opendrive高精度地图_【自动驾驶】运动规划丨知识分享丨高精度地图
高精度地图的数据信息
轨迹规划模块中,需要基于高精度地图计算本车当前位置,障碍物在地图上基于参考线的坐标。因此,需要了解高精度地图为运动规划提供哪些具体参数信息。
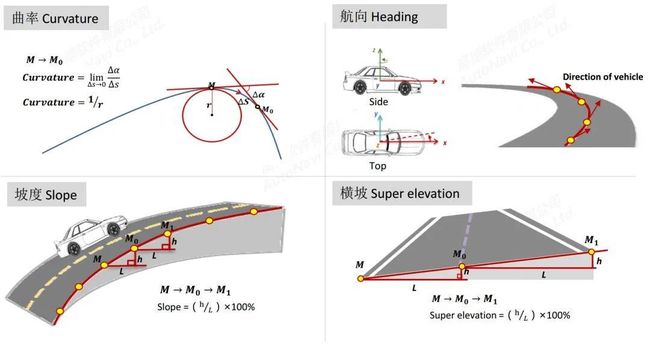
高精度地图可以为无人车提供的某些先验信息。包括道路曲率、航向、坡度和横坡角。这些信息对于无人车的安全性和舒适性都至关重要。
开发者说 | 看不见的“传感器”——高精度地图mp.weixin.qq.com
高精度地图的重要性
L3的定义解读为:以高精地图数据为主,以感应器数据为辅,可以实现法定限速内全速域、全路况的自动驾驶,才是真正的L3级别自动驾驶。只能实现部分速域(如长安L3的0-40KM/h)或依靠道路标线识别的产品,严格来说只能算是升级版的L2级别自动驾驶。
在SAE的分级体系中,L0至L2为低等级的驾驶系统,而L3至L5为高级自动驾驶系统。在L2到L3的跨越中,最为重要的就是环境的监控主体从驾驶员变为了系统。只有当系统能够自动地探查与分析附近区域的状况时,高阶的自动驾驶才能成为可能。
需要说明的是,这里的环境监控主体不仅需要持续不断地获取汽车周边的环境信息,更重要的是根据信息进行驾驶环境安全状况的判定。因此仅仅拥有夜视(Night Vision)、交通标志识别(Traffic Sign Recognition)等功能并不代表环境监控主体为系统。
因此,仅仅升级L2自动驾驶的摄像头与雷达,已经不能满足系统接管汽车时对环境监控的需求,直到高精地图的出现才解决了这个问题。高精地图对于L3自动驾驶的重要性可以体现为4点:
(1)提供精准度更高更安全的地图
