size = self.geometry()
# move函数是设置窗口的位置
self.move((screen.width() - size.width()) / 2, (screen.height() - size.height()) / 2)
def show_car_info(self):
car_velocity = ThirdWindow()
self.windowList.append(car_velocity)
car_velocity.show()
# 当选择gmapping时弹出的第二个窗口
class SecondWindowgmapping(SecondWindow):
def __init__(self, name):
super().__init__(name)
self.button3.setEnabled(True)
self.workThreadb = WorkThreadB()
self.button3.clicked.connect(self.Communicat_with_map)
def Communicat_with_map(self):
self.workThreadb.start()
# 当选择navigation时弹出的第二个窗口
class SecondWindownavigation(SecondWindow):
def __init__(self, name):
super().__init__(name)
self.button4.setEnabled(True)
self.workThreadc = WorkThreadC()
self.button4.clicked.connect(self.Communicat_with_nav)
def Communicat_with_nav(self):
self.workThreadc.start()
# 第一个窗口,选择要进行的实验
class Radiodemo(QWidget):
"""两个互斥的按钮"""
def __init__(self, parent=None):
super(Radiodemo, self).__init__(parent)
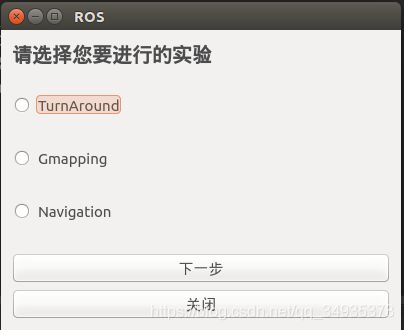
self.setWindowTitle("ROS")
self.resize(400, 300)
# 主窗口居中显示(相对于屏幕)
self.center()
self.windowList = []
layout = QVBoxLayout()
label1 = QLabel(self)
label1.setText("请选择您要进行的实验")
label1.setFont(QFont("Roman times", 15, QFont.Bold))
label1.setAutoFillBackground(True)
# 固定方式对齐
label1.setAlignment(Qt.AlignTop)
self.btn1 = QRadioButton("TurnAround")
self.btn2 = QRadioButton("Gmapping")
self.btn3 = QRadioButton("Navigation")
self.btn4 = QPushButton("下一步")
self.btn5 = QPushButton("关闭")
# 气泡提示信息
QToolTip.setFont(QFont('SansSerif', 10)) # 字体和大小
self.btn1.setToolTip('控制小车运动')
self.btn2.setToolTip('控制小车运动并完成Gmapping建图')
self.btn3.setToolTip('小车规划路径自动避障运动到目标点')
self.btn1.setChecked(False)
self.btn1.toggled.connect(lambda: self.btnstate(self.btn1))
self.btn2.setChecked(False)
self.btn2.toggled.connect(lambda: self.btnstate(self.btn2))
self.btn3.setChecked(False)
self.btn3.toggled.connect(lambda: self.btnstate(self.btn3))
self.btn4.clicked.connect(self.nextButtonClick)
self.btn5.clicked.connect(self.onButtonClick)
layout.addWidget(label1)
# #水平居左 垂直居上
layout.addWidget(self.btn1, 0, Qt.AlignLeft | Qt.AlignTop)
layout.addWidget(self.btn2, 0, Qt.AlignLeft | Qt.AlignTop)
layout.addWidget(self.btn3, 0, Qt.AlignLeft | Qt.AlignTop)
layout.addWidget(self.btn4)
layout.addWidget(self.btn5)
self.setLayout(layout)
def center(self):
# 获取屏幕尺寸
screen = QDesktopWidget().screenGeometry()
size = self.geometry()
# move函数是设置窗口的位置
self.move((screen.width() - size.width()) / 2, (screen.height() - size.height()) / 2)
def btnstate(self, btn):
if btn.text() == "TurnAround":
if btn.isChecked():
print(btn.text() + "将要被执行")
else:
print(btn.text() + "被取消")
if btn.text() == "Gmapping":
if btn.isChecked():
print(btn.text() + "将要被执行")
else:
print(btn.text() + "被取消")
if btn.text() == "Navigation":
if btn.isChecked():
print(btn.text() + "将要被执行")
else:
print(btn.text() + "被取消")
def nextButtonClick(self):
if self.btn1.isChecked():
turn_around_window = SecondWindow("TurnAround")
self.windowList.append(turn_around_window)
# 先关闭第一个窗口,视觉上好看
self.close()
turn_around_window.show()
elif self.btn2.isChecked():
gmapping_window = SecondWindowgmapping("Gmapping")
self.windowList.append(gmapping_window)
self.close()
gmapping_window.show()
elif self.btn3.isChecked():
navigation_window = SecondWindownavigation("Navigation")
self.windowList.append(navigation_window)
self.close()
navigation_window.show()
def onButtonClick(self):
q = QApplication.instance()
print("程序关闭!")
q.quit()
if __name__ == '__main__':
app = QApplication(sys.argv)
radioDemo = Radiodemo()
radioDemo.show()
sys.exit(app.exec_())



小车速度状态和前进方向显示暂时还未完善,没有找到合适的素材,所以借用了一些博主的图片。