Hello,朋友们。第二篇博客我们还是接着聊运动规划算法。
上图,图中字母表示不同的地点,数字表示两点之间的距离。我们要找到图中的最短路径,就拿A到E点做例子好了。
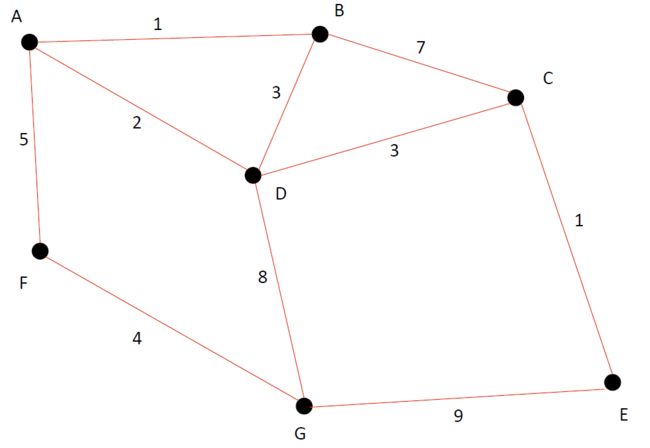
我们的目标是:找到start-end之间的最短路径,如图所示
来吧,Dijkstra-迪杰斯特拉算法,这是一种基于贪心策略的动态规划算法(后面解释这句话),可以用来解决最短路径问题。
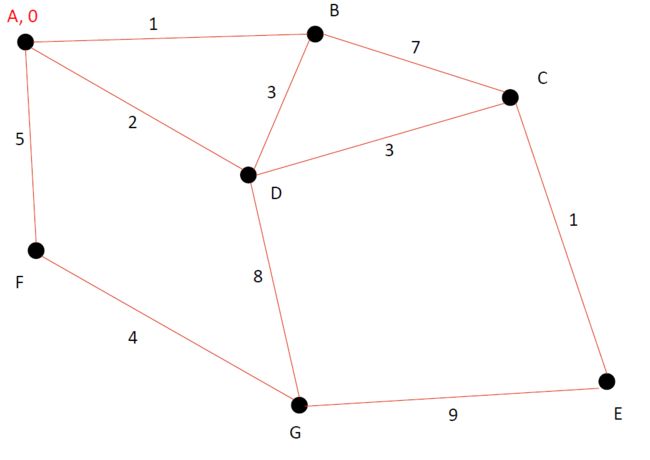
首先把起点的距离设定为0(A到A当然是0距离拉),然后把已经确认该点到起点之间的距离为最短距离的点标红(血统清晰)
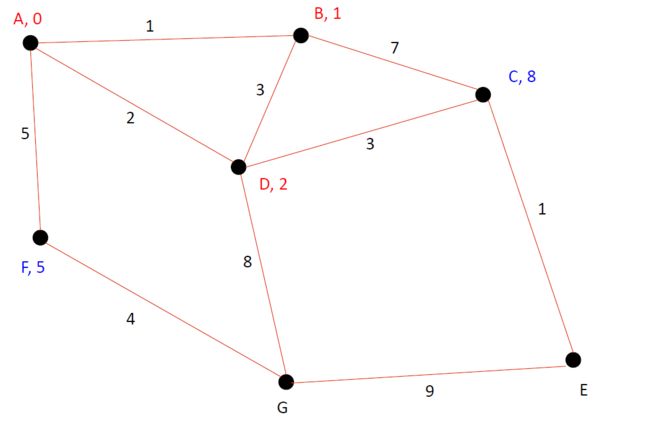
下一步,我们考虑和A相邻的点B,D, F ,把这些候选者们标蓝(血统不明)
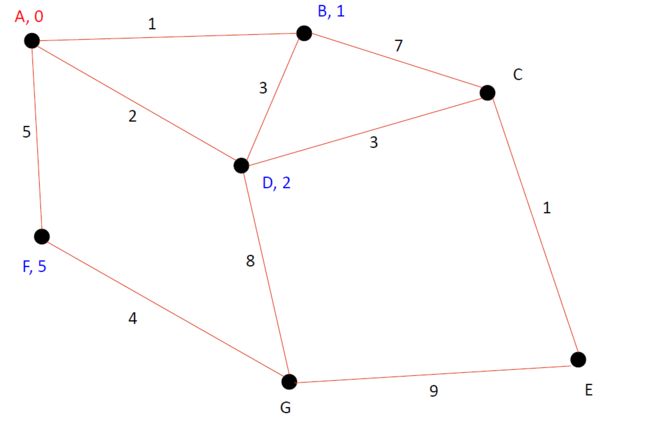
很快我们就确定了A-B之间的最短距离为1,然后呢我们考虑B的相邻下一站C。虽然A-C之间有3条路,A-B-C,A-D-C,A-B-D-C,但是目前我们只确定了A-B之间的最短距离,所以暂定A-C之间的距离为8
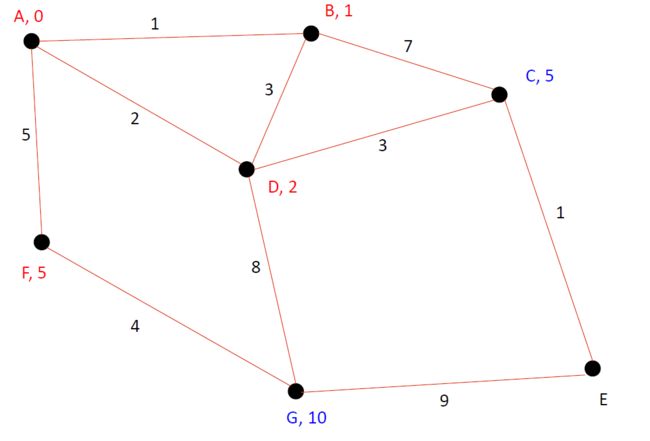
接下里,我们确认A-D最短距离为2。这时候A-C之间的已知的最短距离更新了,为5。感觉越来越接近真相了哈。
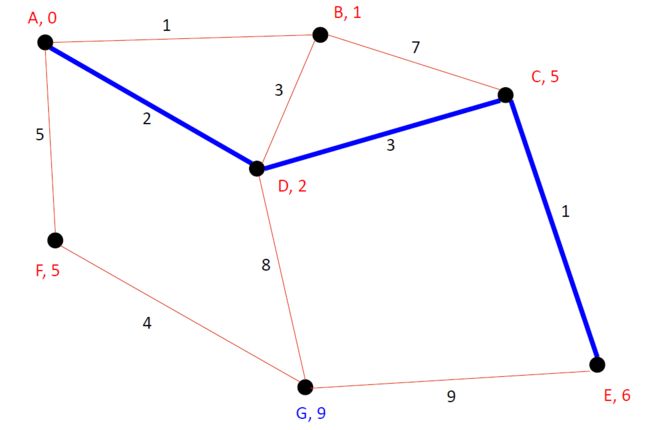
接下来我们再确定了G点和E点后
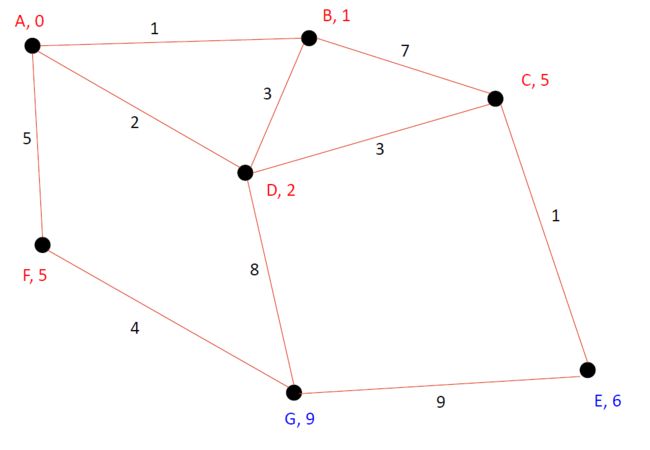
我们最终确认A-E之间的最短距离为6,我们得到了我们的目标图。
总结一下,事实总是逐渐揭露的,追随着永恒的脚步,我独自走在深蓝的的路上说的就是这种算法。
整个过程用伪代码表示就是:
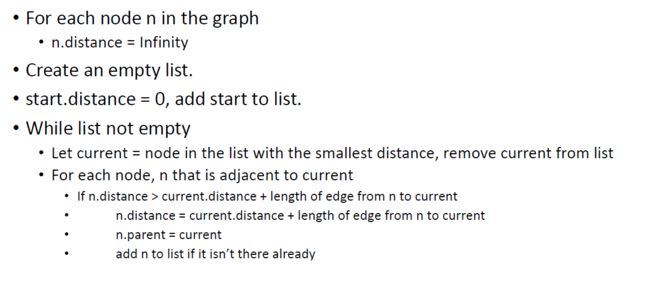
这个算法计算复杂度的问题,从伪代码中我们可以看出,实现需要两层循环,第一层循环遍历所有的结点,第二层循环遍历每个节点周围的路径,所以,比较朴实的实现方法的话,计算复杂度为:
如果我们事先用优先队列PriorityQueue对节点进行排序,可以降低计算复杂度:
其中,V是图中节点的数量,E为路径条数。
一般意义上的贪心算法在对问题求解时,总是做出在当前看来是最好的选择,也就是做出局部最优解。迪杰斯特拉算法只考虑每个节点的最短路径,然后从中再考虑到达相邻节点的最短路径,这符合了贪心策略。同时待求解的问题分解为若干个子问题,前一子问题的解,为后一子问题的求解提供了有用的信息这又符合了动态规划的选择。所以迪杰斯特拉算法是基于贪心策略的动态规划算法,最后求出一定是整体最优解。