要让交通工具自己拥有可以做出行为判断的超级大脑,这就对地图精准度要求极高,定位的偏差会造成系统无法获取准确车道定位,在转向、变道等情况下可能发生安全风险。普通的导航地图只能为驾驶员提供道路信息,而高精地图则专为自动驾驶而生。我们日常所使用的电子地图,都是基于商用GPS,精度为5米左右,而高精地图定位精度达到0.1m,直接服务于智能驾驶决策控制器

(2)在恶劣天气下保障安全
自动驾驶安全性常常受到恶劣天气的威胁,例如光线、浓雾、雨雪等。这种情况下传感器受到影响甚至失灵。高精地图的优势在于可以弥补传感器数据缺失,利用高精地图数据对前方1km的道路情况进行补充。无论是在日常驾驶还是浓雾环境,高精地图都能更精确、全面地感知前方路况,行车安全性得到更高保障。

(3)高速过弯时获取路况信息
当车辆处在高度过弯状态时,由于车载传感器的局限性,无法对弯道后路况进行提前监测,这时候自动驾驶系统就会将自动驾驶回归于人。高精地图的优势就显现出来了。有了高精地图后,可提前获取前方道路的限速、弯道曲率等信息,为车辆提供超视域的路径规划和决策依据,可安全舒适的通过。

(4)高效静态物体判断力
搭载高精地图后,自动驾驶能让监测系统更加智能,提前去除路灯、标志牌等固有静态物体,让资源集中在动态物体监测,这无疑增加了系统运行效率、提高了传感器监测精度、提升了自动驾驶安全性。以上四点对于实现环境监控而言都是至关重要的。当前全球主流汽车的自动驾驶水平普遍在L1到L2级别,而没能广泛实现自动驾驶技术的跨越,很大程度上就是因为高精地图的缺失。可以说,高精地图是L3及以上自动驾驶的关键钥匙,离开了高精地图,高阶自动驾驶只能是“空中楼阁”。
什么才是真正的L3自动驾驶?mp.weixin.qq.com
高精度地图的格式
文章来源:
自动驾驶中基于车道线的高清制图方法回顾mp.weixin.qq.com
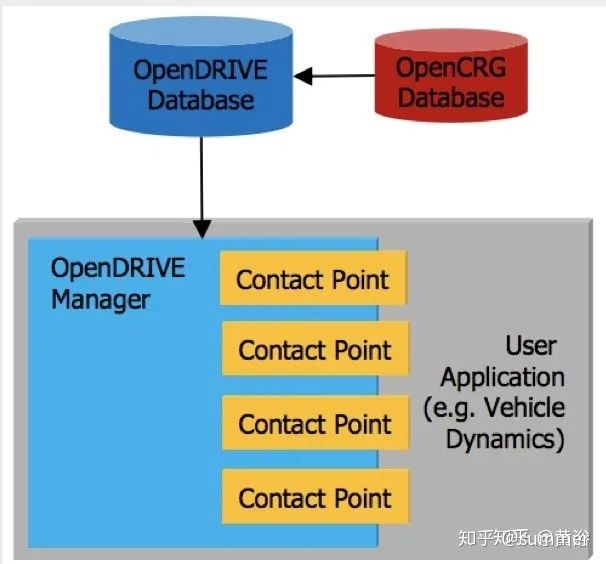
在开始引入之前,先提一下两个地图格式:1. OpenDrive
一种逻辑描述道路网的开源格式,主要在仿真器领域使用。其中OpenCRG是路面特性描述格式。
