线性代数(关于矩阵的运算及各种分解的python实现)
线性代数
- 1 矩阵和向量积
- 2 矩阵特征值与特征向量
- 3 矩阵分解
- 3.1 奇异值分解
- 3.2 QR分解
- 3.3 Cholesky分解
- 4 范数和其它数字
- 4.1 矩阵的范数
- 4.2 方阵的行列式
- 4.3 矩阵的秩
- 4.4 矩阵的迹
- 5 解方程和逆矩阵
- 5.1 逆矩阵(inverse matrix)
- 5.2 求解线性方程组
Numpy 定义了 matrix 类型,使用该 matrix 类型创建的是矩阵对象,它们的加减乘除运算缺省采
用矩阵方式计算,因此用法和Matlab十分类似。但是由于 NumPy 中同时存在 ndarray 和 matrix
对象,因此用户很容易将两者弄混。这有违 Python 的“显式优于隐式”的原则,因此官方并不推荐
在程序中使用 matrix 。在这里,我们仍然用 ndarray 来介绍。
矩阵和向量积
矩阵的定义、矩阵的加法、矩阵的数乘、矩阵的转置与二维数组完全一致,不再进行说明,但矩阵的
乘法有不同的表示。numpy.dot(a, b[, out]) 计算两个矩阵的乘积,如果是一维数组则是它们的内积。
【例1】
import numpy as np
x = np.array([1, 2, 3, 4, 5])
y = np.array([2, 3, 4, 5, 6])
z = np.dot(x, y) #向量点乘和矩阵乘法
print(z) # 70
x = np.array([[1, 2, 3], [3, 4, 5], [6, 7, 8]])
print(x)
# [[1 2 3]
# [3 4 5]
# [6 7 8]]
y = np.array([[5, 4, 2], [1, 7, 9], [0, 4, 5]])
print(y)
# [[5 4 2]
# [1 7 9]
# [0 4 5]]
z = np.dot(x, y)
print(z)
# [[ 7 30 35]
# [ 19 60 67]
# [ 37 105 115]]
z = np.dot(y, x)
print(z)
# [[ 29 40 51]
# [ 76 93 110]
# [ 42 51 60]]
70
[[1 2 3]
[3 4 5]
[6 7 8]]
[[5 4 2]
[1 7 9]
[0 4 5]]
[[ 7 30 35]
[ 19 60 67]
[ 37 105 115]]
[[ 29 40 51]
[ 76 93 110]
[ 42 51 60]]
注意:在线性代数里面讲的维数和数组的维数不同,如线代中提到的n维行向量在 Numpy 中是一维
数组,而线性代数中的n维列向量在 Numpy 中是一个shape为(n, 1)的二维数组。如下的行向量就是一个一维数组、列向量就是一个二维数组:
a = np.array([1, 2, 3])
a = a.reshape(-1, 1)
a
array([[1],
[2],
[3]])
矩阵特征值与特征向量
- numpy.linalg.eig(a) 计算方阵的特征值和特征向量。
- numpy.linalg.eigvals(a) 计算方阵的特征值。
【例1】求方阵的特征值特征向量
import numpy as np
# 创建一个对角矩阵!
x = np.diag((1, 2, 3)) #注意此处为圆括号
print(x)
# [[1 0 0]
# [0 2 0]
# [0 0 3]]
print(np.linalg.eigvals(x))
# [1. 2. 3.]
a, b = np.linalg.eig(x)
# 特征值保存在a中,特征向量保存在b中
print(a)
# [1. 2. 3.]
print(b)
# [[1. 0. 0.]
# [0. 1. 0.]
# [0. 0. 1.]]
# 检验特征值与特征向量是否正确
for i in range(3):
if np.allclose(a[i] * b[:, i], np.dot(x, b[:, i])):
#allclose用于比较两个array是不是每一个元素都相等,相等输出Right,不等输出Error
#用于验证lamda*x=A*x
print('Right')
else:
print('Error')
# Right
# Right
# Right
[[1 0 0]
[0 2 0]
[0 0 3]]
[1. 2. 3.]
[1. 2. 3.]