下面附上python代码:
from collections import defaultdict
class Graph:
def __init__(self):
self.nodes = set()
self.edges = defaultdict(list)
self.distances = {}
def add_node(self, value):
self.nodes.add(value)
def add_edge(self, from_node, to_node, distance):
self.edges[from_node].append(to_node)
self.edges[to_node].append(from_node)
self.distances[(from_node, to_node)] = distance
self.distances[(to_node, from_node)] = distance
def dijsktra(graph, initial):
visited = {initial: 0}
path = {}
nodes = set(graph.nodes)
while nodes:
min_node = None
for node in nodes:
if node in visited:
if min_node is None:
min_node = node
elif visited[node] < visited[min_node]:
min_node = node
if min_node is None:
break
nodes.remove(min_node)
current_weight = visited[min_node]
for edge in graph.edges[min_node]:
weight = current_weight + graph.distances[(min_node, edge)]
if edge not in visited or weight < visited[edge]:
visited[edge] = weight
path[edge] = min_node
return visited, path
g = Graph()
g.add_node('A')
g.add_node('B')
g.add_node('C')
g.add_node('D')
g.add_node('E')
g.add_node('F')
g.add_node('G')
g.add_edge('A','B',1)
g.add_edge('A','D',2)
g.add_edge('A','F',5)
g.add_edge('B','D',3)