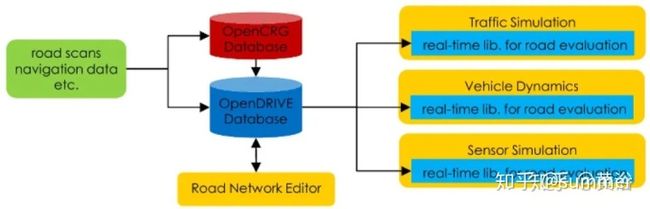
OpenDRIVE Manager (OdrManager) 管理如何读取数据。
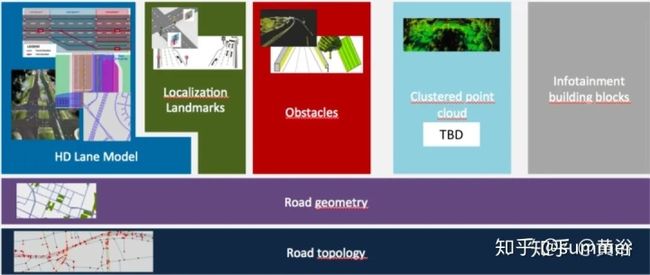
2. NDS:Navigation Data Standard
汽车业导航数据库标准化的格式。下图是NDS的HD Map层:
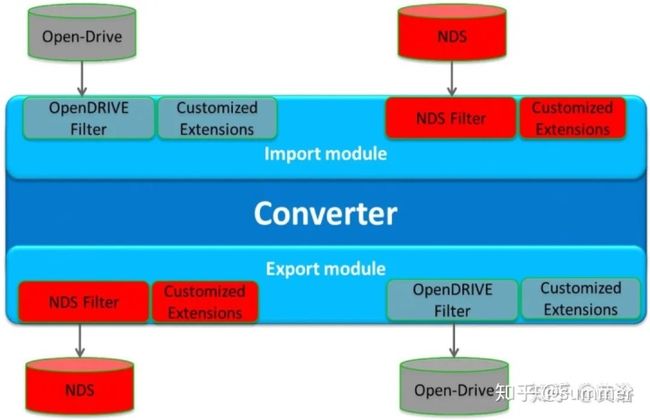
二者之间的转换如下图:
地图相关的论文
1. Creating Enhanced Maps for Lane-Level Vehicle Navigation
Enhanced maps(Emaps)定义车道线的拓扑结构,能辅助车辆的车道线级别的定位。在法国,德国和瑞典已经使用。一般车辆定位分三个级别:
- Macroscale: 10米精度,GPS和道路数据库匹配;
- Microscale: 亚米精度,地图不带有绝对坐标;
- Mesoscale: 车道级精度,带绝对坐标的地图;
下图是同一地区的比较:(a) 谷歌地图. (b) 标准地图. (c) 线段,节点和形状点的表示. (d) Emap。
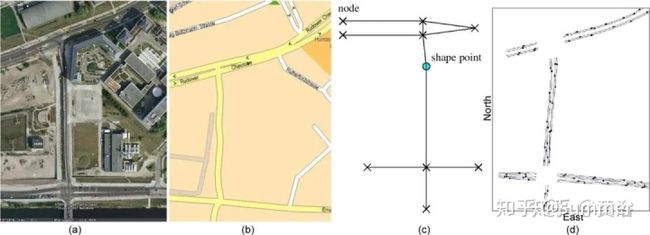
Emap 提供线段的拓扑信息:
- 左/右/前方邻居线段特性;
- 在每个道路的车道线段相对侧向位置;
- 确定线段连接性;短时间建立复杂连接图的能力。
2. Lanelets: Efficient Map Representation for Autonomous Driving
注:德国高清地图公司Atlatec采用Lanelets编辑地图结果。
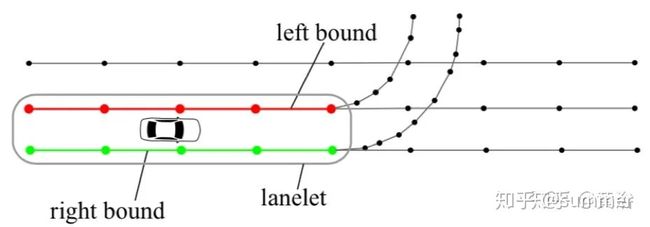