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
Right
Right
Right
【例2】判断对称阵是否为正定阵(特征值是否全部为正)。
import numpy as np
A = np.arange(16).reshape(4, 4)
print(A)
# [[ 0 1 2 3]
# [ 4 5 6 7]
# [ 8 9 10 11]
# [12 13 14 15]]
A = A + A.T # 将方阵转换成对称阵
print(A)
# [[ 0 5 10 15]
# [ 5 10 15 20]
# [10 15 20 25]
# [15 20 25 30]]
B = np.linalg.eigvals(A) # 求A的特征值
print(B)
# [ 6.74165739e+01 ‐7.41657387e+00 1.82694656e‐15 ‐1.72637110e‐15]
# 判断是不是所有的特征值都大于0,用到了all函数,显然对称阵A不是正定的
if np.all(B > 0):
print('Yes')
else:
print('No')
# No
range() 与 np.arange():
- range()返回的是range object,而np.arange()返回的是numpy.ndarray(type(np.arange(10)) == np.ndarray)
(1)两者都是均匀地(evenly)等分区间;
- range尽可用于迭代,而np.arange作用远不止于此,它是一个序列,可被当做向量使用。
- range()不支持步长为小数,np.arange()支持步长为小数
(2)两者都可用于迭代
(3)两者都有三个参数,以第一个参数为起点,第三个参数为步长,截止到第二个参数之前的不包括第二个参数的数据序列
某种意义上,和STL中由迭代器组成的区间是一样的,即左闭右开的区间。[first, last)或者不加严谨地写作[first:step:last)
range(1,5)
tuple(range(1, 5))
list(range(1, 5))
r = range(1, 5)
type(r)
#1
2
3
4
---------------------------------------------------------------------------
TypeError Traceback (most recent call last)
in
15 #array([1, 2, 3, 4])
16 #----------------
---> 17 range(1, 5, .1)
TypeError: 'float' object cannot be interpreted as an integer
#----------------
np.arange(1, 5, .5)
#----------------
range(1, 5, 2)
for i in range(1, 5, 2):
print(i)
#----------------
for i in np.arange(1, 5):
print(i)
1
3
1
2
3
4
np.arange(1, 5, .5)
array([1. , 1.5, 2. , 2.5, 3. , 3.5, 4. , 4.5])
【例2】判断对称阵是否为正定阵(特征值是否全部为正)。
import numpy as np
A = np.arange(16).reshape(4, 4)
print(A)
# [[ 0 1 2 3]
# [ 4 5 6 7]
# [ 8 9 10 11]
# [12 13 14 15]]
A = A + A.T # 将方阵转换成对称阵
print(A)
# [[ 0 5 10 15]
# [ 5 10 15 20]
# [10 15 20 25]
# [15 20 25 30]]
B = np.linalg.eigvals(A) # 求A的特征值
print(B)
# [ 6.74165739e+01 ‐7.41657387e+00 1.82694656e‐15 ‐1.72637110e‐15]
# 判断是不是所有的特征值都大于0,用到了all函数,显然对称阵A不是正定的
if np.all(B > 0):
print('Yes')
else:
print('No')
# No
[[ 0 1 2 3]
[ 4 5 6 7]
[ 8 9 10 11]
[12 13 14 15]]
[[ 0 5 10 15]
[ 5 10 15 20]
[10 15 20 25]
[15 20 25 30]]
[ 6.74165739e+01 -7.41657387e+00 1.82694656e-15 -1.72637110e-15]
No
矩阵分解
奇异值分解
奇异值分解常常用于图像降噪(去除奇异值较小的部分)、数据压缩(把一副图像概括为相似的几个小部分的重复,保留了原始特征)。
- u, s, v = numpy.linalg.svd(a, full_matrices=True, compute_uv=True, hermitian=False) 奇异值分解
a 是一个形如(M,N)矩阵
full_matrices 的取值是为False或者True,默认值为True,这时 u 的大小为(M,M), v 的大小为(N,N)。否则 u 的大小为(M,K), v 的大小为(K,N) ,K=min(M,N)。
compute_uv 的取值是为False或者True,默认值为True,表示计算 u,s,v 。为False的时候只计算 s 。
总共有三个返回值 u,s,v , u 大小为(M,M), s 大小为(M,N), v 大小为(N,N), a =usv 。
其中 s 是对矩阵 a 的奇异值分解。 s 除了对角元素不为 0 ,其他元素都为 0 ,并且对角元
素从大到小排列。 s 中有 n 个奇异值,一般排在后面的比较接近0,所以仅保留比较大的 r
个奇异值。
注:Numpy中返回的 v 是通常所谓奇异值分解 a=usv’ 中 v 的转置。
【例1】展示了奇异值分解的原理,即将矩阵拆分成三个部分:前后两个是 A^TA 与 AA^T 对应的特征向量组成的单位正交阵,中间一个是奇异值组成的对角阵。后面再点乘回去,验证了奇异值分解的正确性。
import numpy as np
A = np.array([[4, 11, 14], [8, 7, -2]])
print(A)
# [[ 4 11 14]
# [ 8 7 ‐2]]
u, s, vh = np.linalg.svd(A, full_matrices=False)
print(u.shape) # (2, 2)
print(u)
# [[‐0.9486833 ‐0.31622777]
# [‐0.31622777 0.9486833 ]]
print(s.shape) # (2,)
print(np.diag(s))
# [[18.97366596 0. ]
# [ 0. 9.48683298]]
print(vh.shape) # (2, 3)
print(vh)
# [[‐0.33333333 ‐0.66666667 ‐0.66666667]
# [ 0.66666667 0.33333333 ‐0.66666667]]
a = np.dot(u, np.diag(s))
a = np.dot(a, vh)
print(a)# [[ 4. 11. 14.]
