解析Valve的“Lighthouse”追踪系统技术
头部追踪是VR头显非常重要的技术指标,最传统的方法是使用惯性传感器,但惯性传感器只能追踪头部的转动,要想追踪头部的位移,需引入光学系统。Valve的Lighthouse追踪系统是目前较好的VR光学跟踪方案。
Lighthouse是基于一组传感器,能监测配套基站激光束的跟踪系统,为HTC Vive提供Room Scale房型虚拟现实体验,通过VR头显和控制器追踪定位空间。
Lighthouse追踪技术
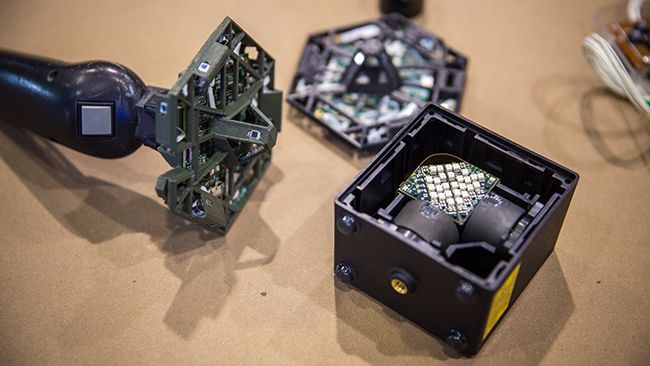
Lighthouse由两个基站构成,每个基站里有一个红外LED阵列,两个转轴互相垂直的旋转的红外激光发射器。激光基站的工作原理是基于Lighthouse 的长期无漂移(drift-free )位置追踪技术。每个Lighthouse基站包含两束激光。一个是水平的激光(基站的坐标系统)从下到上(位于基站前方)横扫追踪的数量;另一束激光是垂直的从左到右横扫追踪数量。两束激光在各种的轴以3600 rpm速度旋转。两束激光在同一基站只能有一个激光扇面可以对整个定位空间进行扫描。
但是该定位追踪准确吗?Oliver Kreylos,计算机科学博士同时是加州大学戴维斯分校的一位VR研究员,有多年虚拟现实数据可视化研究经验,对Lighthouse追踪系统进行了深度解析。
- 更多的基站意味着更加准确的追踪

基站是Lighthouse追踪系统的基础。它使用水平和垂直激光交替扫描检测HTC Vive头显和SteamVR控制器,同时头显和控制器里面的小型传感器会检测经过的激光。然后系统巧妙地整合了所有的数据用来确定设备的转动和3D空间的位置。每个设备中装载的高速IMUs被用来协助定位追踪。
Kreylos试图测量系统的“抖动”,即完全静止站立的测量物体(指头显)在测量时所产生的误差。随着时间的推移,通过3D空间的追踪系统在每个位置的读数,他能够测量每个轴上读数的数量。

Kreylos通过两个基站追踪Vive头显发现系统的抖动误差约为0.3mm,这意味着对于追踪系统而言,头显似乎在空间领域中都会有0.3mm的误差(尽管在现实中头显是完全静止的)。
幸运的是,这个亚毫米级抖动误差很小,以至于当我们戴着头显的时候是感受不到的。
有趣的是,Kreylos发现当只一个基站覆盖的时候,抖动仍然为0.3mm,而当轴指向另一个基站的时,误差会达到2.1mm。
这意味着两个基站同时被检测到的时候,Lighthouse可以更加精确地追踪物体。未来Vive头显可能会添加传感器为了在任何时候看到基站。
- 精确度和准确度
Kreylos试图同时测量Lighthouse的精确度和准确度。他解释精确度测量是“在空间中对同一个点多次测量的结果相似度”,准确度是指:“在空间中对一个点的测量和真实的点位置的相似度”。
正如所有好的科学家,Kreylos首先解释了测量的方法:
我把一个36英寸的尺子放在地板上,位于追踪空间的中心,然后用我附在其中一个追踪控制器的小型探针针尖来标识出每1英寸的3D位置(位于控制器的本地坐标系的探针针尖位置,是对点进行重复测量的关键,这是源于一个简单的校准程序)。接下来,我把每个三维点的测量结果与“理想”的三维点进行比较。这个理想的三维点是通过非线性点集的对准算法在一些任意坐标系中生成每一个点的理论位置。
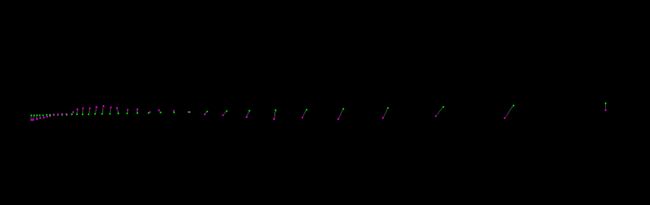
绿色代表着理想的测量点,而紫色显示了Lighthouse追踪测量点。——Oliver Kreylos
基于这些测量,Kreylos预计,Lighthouse的精确度为RMS 1.5mm;准确度为RMS 1.9 mm。
尽管上图测量中有一些失真,但Kreylos表示“(Lighthouse)整体的准确度非常好”,并进一步推断,作为一个有实际意义的结果,因此,附加一个校准探针针尖的Lighthouse控制器,有可能作为一个大面积三维数字化仪来使用,预期精度约为2mm。
漂移校正

Kreylos同时检查并解释:当激光扫描每个轴的时候,Lighthouse系统校正的控制器的IMU的方式。
通过让控制器围绕着头部进行高速转动,并绘制测量数据,Kreylos可以可视化漂移校正。
英文来源: Analysis of Valve’s ‘Lighthouse’ Tracking System Reveals Accuracy
作者: Ben Lang
译者: 屠敏 欢迎技术投稿、约稿,给文章纠错,请发送邮件[email protected]
第一时间掌握最新移动开发相关信息和技术,请关注mobilehub公众微信号(ID: mobilehub)。

更多内容请关注VR知识库。该知识库包含了专家精心绘制的VR知识图谱,及由特邀编辑(领域专家)从海量数据中层层筛选出的精华内容和资源(学习视频、实践Demo、图书)。扫描下方二维码,立即查看VR知识库精彩内容。