Lanelets记录自动驾驶环境的几何和拓扑特性,Lanelet指那些相互连接的驾驶区域道路线段,主要用于行为层(behavior layer)。
如图所示:Lanelets是有左右边界的折线,以一定精度近似车道几何,确定驾驶方向。
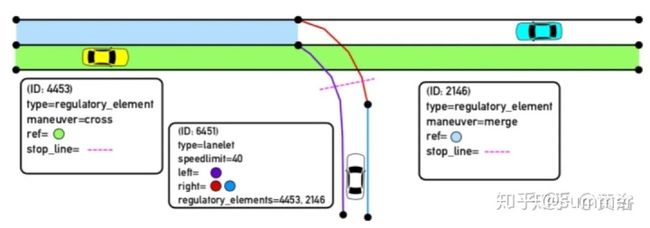
基于连接的Lanelets,路径规划可以执行。下图展示一个Lanelet在汇聚和交叉的状况 (ID: 6451) 。
下图展示的是JOSM,即Java OSM (OpenStreetMap) ,在这个编辑器上重叠的Lanelets。

3.A Smart Map Representation for Autonomous Vehicle Navigation
该论文提出的地图包括三个元素:道路,车道,和车道线。不过,它是基于激光雷达的高清地图,采用ArcGIS制成的。这个地图提供道路级和车道级的规划能力,辅助智能车通过交叉路口的驾驶。
注:ESRI (Environmental Systems Research Institute)是一个国际的,GIS(Geographic information system)软件的提供商,ArcGIS是商用位置服务的软件工具。
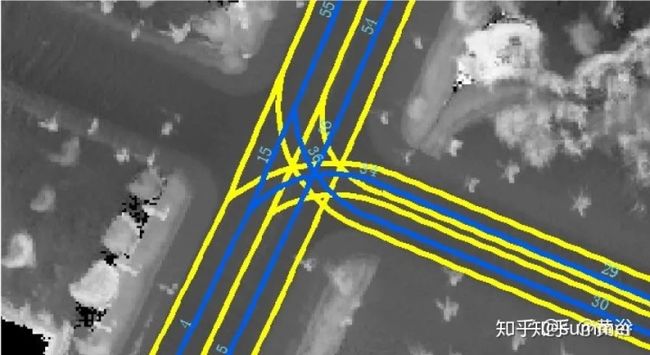
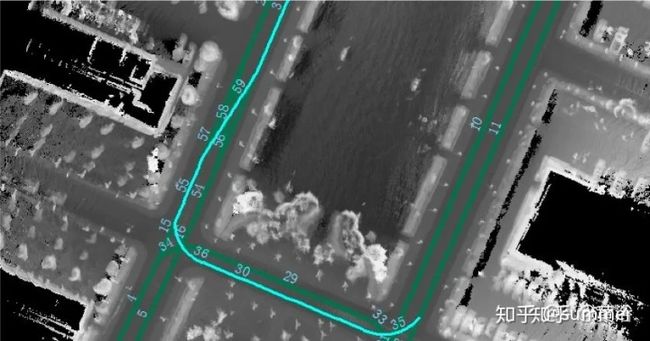
这种地图描述车道网和道路网的拓扑结构,同时给出车道线的几何描述,如上图。车道线级的规划通过路口的例子见下图:[3,59,55,36,30,35]
算法如下:

4.High Precision lane-level road map building for vehicle navigation道路地图的要求是:
- 每个道路分成道路段序列;
- 每个道路段,车道数目不变;
- 每个路段相邻的车道在同一方向是隐含连接的;