# [ 8. 7. ‐2.]]
[[ 4 11 14]
[ 8 7 -2]]
(2, 2)
[[ 0.9486833 -0.31622777]
[ 0.31622777 0.9486833 ]]
(2,)
[[18.97366596 0. ]
[ 0. 9.48683298]]
(2, 3)
[[ 0.33333333 0.66666667 0.66666667]
[ 0.66666667 0.33333333 -0.66666667]]
[[ 4. 11. 14.]
[ 8. 7. -2.]]
【例2】 同上 也是展示了原理 验证了正确性
import numpy as np
A = np.array([[1, 1], [1, - 2], [2, 1]])
print(A)
# [[ 1 1]
# [ 1 ‐2]
# [ 2 1]]
u, s, vh = np.linalg.svd(A, full_matrices=False)
print(u.shape) # (3, 2)
print(u)
# [[‐5.34522484e‐01 ‐1.11022302e‐16]
# [ 2.67261242e‐01 ‐9.48683298e‐01]
# [‐8.01783726e‐01 ‐3.16227766e‐01]]
print(s.shape) # (2,)
print(np.diag(s))
# [[2.64575131 0. ]
# [0. 2.23606798]]
print(vh.shape) # (2, 2)
print(vh)
# [[‐0.70710678 ‐0.70710678]
# [‐0.70710678 0.70710678]]
a = np.dot(u, np.diag(s))
a = np.dot(a, vh)
print(a)
# [[ 1. 1.]
# [ 1. ‐2.]
# [ 2. 1.]]
[[ 1 1]
[ 1 -2]
[ 2 1]]
(3, 2)
[[-5.34522484e-01 -1.11022302e-16]
[ 2.67261242e-01 -9.48683298e-01]
[-8.01783726e-01 -3.16227766e-01]]
(2,)
[[2.64575131 0. ]
[0. 2.23606798]]
(2, 2)
[[-0.70710678 -0.70710678]
[-0.70710678 0.70710678]]
[[ 1. 1.]
[ 1. -2.]
[ 2. 1.]]
QR分解
将矩阵分解成一个正规正交矩阵Q与上三角形矩阵R的方法。QR(正交三角)分解法是求一般矩阵全部特征值的最有效并广泛应用的方法,一般矩阵先经过正交相似变化成为Hessenberg矩阵,然后再应用QR方法求特征值和特征向量。
- q,r = numpy.linalg.qr(a, mode=‘reduced’) 计算矩阵 a 的QR分解。
a 是一个(M, N)的待分解矩阵。
mode = reduced :返回(M, N)的列向量两两正交的矩阵 q ,和(N, N)的三角阵r (Reduced QR分解)。
mode = complete :返回(M, M)的正交矩阵 q ,和(M, N)的三角阵 r (Full QR分解)。
【例1】
import numpy as np
A = np.array([[2, -2, 3], [1, 1, 1], [1, 3, -1]])
print(A)
# [[ 2 ‐2 3]
# [ 1 1 1]
# [ 1 3 ‐1]]
q, r = np.linalg.qr(A)
print(q.shape)
# (3, 3)
print(q)
# [[‐0.81649658 0.53452248 0.21821789]
# [‐0.40824829 ‐0.26726124 ‐0.87287156]
# [‐0.40824829 ‐0.80178373 0.43643578]]
print(r.shape) # (3, 3)
print(r)
# [[‐2.44948974 0. ‐2.44948974]
# [ 0. ‐3.74165739 2.13808994]
# [ 0. 0. ‐0.65465367]]
print(np.dot(q, r))
