VS2017+PCL1.8.1环境配置+代码测试(超详细!!Win 10)
VS2017+PCL1.8.1环境配置+代码测试(Win 10)
文章目录
- VS2017+PCL1.8.1环境配置+代码测试(Win 10)
-
- 1 准备工作
-
- 1.1 Vs2017的获取与安装 。
- 1.2 PCL-1.8.1-AllInOne-msvc2017-win64.exe及其对应PDB文件 pcl-1.8.1-pdb-msvc2017- win64.exe的获取。
- 2 PCL安装
-
- 2.1 PCL-1.8.1-AllInOne安装
- 2.2 添加pdb文件
- 3 添加环境变量
- 4 配置pcl 1.8.1属性表(Debug版本)
-
- 4.1 创建属性表
- 4.2 VC++目录/包含目录(以实际安装目录为准)
- 4.3 库目录
- 4.4添加vtk_lib文件
- 5 代码测试
-
- 5.1 创建.cpp文件
- 5.2 测试代码
- 5.3 测试结果
- 6 异常处理
关于PCL点云处理的更多内容,请参考另一位博主“点云侠“,写的很好
https://blog.csdn.net/qq_36686437
1 准备工作
1.1 Vs2017的获取与安装 。
1.2 PCL-1.8.1-AllInOne-msvc2017-win64.exe及其对应PDB文件 pcl-1.8.1-pdb-msvc2017- win64.exe的获取。
相关文件可以自行下载
链接:https://pan.baidu.com/s/1kLJNW5OfwHv-1ZNi7FcMxg
提取码:pdx6
2 PCL安装
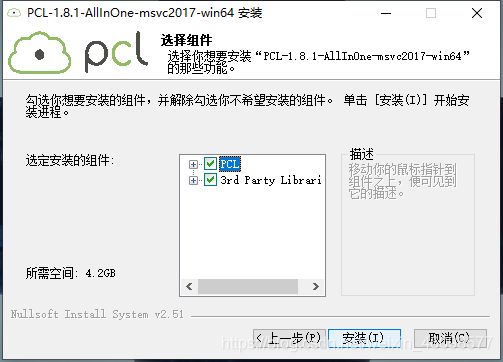
2.1 PCL-1.8.1-AllInOne安装
1) 右键选择PCL-1.8.1-AllInOne-msvc2017-win64.exe,以管理员身份运行

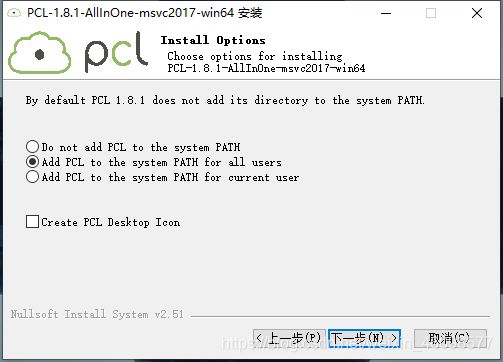
2)选择第二项“Add PCL to the system PATN for all users”
3)更改安装目录,建议使用英文目录

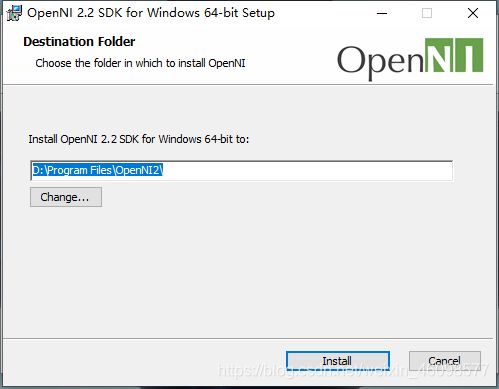
4)安装过程中会进行OpenNI 2.2 SDK的安装,选择路径安装即可(有人建议安装在PCL 1.8.1\3rdParty\OpenNI2目录下)

2.2 添加pdb文件
将pdb文件解压,把文件夹中的内容(20个项目)复制到PCL目录的bin文件夹下(D:\Program Files\PCL 1.8.1\bin)