- 不同的道路其车道是可以不连接而相交的;
- 每个路段的车道可定义为解析曲线;
- 车道曲线图的精度期望是分米级别。
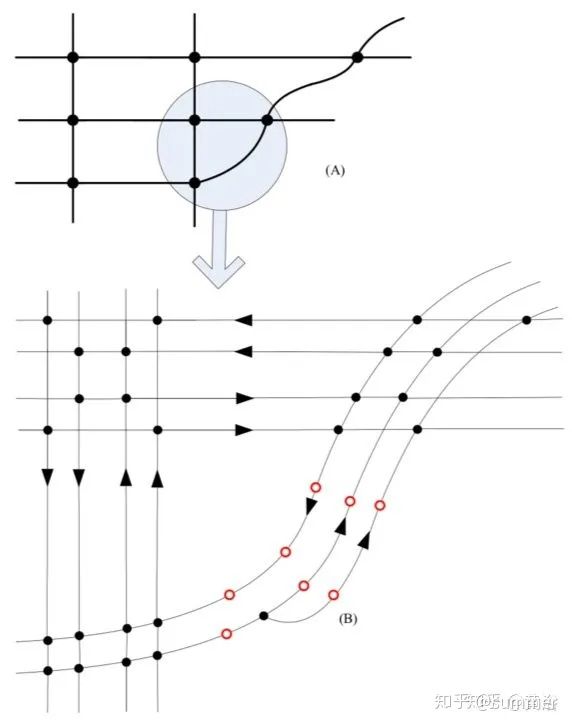
这里采用Cubic Hermite Spline (CHS)描述车道线。基于CHS的分割方法是:道路相交提供一个长路的初始化分解;在两个节点之间假设 (n − 1) 顶点和n 基函数;然后估计顶点位置和切向方向。
看看下面的道路地图例子:(A)“• ”符号相连的道路例子,(B) 道路网的一部分,包括各个路的车道线,红色“⚬”代表节点之间的顶点。
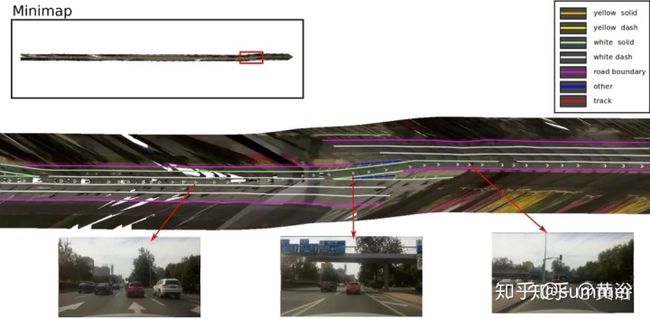
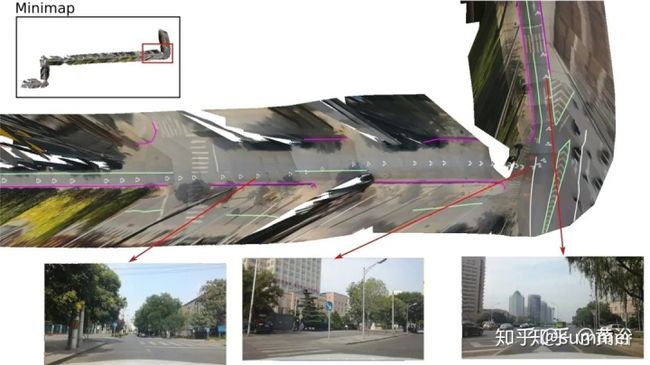
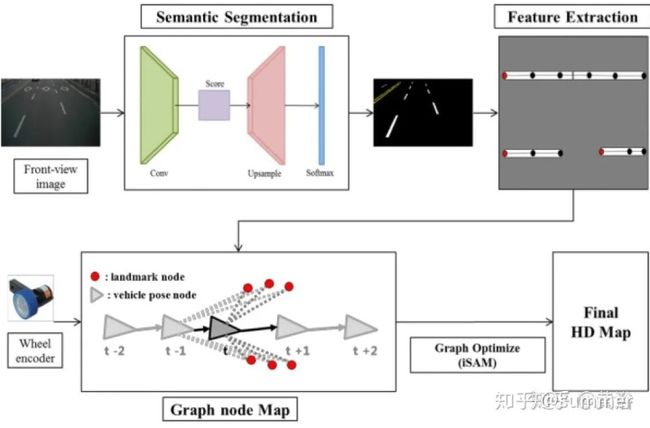
5.Road Lane Semantic Segmentation for High Definition Map
这里提出一个基于车道语义分割的高清地图自动构成方法:采用单镜头,通过FCN检测车道线,然后提取车道特征,用来检测闭环。最后基于图的SLAM生成地图,流程如下图。
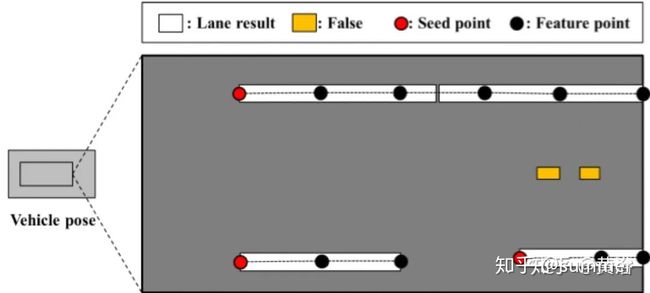
关于特征提取见下图:主要是每个道路线段的key point。
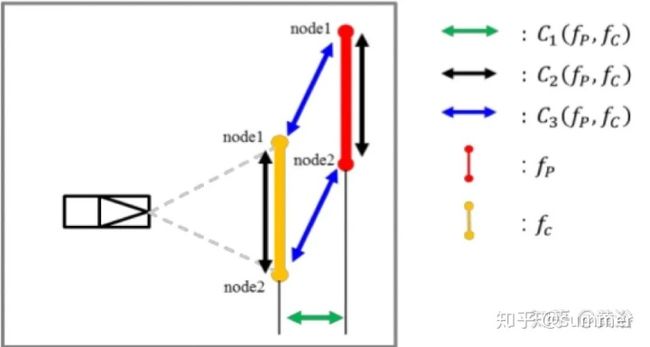
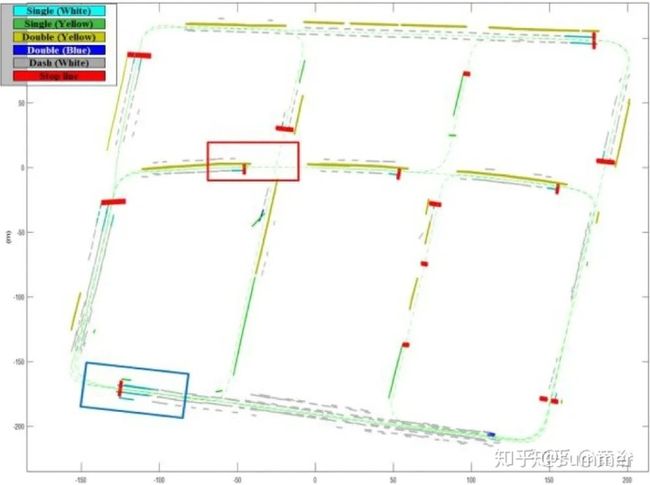
关于闭环的检测参见下图:一般停止线比较适合做定位的landmark,并估计车辆的姿态。
下图是一个多种颜色表示的语义分割结果:(a) 输入,(b)ground truth,FCN(c),SegNet(d), PSPNet(e) 和 颜色意义(f).