g.add_edge('B','C',7)
g.add_edge('D','C',3)
g.add_edge('D','G',8)
g.add_edge('C','E',1)
g.add_edge('G','E',9)
g.add_edge('F','G',4)
print(dijsktra(g, 'E'))
({'E': 0, 'C': 1, 'G': 9, 'B': 7, 'D': 4, 'A': 6, 'F': 11}, {'C': 'E', 'G': 'E', 'B': 'D', 'D': 'C', 'A': 'D', 'F': 'A'})
另附github上很洋气的解法:
from collections import defaultdict
from heapq import *
def dijkstra(edges, f, t):
g = defaultdict(list)
for l,r,c in edges:
g[l].append((c,r))
q, seen = [(0,f,())], set()
while q:
(cost,v1,path) = heappop(q)
if v1 not in seen:
seen.add(v1)
path = (v1, path)
if v1 == t: return (cost, path)
for c, v2 in g.get(v1, ()):
if v2 not in seen:
heappush(q, (cost+c, v2, path))
return float("inf")
if __name__ == "__main__":
edges = [
('A', 'B', 1),
('A', 'D', 2),
('A', 'F', 5),
('B', 'D', 3),
('B', 'C', 7),
('D', 'C', 3),
('D', 'G', 8),
('C', 'E', 1),
('G', 'E', 9),
('F', 'G', 4)
]
print ("=== Dijkstra ===")
print (edges)
print ("A -> E:")
print (dijkstra(edges, "A", "E"))
=== Dijkstra ===
[('A', 'B', 1), ('A', 'D', 2), ('A', 'F', 5), ('B', 'D', 3), ('B', 'C', 7), ('D', 'C', 3), ('D', 'G', 8), ('C', 'E', 1), ('G', 'E', 9), ('F', 'G', 4)]
A -> E:
(6, ('E', ('C', ('D', ('A', ())))))