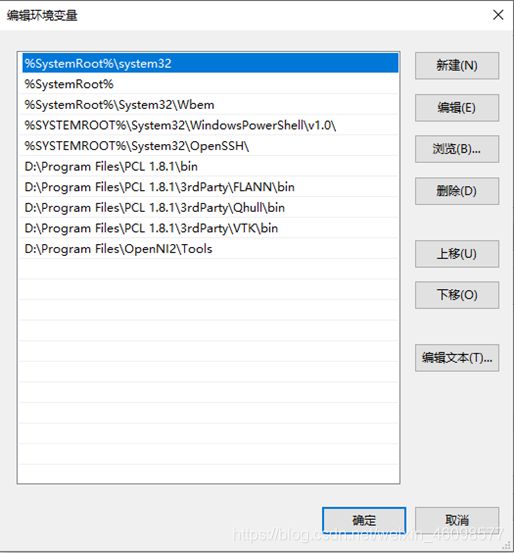
3 添加环境变量
右键“此电脑->属性->高级系统设置->高级->环境变量”
将以下内容依次新建到系统变量Path中(Win10)
D:\Program Files\PCL 1.8.1\bin
D:\Program Files\PCL 1.8.1\3rdParty\FLANN\bin
D:\Program Files\PCL 1.8.1\3rdParty\Qhull\bin
D:\Program Files\PCL 1.8.1\3rdParty\VTK\bin
D:\Program Files\OpenNI2\Tools
需要注销或者重启
4 配置pcl 1.8.1属性表(Debug版本)
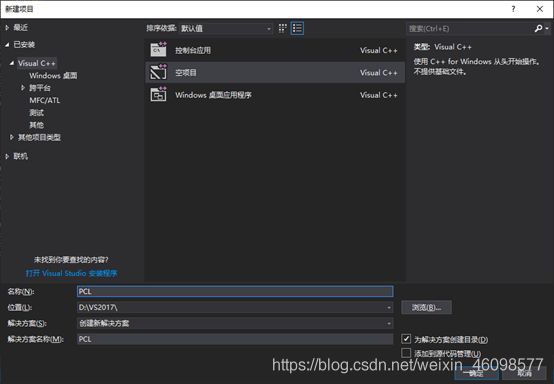
4.1 创建属性表
1) 打开vs2017点击左上角“文件->新建->新建项目->空项目”
2)选择“属性管理器->Debug | x64”,右键“添加新项目属性表”(一劳永逸,以后创建新项目时直接调用即可,不必重新配置)
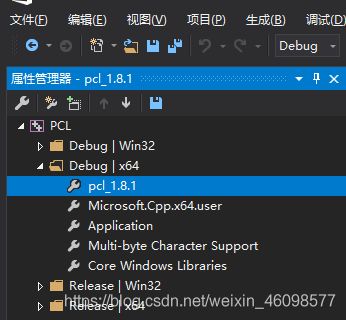
3)双击新建好的属性表,进入下一步。
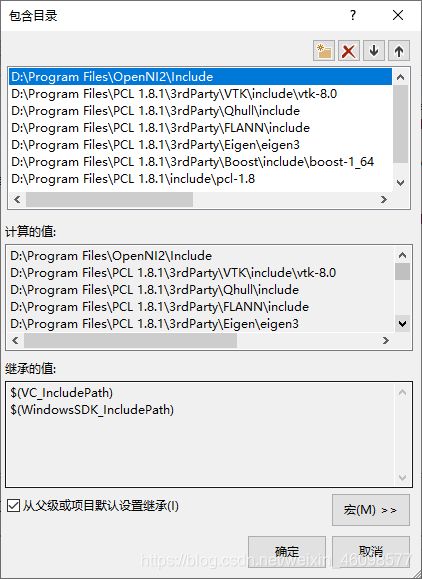
4.2 VC++目录/包含目录(以实际安装目录为准)
将以下路径添加到“通用属性->VC++ 目录->包含目录”中
D:\Program Files\PCL 1.8.1\include\pcl-1.8
D:\Program Files\PCL 1.8.1\3rdParty\Boost\include\boost-1_64
D:\Program Files\PCL 1.8.1\3rdParty\Eigen\eigen3
D:\Program Files\PCL 1.8.1\3rdParty\FLANN\include
D:\Program Files\PCL 1.8.1\3rdParty\Qhull\include
D:\Program Files\PCL 1.8.1\3rdParty\VTK\include\vtk-8.0
D:\Program Files\OpenNI2\Include
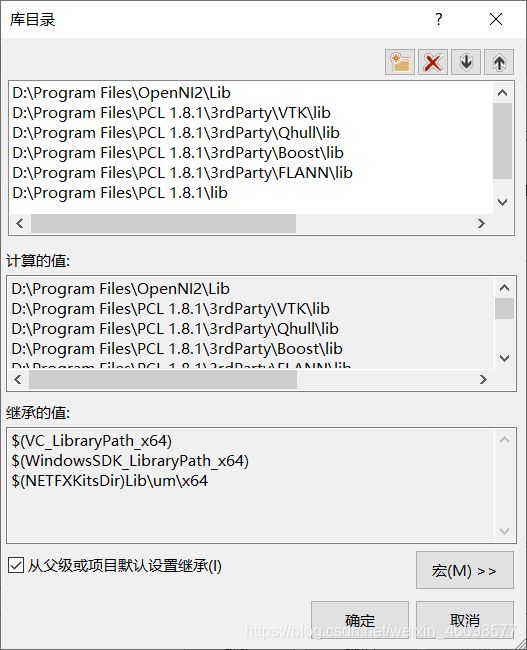
4.3 库目录
将以下ib路径添加到“通用属性->VC++ 目录->库目录”中
D:\Program Files\PCL 1.8.1\lib
D:\Program Files\PCL 1.8.1\3rdParty\FLANN\lib
D:\Program Files\PCL 1.8.1\3rdParty\Boost\lib
D:\Program Files\PCL 1.8.1\3rdParty\Qhull\lib
D:\Program Files\PCL 1.8.1\3rdParty\VTK\lib
D:\Program Files\OpenNI2\Lib
4.4添加vtk_lib文件
打开”链接器->输入->附加依赖项“,添加vtk_lib文件
debug版本的vtk文件已经在百度网盘中给出

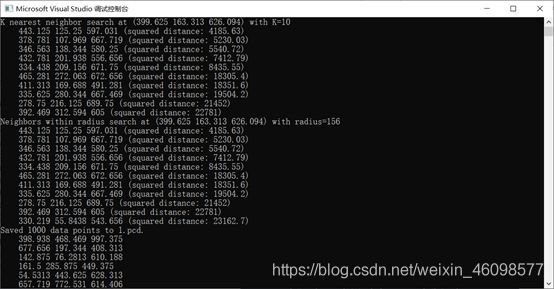
5 代码测试
以kd-tree作为测试代码,包括了点云生成,kd-tree的创建及搜索,保存生成的点云及可视化
5.1 创建.cpp文件
选择“源文件”,右键“添加->新建项”,建立C++文件.cpp
5.2 测试代码
#include 5.3 测试结果
可视化点云,为一立方体
由于点云坐标偏离坐标原点,默认显示如下
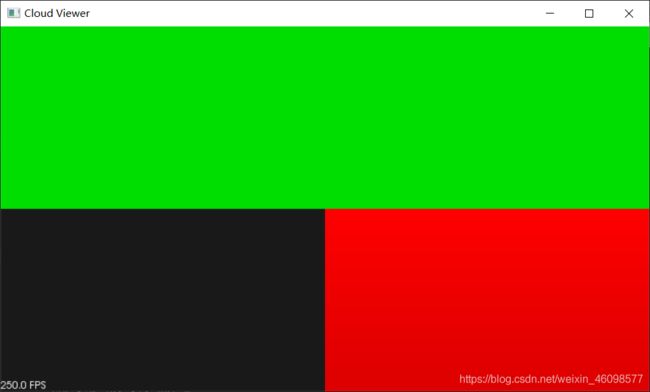
此时,通过滑动滚轮缩小点云,并长按滚轮拖动即可得到如下显示

6 异常处理
配置完成后可能会出现以下异常
异常1:
pcl 1.8.1\3rdparty\flann\include\flann\util\serialization.h(484): error C4996: ‘fopen’: This function or variable may be unsafe. Consider using fopen_s instead. To disable deprecation, use _CRT_SECURE_NO_WARNINGS.
解决办法:
C/C++ 预处理器 预处理定义,添加 _CRT_SECURE_NO_WARNINGS
异常2:
C3861: “pop_t”: 找不到标识符

解决办法:
修改打开的dish.h文件,将503行的“typedef unsigned long pop_t”移到“#if GNUC”前面一行(往上翻几行就能看到)
异常3:
C4996 ‘std::fpos<_Mbstatet>::seekpos’: warning STL4019
错误 C4996 ‘std::fpos<_Mbstatet>::seekpos’: warning STL4019: The member std::fpos::seekpos() is non-Standard, and is preserved only for compatibility with workarounds for old versions of Visual C++. It will be removed in a future release, and in this release always returns 0. Please use standards-conforming mechanisms to manipulate fpos, such as conversions to and from streamoff, or an integral type, instead. If you are receiving this message while compiling Boost.IOStreams, a fix has been submitted upstream to make Boost use standards-conforming echanisms, as it does for other compilers. You can define _SILENCE_FPOS_SEEKPOS_DEPRECATION_WARNING to acknowledge that you have received this warning, or define _REMOVE_FPOS_SEEKPOS to remove std::fpos::seekpos entirely.
解决办法:
VS其实在加粗部分已经给出了解决该错误的办法,具体操作为
C/C++ 预处理器 预处理定义,添加 _SILENCE_FPOS_SEEKPOS_DEPRECATION_WARNING
应用并确定,重新调试运行(我到这就已经调试成功了)
若还有问题,再添加_REMOVE_FPOS_SEEKPOS
若还有问题,尝试 C/C++ 常规 SDL检查设置为“否”
目前未遇到其他异常,如出现其他异常请检查以上步骤是否执行正确,或者参考其他博主的文章