下图是高清地图的例子:依次是最终地图,以及蓝色和红色部分的细节放大。


6.Map Management for Efficient Long-Term Visual Localization in Outdoor Environments如图给出的系统示意图:多个车辆定位通过一个移动通信的共享远程地图,“Appearance-based landmark selection”可以从地图检索路标。一旦车辆完成一次驾驶,搜集的数据上传到后端,并入地图更新。随后,后端的“map summarization”保证地图规模,也保证存储容量限制条件。
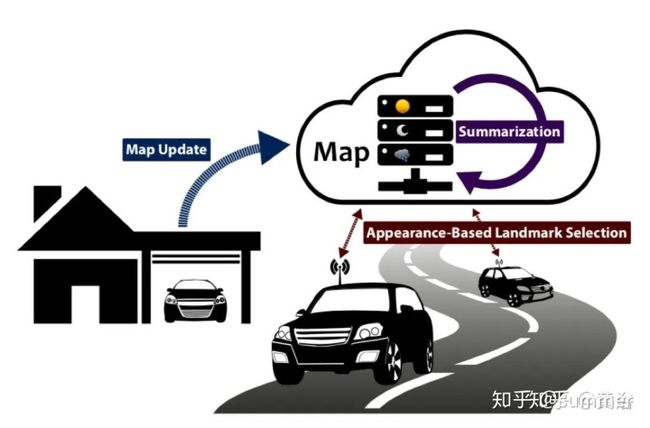
下图是地图更新的流程图:首先新数据需要在地图定位。一旦定位精度过低,就从数据中建立新的路标加入地图中,然后进入summarization降低地图中的路标数目到固定的数目。其他情况下,在定位中所有路标的观测统计会被更新,但不会添加新的路标。

7.Design of a Multi-layer Lane-Level Map for Vehicle Route Planning
建立了一个车辆路径规划的三层车道级别的地图,即road-level-layer, intermediate layer和 lane-level layer。其中lane-level layer的几何由Cubic Hermite Spline 描述,用一组control points 产生车道的几何关系。下图是三层车道级别的地图模型:
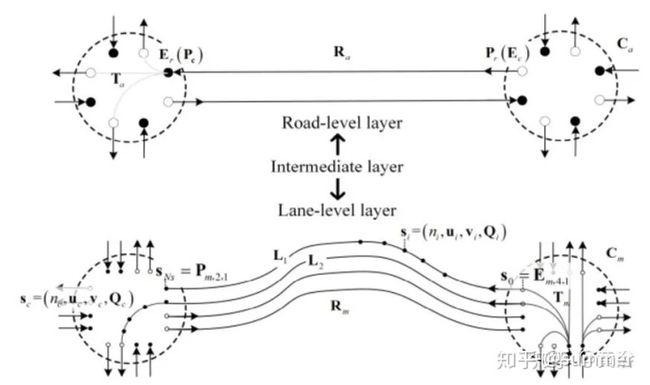
road-level-layer包括道路和交叉路口,可以支持成熟的路径规划算法。intermediate layer 是上下层的桥梁,存储的车道集合之间的相关性可用于路径规划。lane layer 提供了车道级别的细节, 除了车道和交叉路口,还有一些车道线和车道中心线的高清点。
