OpenCV-Python官方文档学习笔记(上)
整理自OpenCV-Python官方文档
-
一. OpenCV-Python Tutorials
- 1 安装及验证
- 2 图片读写,展示
- 3 视频读写,展示
- 4 绘图功能(绘制几何形状:线、圆、椭圆、矩形、文字)
- 5 鼠标事件画笔
- 6 轨迹栏作为调色板
- 7 核心操作方法
- 8 图像处理
* 8.1 颜色空间
* 8.2 阈值化
* 8.3 几何变换
* 8.4 平滑图像
一、OpenCV-Python Tutorials
Python由于其简单性和代码可读性,它在短时间内变得非常流行。
另一个是强大的Numpy,Scipy,Matplot等使其使用非常方便,并且易于C,C++的扩展;
OpenCV在机器学习,计算机视觉等领域的算法支持很多;
1. 安装及验证
安装可参考:
https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_setup/py_setup_in_windows/py_setup_in_windows.html
验证安装
python -c "import cv2"
2. 图片读写,展示
- cv2.imread(“imager.jpg”,cv2.IMREAD_COLOR) 图片路径,读图方式【cv2.IMREAD_COLOR或者1:加载彩色图,忽略透明度,默认模式;cv2.IMREAD_GRAYSCALE或者0: : 灰度图;cv2.IMREAD_UNCHANGED或者-1:BGR+alpha透明度4通道图;】
- cv2.imshow(“image”,image) 窗口名称,图片array
- cv2.imwrite(“image.jpg”,image) 保存的图片路径名称,图片array
3. 视频读写,展示,捕获窗口
使用笔记本电脑的内置网络摄像头,捕获实时视频流的每一帧,并写入文件
- cv2.flip(frame,0) 翻转图像 1水平翻转,0垂直翻转,-1水平垂直翻转
- cv2.VideoCapture() 内置网络摄像头——视频捕获
- cv2.VideoWriter() 视频帧写入类
# 视频写入
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
# 定义编码器codec 初始化视频写入类对象
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output.avi', fourcc, 20.0, (640, 480))
while (cap.isOpened()):
ret, frame = cap.read()
if ret == True:
# 垂直翻转每一帧图像
frame = cv2.flip(frame, 0)
# 写入翻转后的每一帧
out.write(frame)
cv2.imshow('frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
else:
break
# 释放视频捕获器以及视频写入流
cap.release()
out.release()
cv2.destroyAllWindows()
4. 绘图功能(绘制几何形状:线、圆、椭圆、矩形、文字)
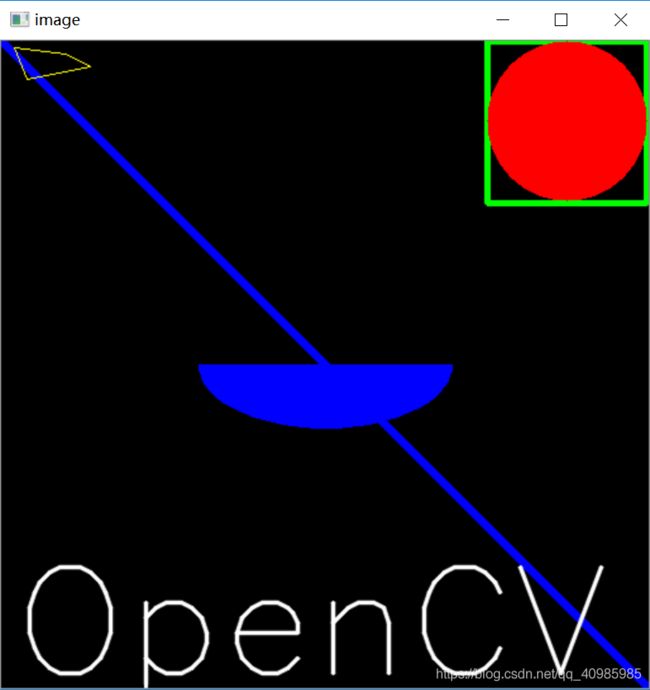
# 绘图功能(绘制几何形状:线、圆、椭圆、矩形、文字)
import numpy as np
import cv2
# 创建一个黑色的图片
img = np.zeros((512,512,3), np.uint8)