# [[ 2. ‐2. 3.]
# [ 1. 1. 1.]
# [ 1. 3. ‐1.]]
a = np.allclose(np.dot(q.T, q), np.eye(3)) #比较一下两个矩阵是否相等
print(a) # True
[[ 2 -2 3]
[ 1 1 1]
[ 1 3 -1]]
(3, 3)
[[-0.81649658 0.53452248 0.21821789]
[-0.40824829 -0.26726124 -0.87287156]
[-0.40824829 -0.80178373 0.43643578]]
(3, 3)
[[-2.44948974 0. -2.44948974]
[ 0. -3.74165739 2.13808994]
[ 0. 0. -0.65465367]]
[[ 2. -2. 3.]
[ 1. 1. 1.]
[ 1. 3. -1.]]
True
import numpy as np
A = np.array([[1, 1], [1, -2], [2, 1]])
print(A)
# [[ 1 1]
# [ 1 ‐2]
# [ 2 1]]
q, r = np.linalg.qr(A, mode='complete')
print(q.shape) # (3, 3)
print(q)
# [[‐0.40824829 0.34503278 ‐0.84515425]
# [‐0.40824829 ‐0.89708523 ‐0.16903085]
# [‐0.81649658 0.27602622 0.50709255]]
print(r.shape) # (3, 2)
print(r)
# [[‐2.44948974 ‐0.40824829]
# [ 0. 2.41522946]
# [ 0. 0. ]]
print(np.dot(q, r))
# [[ 1. 1.]
# [ 1. ‐2.]
# [ 2. 1.]]
a = np.allclose(np.dot(q, q.T), np.eye(3))
print(a) # True
[[ 1 1]
[ 1 -2]
[ 2 1]]
(3, 3)
[[-0.40824829 0.34503278 -0.84515425]
[-0.40824829 -0.89708523 -0.16903085]
[-0.81649658 0.27602622 0.50709255]]
(3, 2)
[[-2.44948974 -0.40824829]
[ 0. 2.41522946]
[ 0. 0. ]]
[[ 1. 1.]
[ 1. -2.]
[ 2. 1.]]
True
【例3】
import numpy as np
A = np.array([[1, 1], [1, - 2], [2, 1]])
print(A)
# [[ 1 1]
# [ 1 ‐2]
# [ 2 1]]
q, r = np.linalg.qr(A)
print(q.shape) # (3, 2)
print(q)
# [[‐0.40824829 0.34503278]
# [‐0.40824829 ‐0.89708523]
# [‐0.81649658 0.27602622]]
print(r.shape) # (2, 2)
print(r)
# [[‐2.44948974 ‐0.40824829]
# [ 0. 2.41522946]]
print(np.dot(q, r))
# [[ 1. 1.]
# [ 1. ‐2.]
# [ 2. 1.]]
a = np.allclose(np.dot(q.T, q), np.eye(2))
print(a) # True (说明q为正交矩阵)
[[ 1 1]
[ 1 -2]
[ 2 1]]
(3, 2)
[[-0.40824829 0.34503278]
[-0.40824829 -0.89708523]
[-0.81649658 0.27602622]]
(2, 2)
[[-2.44948974 -0.40824829]
[ 0. 2.41522946]]
[[ 1. 1.]
[ 1. -2.]
[ 2. 1.]]
True
Cholesky分解
Cholesky 分解是把一个对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解。它要求矩阵的所有特征值必须大于零,故分解的下三角的对角元也是大于零的。Cholesky分解法又称平方根法。
- L = numpy.linalg.cholesky(a) 返回正定矩阵 a 的 Cholesky 分解 a = L*L.T ,其中 L 是下三角。
【例1】
import numpy as np
A = np.array([[1, 1, 1, 1], [1, 3, 3, 3],
[1, 3, 5, 5], [1, 3, 5, 7]])
print(A)
# [[1 1 1 1]
# [1 3 3 3]
# [1 3 5 5]
# [1 3 5 7]]
print(np.linalg.eigvals(A))
# [13.13707118 1.6199144 0.51978306 0.72323135]
L = np.linalg.cholesky(A)
print(L)
# [[1. 0. 0. 0. ]# [1. 1.41421356 0. 0. ]
# [1. 1.41421356 1.41421356 0. ]
# [1. 1.41421356 1.41421356 1.41421356]]
print(np.dot(L, L.T))
# [[1. 1. 1. 1.]
# [1. 3. 3. 3.]
# [1. 3. 5. 5.]
# [1. 3. 5. 7.]]
[[1 1 1 1]
[1 3 3 3]
[1 3 5 5]
[1 3 5 7]]
[13.13707118 1.6199144 0.51978306 0.72323135]
[[1. 0. 0. 0. ]
[1. 1.41421356 0. 0. ]
[1. 1.41421356 1.41421356 0. ]
[1. 1.41421356 1.41421356 1.41421356]]
[[1. 1. 1. 1.]
[1. 3. 3. 3.]
[1. 3. 5. 5.]
[1. 3. 5. 7.]]
范数和其它数字
矩阵的范数
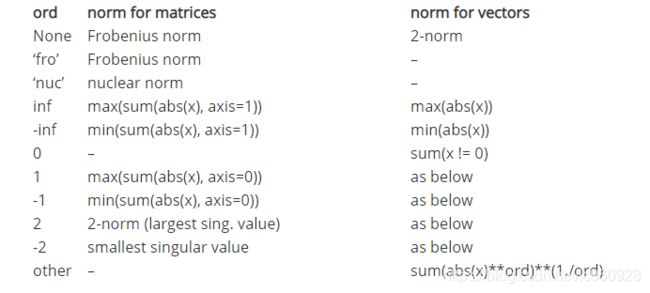
- numpy.linalg.norm(x, ord=None, axis=None, keepdims=False) 计算向量或者矩阵的范数。
根据 ord 参数的不同,计算不同的范数:
【例1】求向量的范数。
import numpy as np
x = np.array([1, 2, 3, 4])
print(np.linalg.norm(x, ord=1))
# 10.0
print(np.sum(np.abs(x)))
# 10
print(np.linalg.norm(x, ord=2))
# 5.477225575051661
print(np.sum(np.abs(x) ** 2) ** 0.5)
# 5.477225575051661
print(np.linalg.norm(x, ord=-np.inf))# 1.0
print(np.min(np.abs(x)))
# 1
print(np.linalg.norm(x, ord=np.inf))
# 4.0
print(np.max(np.abs(x)))
# 4
10.0
10
5.477225575051661
5.477225575051661
1.0
1
4.0
4
【例2】求矩阵的范数
import numpy as np
A = np.array([[1, 2, 3, 4], [2, 3, 5, 8],
[1, 3, 5, 7], [3, 4, 7, 11]])
print(A)
# [[ 1 2 3 4]
# [ 2 3 5 8]
# [ 1 3 5 7]
# [ 3 4 7 11]]
print(np.linalg.norm(A, ord=1)) # 30.0
print(np.max(np.sum(A, axis=0))) # 30
print(np.linalg.norm(A, ord=2))
# 20.24345358700576
print(np.max(np.linalg.svd(A, compute_uv=False)))
# 20.24345358700576
print(np.linalg.norm(A, ord=np.inf)) # 25.0
print(np.max(np.sum(A, axis=1))) # 25
print(np.linalg.norm(A, ord='fro'))
# 20.273134932713294
print(np.sqrt(np.trace(np.dot(A.T, A))))
# 20.273134932713294
[[ 1 2 3 4]
[ 2 3 5 8]
[ 1 3 5 7]
[ 3 4 7 11]]
30.0
30
20.24345358700576
20.24345358700576
25.0
25
20.273134932713294
20.273134932713294
方阵的行列式
- numpy.linalg.det(a) 计算行列式。
【例】计算行列式。
import numpy as np
x = np.array([[1, 2], [3, 4]])
print(x)
# [[1 2]
# [3 4]]
print(np.linalg.det(x))
# ‐2.0000000000000004
[[1 2]
[3 4]]
-2.0000000000000004
矩阵的秩
- numpy.linalg.matrix_rank(M, tol=None, hermitian=False) 返回矩阵的秩。
【例】计算矩阵的秩。
import numpy as np
I = np.eye(3) # 先创建一个单位阵
print(I)
# [[1. 0. 0.]
# [0. 1. 0.]
# [0. 0. 1.]]
r = np.linalg.matrix_rank(I)
print(r) # 3
I[1, 1] = 0 # 将该元素置为0
print(I)
# [[1. 0. 0.]
# [0. 0. 0.]
# [0. 0. 1.]]
r = np.linalg.matrix_rank(I) # 此时秩变成2
print(r) # 2
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
3
[[1. 0. 0.]