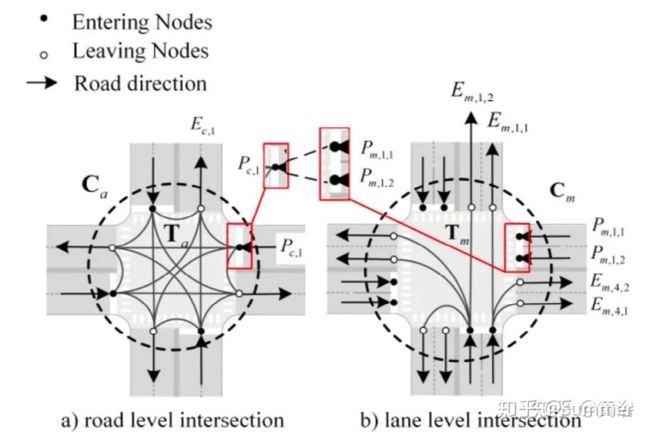
下图是intermediate layer中道路级和车道级的路口信息描述:其中进出路口几个道路之间的拓扑连接描述为traffic matrix形式。
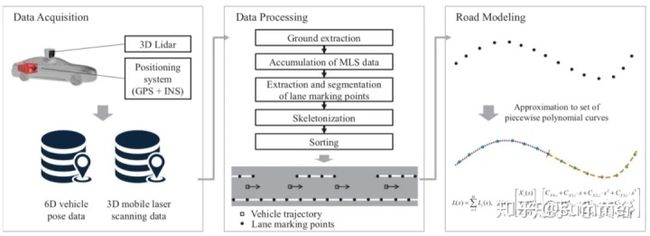
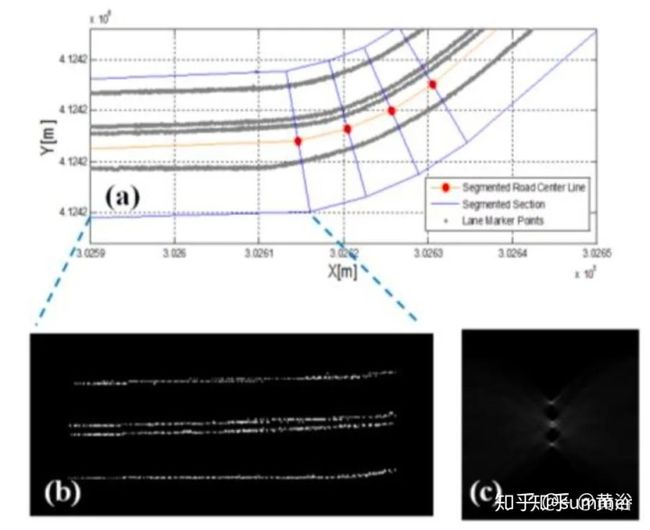
8.Generation of a Precise and Efficient Lane-Level Road Map for Intelligent Vehicle Systems
系统框图如下:包括三部分,数据获取,数据处理和道路建模。
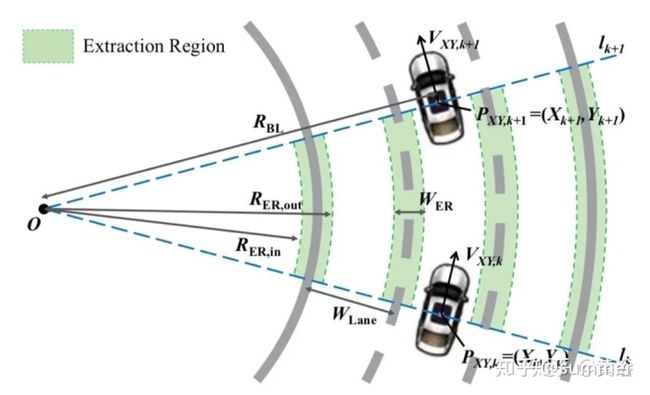
下图是车道线点的提取和聚类:提取区域是车辆的姿态决定的,每个区域提取的点就是marking point。这些被用于道路建模。
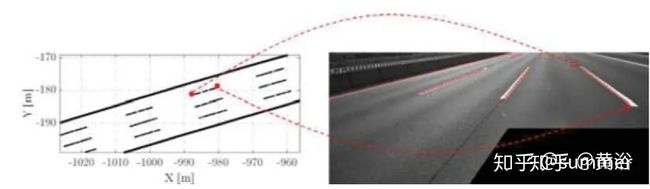
下图是局部地图数据和图像平面之间的转换,其中二者的匹配良好。
注:这篇文章特别,直接从航拍图像建地图。9.Automated Map Generation from Aerial Images for Precise Vehicle Localization
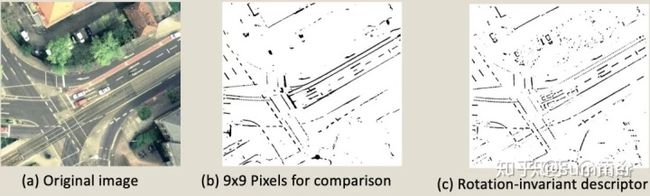
航空图像产生路标地图需要图像分类和路标结合描述的工作。本文提出了一个基于规则的从路标估计车道边界的算法。
下图是路标检测分类:(a) 原始图像 (b) 9x9 HSV 特征向量做比较(c) 提出一种旋转不变性特征向量。
而这个是车道边界的检测:(a) 原始路标. (b) 计算的车道边界 (c) 滤除非车道边界的剩余路标。