# 画一条蓝色的线
# 图像,起点,终点,颜色BGR,thickness(线条 -1 实心)
img = cv2.line(img,(0,0),(511,511),(255,0,0),5)
# 矩形
# 图像,起点,终点,颜色BGR,thickness
img = cv2.rectangle(img,(384,0),(510,128),(0,255,0),3)
# 圆
# 图像,圆心,半径,颜色GBR,thickness(-1 实心)
img = cv2.circle(img,(447,63), 63, (0,0,255), -1)
# 椭圆
# 图像,圆心,(长轴长度,短轴长度),旋转开始角度startAngle,旋转结束角度endAngle,0~360标识展示多大的椭圆比例,thickness(-1,实心,否则是线的粗细)
img = cv2.ellipse(img,(256,256),(100,50),0,0,180,255,-1)
# 多边形(一系列的坐标向量)
pts = np.array([[10,5],[20,30],[70,20],[50,10]], np.int32)
pts = pts.reshape((-1,1,2))
# 图像,向量坐标array,True:连成线的封闭多边形 False:只是依次连线并不封闭(起点、终点并未连在一起),颜色BGR
img = cv2.polylines(img,[pts],False,(0,255,255))
font = cv2.FONT_HERSHEY_SIMPLEX
# 文字
# 图像,文字内容,起点,字体,字体大小,字体颜色BGR,thickness字体粗细,线的类型(cv2.LINE_AA 锯齿状)
cv2.putText(img,'OpenCV',(10,500), font, 4,(255,255,255),2,cv2.LINE_AA)
cv2.imshow("image",img)
cv2.waitKey(0)
cv2.destroyAllWindows()
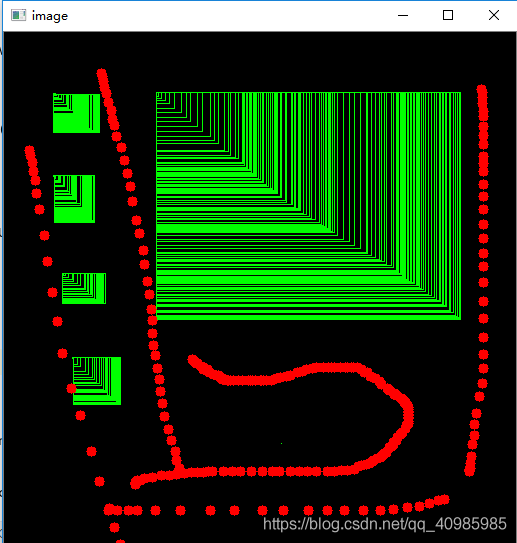
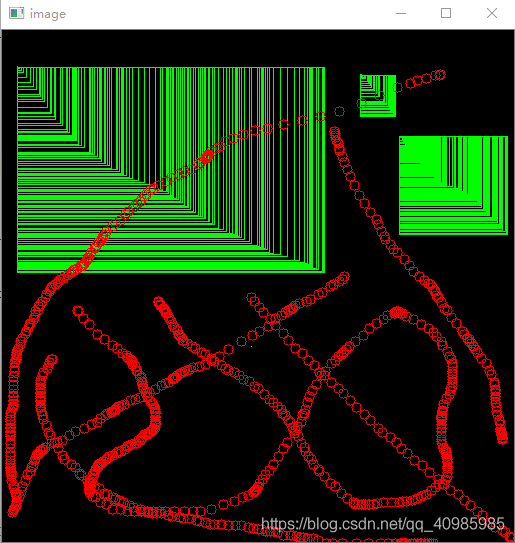
5. 鼠标事件画笔
默认情况下,按下鼠标左键拖动,画绿色的矩形;
按一下m键,再次按下鼠标左键拖动,画半径为5的红色原形。
理解鼠标事件这个例子对于创建和理解一些交互式应用程序(如对象跟踪,图像分割等)将非常有帮助。
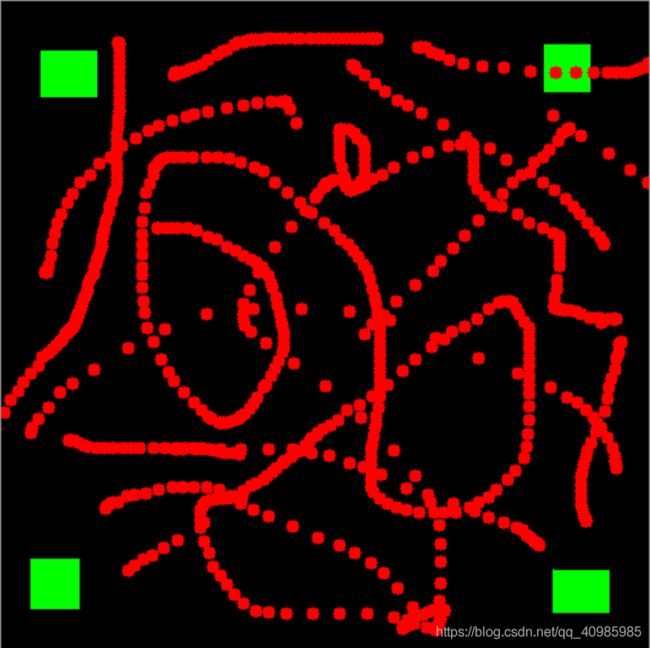 将该例子绘制矩形和圆形参数 thickness调整为非-1,如1变为非实心,将非常有趣;
将该例子绘制矩形和圆形参数 thickness调整为非-1,如1变为非实心,将非常有趣;
import cv2
import numpy as np
drawing = False # true if mouse is pressed
mode = True # if True, draw rectangle. Press 'm' to toggle to curve
ix, iy = -1, -1
# mouse callback function
def draw_circle(event, x, y, flags, param):
global ix, iy, drawing, mode
if event == cv2.EVENT_LBUTTONDOWN:
drawing = True
ix, iy = x, y
elif event == cv2.EVENT_MOUSEMOVE:
if drawing == True:
if mode == True:
cv2.rectangle(img, (ix, iy), (x, y), (0, 255, 0), -1)
else:
cv2.circle(img, (x, y), 5, (0, 0, 255), -1)
elif event == cv2.EVENT_LBUTTONUP:
drawing = False
if mode == True:
cv2.rectangle(img, (ix, iy), (x, y), (0, 255, 0), -1)
else:
cv2.circle(img, (x, y), 5, (0, 0, 255), -1)
img = np.zeros((512, 512, 3), np.uint8)
cv2.namedWindow('image')
cv2.setMouseCallback('image', draw_circle)
while (1):
cv2.imshow('image', img)
k = cv2.waitKey(1) & 0xFF
if k == ord('m'):
mode = not mode
elif k == 27:
break
cv2.destroyAllWindows()
6. 轨迹栏调色板
挪动不同的RGB,会显示不同的颜色
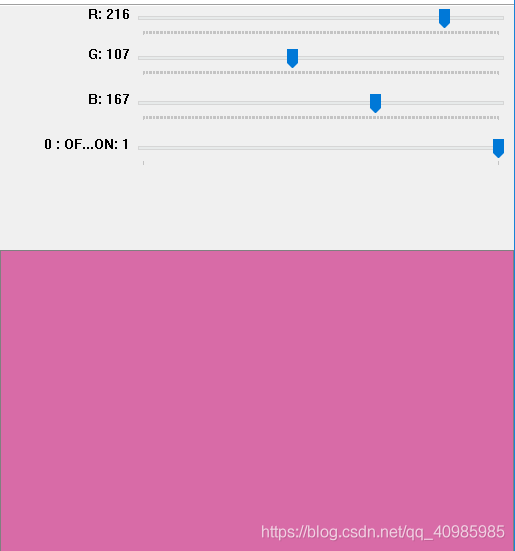
# 调色板
# 创建了一个开关,其中只有在开关为ON的情况下应用程序才能工作,否则屏幕始终为黑色
# 移动RGB 调整自己喜欢的颜色
import cv2
import numpy as np
def nothing(x):
pass
# 创建一个黑色图片,窗口
img = np.zeros((300, 512, 3), np.uint8)
cv2.namedWindow('image')
# 创建轨迹栏显示 RGB 颜色变更
cv2.createTrackbar('R', 'image', 0, 255, nothing)
cv2.createTrackbar('G', 'image', 0, 255, nothing)
cv2.createTrackbar('B', 'image', 0, 255, nothing)
# 创建用于开/关功能的开关
switch = '0 : OFF \n1 : ON'
cv2.createTrackbar(switch, 'image', 0, 1, nothing)
while (1):
cv2.imshow('image', img)
k = cv2.waitKey(1) & 0xFF
if k == 27:
break
# 获取当前轨迹兰的位置
r = cv2.getTrackbarPos('R', 'image')
g = cv2.getTrackbarPos('G', 'image')
b = cv2.getTrackbarPos('B', 'image')
s = cv2.getTrackbarPos(switch, 'image')
if s == 0:
img[:] = 0
else:
img[:] = [b, g, r]
cv2.destroyAllWindows()
7. 核心操作方法
- 访问像素值并对其进行修改(img.item img.itemset())
print(img.item(10, 10, 2)) # 获取红色通道的值
img.itemset((10, 10, 2), 100) # 修改红色通道的值
- 访问图像属性 (img.dtype img.shape)
- 设置图像区域(ROI)Numpy切片方法