[0. 0. 0.]
[0. 0. 1.]]
2
矩阵的迹
- numpy.trace(a, offset=0, axis1=0, axis2=1, dtype=None, out=None) 方阵的迹就是主对角元素
之和。
【例】计算方阵的迹。
import numpy as np
x = np.array([[1, 2, 3], [3, 4, 5], [6, 7, 8]])
print(x)
# [[1 2 3]
# [3 4 5]
# [6 7 8]]
y = np.array([[5, 4, 2], [1, 7, 9], [0, 4, 5]])
print(y)
# [[5 4 2]
# [1 7 9]
# [0 4 5]]
print(np.trace(x)) # A的迹等于A.T的迹
# 13
print(np.trace(np.transpose(x)))# A.T的迹也是13
print(np.trace(x + y)) # 和的迹 等于 迹的和
# 30
print(np.trace(x) + np.trace(y))
# 30
[[1 2 3]
[3 4 5]
[6 7 8]]
[[5 4 2]
[1 7 9]
[0 4 5]]
13
13
30
30
解方程和逆矩阵
逆矩阵(inverse matrix)
设 A 是数域上的一个 n 阶矩阵,若在相同数域上存在另一个 n 阶矩阵 B,使得: AB=BA=E (E 为单
位矩阵),则我们称 B 是 A 的逆矩阵,而 A 则被称为可逆矩阵。
- numpy.linalg.inv(a) 计算矩阵 a 的逆矩阵(矩阵可逆的充要条件: det(a) != 0 ,或者 a 满秩)。
【例】计算矩阵的逆矩阵。
import numpy as np
A = np.array([[1, -2, 1], [0, 2, -1], [1, 1, -2]])
print(A)
# [[ 1 ‐2 1]
# [ 0 2 ‐1]
# [ 1 1 ‐2]]
# 求A的行列式,不为零则存在逆矩阵
A_det = np.linalg.det(A)
print(A_det)
# ‐2.9999999999999996
A_inverse = np.linalg.inv(A) # 求A的逆矩阵
print(A_inverse)
# [[ 1.00000000e+00 1.00000000e+00 ‐1.11022302e‐16]
# [ 3.33333333e‐01 1.00000000e+00 ‐3.33333333e‐01]
# [ 6.66666667e‐01 1.00000000e+00 ‐6.66666667e‐01]]
x = np.allclose(np.dot(A, A_inverse), np.eye(3))#矩阵乘其逆,验证是否为单位矩阵
print(x) # True
x = np.allclose(np.dot(A_inverse, A), np.eye(3))
print(x) # True
A_companion = A_inverse * A_det # 求A的伴随矩阵
print(A_companion)
# [[‐3.00000000e+00 ‐3.00000000e+00 3.33066907e‐16]
# [‐1.00000000e+00 ‐3.00000000e+00 1.00000000e+00]
# [‐2.00000000e+00 ‐3.00000000e+00 2.00000000e+00]]
[[ 1 -2 1]
[ 0 2 -1]
[ 1 1 -2]]
-2.9999999999999996
[[ 1.00000000e+00 1.00000000e+00 -1.11022302e-16]
[ 3.33333333e-01 1.00000000e+00 -3.33333333e-01]
[ 6.66666667e-01 1.00000000e+00 -6.66666667e-01]]
True
True
[[-3.00000000e+00 -3.00000000e+00 3.33066907e-16]
[-1.00000000e+00 -3.00000000e+00 1.00000000e+00]
[-2.00000000e+00 -3.00000000e+00 2.00000000e+00]]
求解线性方程组
- numpy.linalg.solve(a, b) 求解线性方程组或矩阵方程。
【例】求解线性矩阵方程
# x + 2y + z = 7
# 2x ‐ y + 3z = 7
# 3x + y + 2z =18
import numpy as np
A = np.array([[1, 2, 1], [2, -1, 3], [3, 1, 2]])
b = np.array([7, 7, 18])
x = np.linalg.solve(A, b)
print(x) # [ 7. 1. ‐2.]
x = np.linalg.inv(A).dot(b)
print(x) # [ 7. 1. ‐2.]
y = np.allclose(np.dot(A, x), b) #带回原方程,验证一下是否有AX=b
print(y) # True
[ 7. 1. -2.]
[ 7. 1. -2.]
True