角色寻路之A*算法
在寻路中使用的比较多的,一般是A*算法,比如:
(上面的游戏画面为我以前做的一个RPG游戏的画面,其寻路正是使用了A星算法。)
1.什么是A星算法
A星算法作为启发式搜索算法的一种,其相对于盲目型搜索算法(如广度优先搜索算法和深度优先搜索算法)和半启发式搜索算法(如 Dijkstra算法)来说,不仅有着更强的针对性,而且其效率也要高于以上几种算法。另外,A星算法主要应用在角色类寻路时的路径问题。简单的说,A星算法可以认为是广度优先算法的改进。
2.路径搜索流程
A星算法是解决许多搜索问题的有效算法。标准的A星算法采用的估价函数是:F(n)=G(n)+H(n),其中G(n)表示从起始顶点到当前顶点的距离的实际值;H(n)表示从当前顶点到目标顶点的距离的估算值。两者相加的结果为估价函数的估价值,选择估价值最小的顶点作为下一步要选择的顶点,如此循环运行估价函数从而生成最优路径。
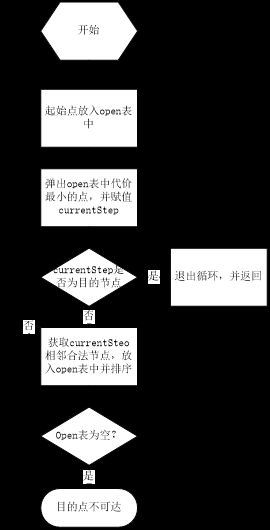
A星算法的搜索流程如下:
①定义OPEN表和CLOSE表,其中OPEN表用来存放未访问过的点,而CLOSE表用来存放已经访问过的点。
②判断OPEN表是否为空,如果是则表示搜索失败,否则从OPEN表中弹出估价值最小的点,并赋值给currentStep。
③判断currentStep是否是目的节点,如果是则直接退出,否则则继续。
④获得currentStep相邻的的节点,并计算其估价值F(n)的大小,并做如下判断:
- 如果该点既不在OPEN表中,又不在CLOSE表中,就直接把该点放入OPEN表中。
- 如果该点已经在OPEN表中,而当前的代价值F(n)小于OPEN表中对应点的代价值的话,则重新设置其父亲为currentStep,并设置其G(n)和F(n)。
- 如果该点已经存在于CLOSE表中,则表示该点已经访问过,则跳过该点。
上述步骤的流程图如下:
上面说的可能比较枯燥,请看下面的动图:
图1
上面的例子为不存在障碍物的寻路过程。
图2
如上图所示,A星算法是把一个场景分成一个个图块后进行寻路的(和图块的形状无关)。在上面的动图中,起始点和行进点为灰色,障碍为黑色,结束点为稍微透明的白色。当A星算法找到目的节点后,从目的节点反序到开始节点的路径即为最短路径。
其中,每一个矩形都包含以下几个属性:左下角是既定代价G(n),右下角为估算代价H(n),左上角为总代价F(n)。
从图2可以看到尽管A星算法找到了起始点到终点的路径,但是不免有些太蠢了些。很明显可以看到有些节点不没必要遍历,这种情况跟我的实现有一定的关系。在演示程序中,我使用的是vector数组,对节点排序使用的是插入排序,而插入排序是稳定排序,这也就导致了上面那种情况的发生(对于上述情况,没必要特别地更换排序算法)。
3.代价评估选择
从上述描述中可以了解到,F(n)的大小取决于G(n)和H(n),G(n)作为既定代价,它表示从开始点到当前点的代价;H(n)则表示从当前点到目的点的代价。它们的计算有以下选择:
①曼哈顿距离
曼哈顿距离允许四方向移动,它是在坐标系的两个点的x、y坐标的差的绝对值之和,其计算的是当前点通过水平和竖直两种方式到达目的点的代价。假设起始点为VS(start_x,start_y),当前点为VC(current_x,current_y),目的点为VE(end_x,end_y)。则其:
G(n)=abs(current_x - start_x) + abs(current_y - start_y)。
H(n)=abs(end_x - current_x) + abs(end_y - current_y)。
相关内容如图:
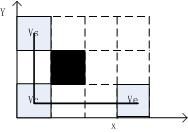
图 曼哈顿距离坐标轴显示
②对角线距离
对角线距离允许八方向移动,它的特点是允许对角线方向移动和水平、竖直方向移动两种移动方式。假设起始点为VS(start_x,start_y),目的点为VE(end_x,end_y)。水平、竖直移动的代价为10,对角线移动的代价为14(10√2≈14),则相关数据如图所示:
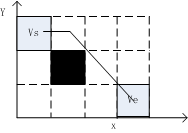
图 对角线距离坐标轴显示
另外还有欧几里得距离等等。
本例中使用的为曼哈顿距离。
4.伪代码实现
在进行搜索时,这里的A星算法默认目的点可达。
//搜索过程
ShortestPathStep* AStar::parse(const Point& fromTile,const Point& toTile)
{
//设置开始和结束位置
//方向数组 下、左、右、上
//vector dirs(Down,Left,Right,Up)
//把开始位置插入到OPEN开放列表中
m_openSteps.push_back(from);
do{
//弹出数组头部元素
ShortestPathStep* currentStep = m_openSteps.front();
m_openSteps.erase(m_openSteps.begin());
//添加到封闭列表CLOSE表中,表示已经访问
m_closeSteps.push_back(currentStep);
//如果当前路径就是目的地,搜索完成,退出循环
if (currentStep->getTilePos().equals(toTile))
{
//清除容器,设置pTail,并退出循环
}
//对四方向进行遍历
for (const auto& dir : dirs)
{
Point tilePos;
Direction oppositeDir;
if (it == m_openSteps.end())
{
//目标合法才添加 目标为toTile时,不进行通过检测
if (isValid(tilePos) && isPassing4(currentStep->getTilePos(), dir)
&& (tilePos == toTile || isPassing(tilePos)) && isPassing4(tilePos, oppositeDir))
{
//初始化step并
//插入到开放列表中
insertToOpenSteps(step);
}
}
else
{
//当前花费小于原来的花费,覆盖其值
//...
}
}
}
}
} ShortestPathStep为一个表示坐标点的类,除了包含坐标外,还包含了计算F值的函数。
OPEN表和CLOSE表都定义为动态数组,使用了STL的vector。另外,A星算法每一次弹出OPEN表中代价最小的值,每插入或者某一点代价改变时都会进行一次排序,以使得OPEN表中对象的代价从小到大递增。
上述代码中,每次都会对currentStep相邻的四个方向进行判断,如果既不在OPEN表中,又不在CLOSE表中,且该点有效(一般指不越界)时,会把该点的”父亲”设置为currentStep,并添加到OPEN表中。上述代码会一直循环直至OPEN表中为空或者找到目的点,如果OPEN表为空,则表示未找到从起始点到目的点的路径;否则则表示寻路成功,它返回的是一个反向链表,还需要一个翻转操作才能提供给角色对象寻路使用。
5.算法评价
Dijkstra算法作为一种典型的寻路算法,它的具体搜索流程是:从起点开发,依次对当前节点的相邻未访问节点的权重进行更新,直至图完全遍历为止,Dijkstra算法在每添加一个节点的时候,都会尝试绕过该点,并把权值做比较,这样做的好处是得出的权值一定是最优的,但是相应地,代码的空间复杂度和时间复杂度则大大提升。
A星算法作为启发式算法的一种,相对于半启发式寻路算法如Dijkstra算法和盲目型寻路算法如DFS和BFS算法来说,A星算法具有更强的针对性和效率性。不过标准的A星算法在搜索的路径过于庞大时,寻路效率会变得很低。
另外,A星算法默认情况认为开始点和结束点是存在通路的,如果当不存在通路时,A星算法会遍历直至整个地图全部访问为止!
死路如上图所示。
6.改进
1)A星算法中的死路避免
当点击的目的点与起始点不存在通路的时候,标准A星算法会遍历整个地图之后,才会知道目的点不可达,然后返回空值,而此时的角色会停在原地;并且如果地图足够大的时候,会导致主程序卡顿。解决办法:
(1)设置A星算法最大循环次数,使得当此循环超过该值后就默认为目的点不可达。这么做的好处在于当目的点不可达时会节省时间和空间,而它的缺点也很明显,它可能会使得本应该可达的但是路径很长的目的地,而搜索失败。
(2)在瓦片地图中先设置一个值,来标识不同区域是否可通,假设一个地图分为两个区域,为区域1和区域2,而不同区域之间不存在通路,则在点击目的点后就可以进行如下判断:如果目的点和开始点处于同一区域时,则这两点之间必定存在通路,直接寻路即可;如果不在同一区域,则找到目的点附近的与起始点处于同一区域的点,然后进行寻路即可[10]。这么做的优点既可以完整寻路,又能避免在点击不可达时,角色不作为的问题;其弊端则需要在地图中特定设置标识,且额外增加了寻找附近目的地的代价。本课题选择使用了该方法,此方法是由论文“手机角色扮演游戏引擎的设计与实现”中提到的一个思路而得到的实现。

角色所在的区域为0,上图还有区域4和区域5,不同区域表示一定不可达到, 故可在进行A星寻路算法之前先判断区域是否相同,如果相同,则必然为相通。
参考文章:
如何在Cocos2D游戏中实现A*寻路算法 https://blog.csdn.net/mydo/article/details/49975873