- 分割通道和合并图像 (split merge,相比索引的方法快一些)
b, g, r = cv2.split(img)
img = cv2.merge((b, g, r))
b = img[:, :, 0] # 索引的方式更快
img[:, :, 2] = 0 # 索引的方式更快
数学运算符(+ - * /)
- openCV加法和Numpy加法之间有区别。OpenCV加法是饱和运算,而Numpy加法是模运算。OpenCV的方法在图像相加更好用一些;
- cv2.threshhold二值化图像
- 图像融合或者透明度方法
cv2.addWeight(img1,alpha,img2,1-alpha,y)
如果直接相加两个图像,它将改变颜色。如果融合它,将获得透明效果。还有一种很优雅的办法:位操作(按位与、或、非、异或(轻松改变某个图像的一块ROI区域)

8. 图像处理
8.1 颜色空间
- cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
- cv2.inRange()
颜色空间的转换:BGR转RGB,BGR转GRAY,BGR转HSV
对象跟踪中最简单的方法:根据HSV颜色空间来提取彩色对象。在HSV中,表示颜色比RGB颜色空间更容易。
颜色HSV空间的获取:
green = np.uint8([[[0, 255, 0]]])
hsv_green = cv2.cvtColor(green, cv2.COLOR_BGR2HSV)
print(hsv_green)
8.2 阈值化
参考我之前的篇博客:cv2.threshhold二值化图像
阈值化、自适应阈值化、自适应高斯滤波后阈值化
高斯滤波去掉了高频的噪点波,后效果更好
自适应性高斯滤波不需要手动设置阀值,使用更简单
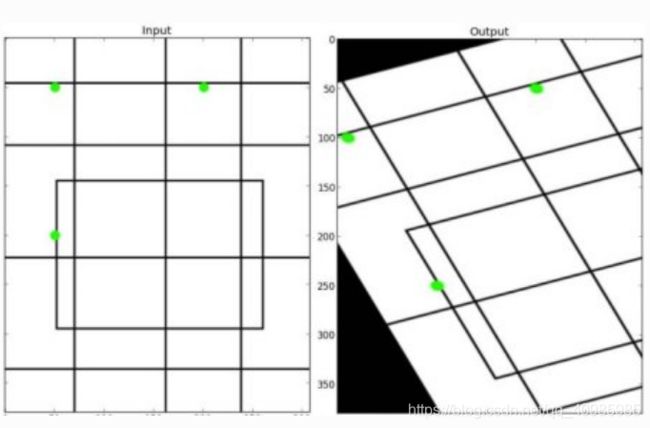
8.3 几何变换
将不同的几何变换应用于图像,例如平移,旋转,缩放,仿射变换(Affine Transform),透视变换(Perspective Transform)等。
在放射变换中,原始图像中的所有平行线在输出图像中仍将平行。为了找到变换矩阵,我们需要输入图像中的三个点以及它们在输出图像中的对应位置。然后cv2.getAffineTransform将创建一个2x3矩阵,该矩阵将传递给cv2.warpAffine。
仿射变换如下:
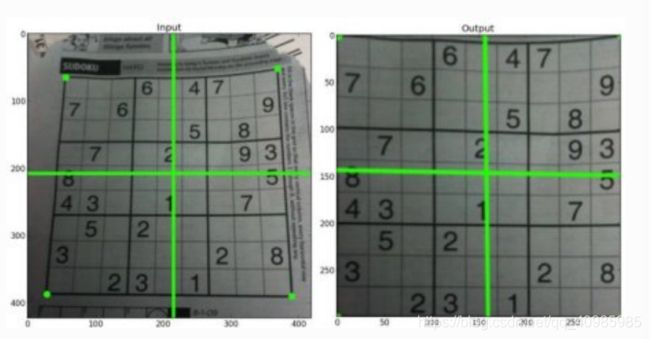
透视变换在光学识别里会用到:
对于透视变换,需要3x3变换矩阵。即使在转换后,直线也将保持直线。要找到此变换矩阵,需要在输入图像上有4个点,在输出图像上需要相应的点。在这4个点中,其中3个不应共线。然后可以通过函数cv2.getPerspectiveTransform找到转换矩阵。然后将cv2.warpPerspective与此3x3转换矩阵一起应用。
透视变换如下图:
8.4 平滑图像
图像滤波/模糊由俩种方式:
- 使用各种低通滤镜模糊图像
- 将自定义滤镜应用于图像(2D卷积)
- 2D卷积核
LPF低通滤波,有助于消除噪声或模糊图像。
HPF高通滤波,过滤器有助于查找图像的边缘。cv2.filter2D()
- 平滑图像
-
均值滤波(直接取平均值,会模糊边缘)
-
高斯滤波(比均值滤波效果好,可以高效去除高频噪音。利用邻域像素取中值,也会使边缘模糊,得到一个可能在原始图像中并不存在的像素值)使用更广泛一些;
-
中值滤波(相比高斯滤波,也基于邻域像素取中值,区别:中值一定存在于原像素中)
-
双边滤波(效果好,速度比较慢,是高斯滤波的优化,其他部分采用高斯滤波,边缘多加了一些逻辑,使得边缘也不模糊)