注:这里用2-D激光雷达(单线),成本低于一般高清地图所用的多线雷达。10.Lane Map building and Localization for Automated Driving Using 2D Laser RangrFinder
路标识别是建立车道地图的前提。

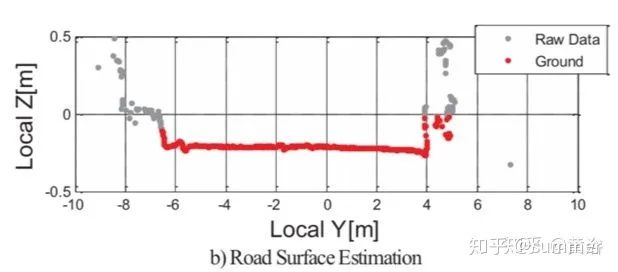
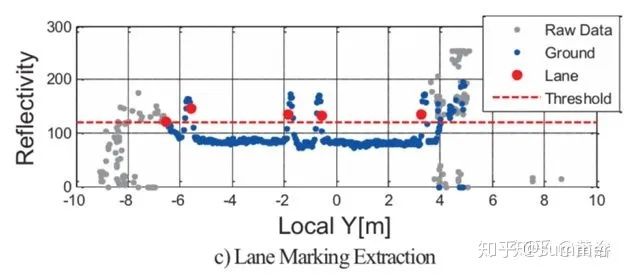
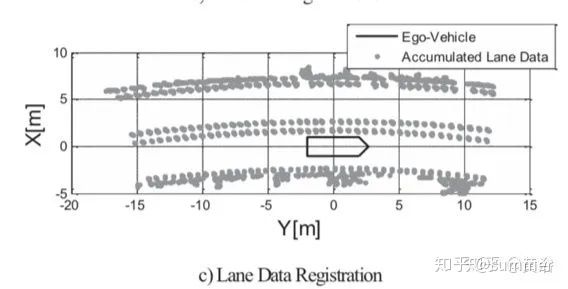
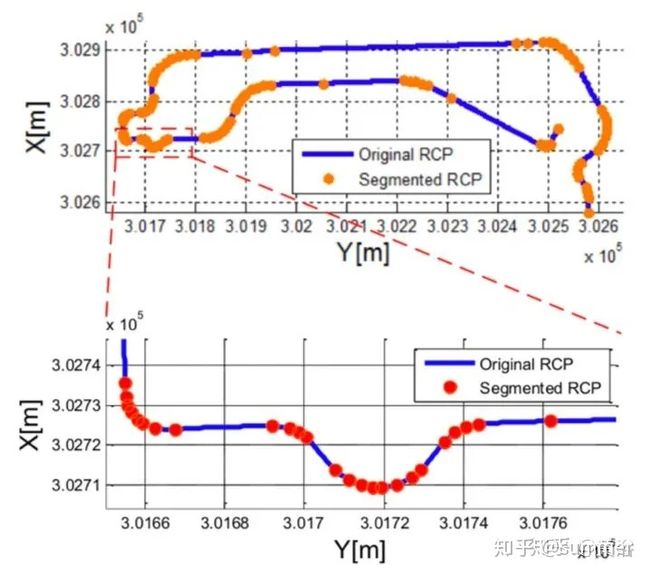
上图是一个车道线识别的例子:激光雷面向地面,180°平扫,最大距离80米,测距5厘米误差;算法要求先做路面估计(折线表示法),车道线通过反射值提取,差分GPS和IMU做数据校准,将车身位置变换到UTM决定坐标系上。车道地图建图就是找到车道。下图是提取车道的例子:首先是道路中线分割出来,采用一种简化的折线段表示,基于Douglas-Peucker算法沿不同方向将中线段分成多个部分,并得到形状点集。最后车道通过Radon transform得到。
其中道路中线分割的例子见下图:
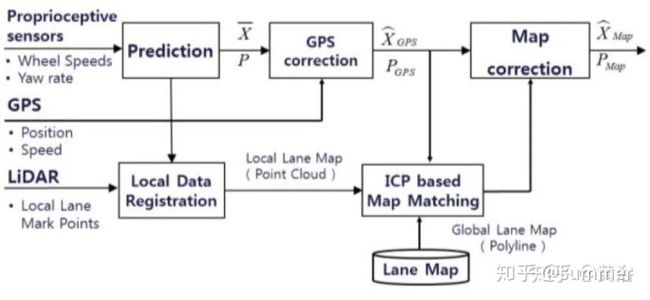
定位重要的是车辆姿态估计,文中采用GPS和激光雷达数据-车道地图的ICP匹配算法实现。车辆姿态数据进入一个卡尔曼滤波器,做递推。下图是车道地图的定位流程图:
下图给出一个定位的例子:

11.LineNet: a Zoomable CNN for Crowdsourced High Definition Maps Modeling in Urban Environments
这篇文章主要是车道线检测,在实验中提到一些HD Maps的制作过程:开源工具:
mapillary/OpenSfM(https://github.com/mapillary/OpenSfM)
加自己的车道线检测方法LineNet,还有一些后处理。看看一些结果如下: