论文阅读 2013 — EDCircles: A real-time circle detector with a false detection control
这个文章是2013年圆检测的论文,发表在Pattern Recognition上,代码地址https://github.com/CihanTopal/ED_Lib,这个作者很有意思,除了一系列ED算法,检测直线,检测三角,检测圆等等。
我为什么要读这篇论文,这篇论文应用了LSD和ELSD,基于NFA的算法基本能够很好的去除虚假椭圆,而目前椭圆检测难点也确实在虚假椭圆的去除上,因此这个博客,仅分析方法和实验,介绍和相关结论就不说了。
1 摘要
作者提出了一个实时、无参数的圆检测算法,算法能够有效控制虚假圆的个数。该算法利用了无参数边缘检测算法EDPF产生的连续的边缘段集合,因此该算法被叫做EDCircles。该算法首先利用EDPF计算边缘段,之后转换为直线段。将检测到的直线段转换成圆弧,用两种启发式算法将圆弧连接起来,检测候选圆和近圆椭圆。基于Helmholtz原理,通过一个反向验证步骤对候选点进行验证,消除了只留下有效圆和近圆椭圆的错误检测。实验结果表明,EDCircles实时工作(640480幅图像10-20ms),检测率高,结果准确,非常适合于下一代实时视觉应用,包括成品自动检测、瞳孔检测、环形交通标志检测等。
2 EDCircles
算法流程
- 利用EDPF检测边缘段,提取完整的圆与椭圆。
- 将剩余边缘段转换为直线段。
- 通过组合直线段检测弧段。
- 组合弧段获取圆候选。
- 组合剩余弧度来检测近似椭圆候选。
- 使用Helmholtz原理验证候选圆与椭圆。
- 输出结果。
2.1 利用EDPF检测边缘段
Canny 通过识别图像中的一组潜在边缘像素,并通过非最大抑制、滞后阈值化、腐蚀等操作消除非边缘像素。
论文使用的边缘检测方法ED采用了一种主动的方法,首先确定图像中的一组点,称为锚点(anchors),然后使用智能路由过程连接这些锚点;也就是说,ED实际上在图像中绘制边缘。ED不仅输出一个类似于传统边缘检测器输出的二值边缘图,而且还输出一组边缘段,每个边缘段是一个连续的(连接的)像素链。
ED有许多必须由用户设置的参数,这需要为不同类型的图像进行调参。EDPF利用了反向边缘验证机制,是一种无参数的边缘检测,能够去除虚假边缘,留下有意义的边缘。
下图是利用EDPF的检测结果,每个弧段用不同颜色表示出来。值得注意的是,场景中有很多封闭的圆合椭圆,因此在边缘提取之后,可以先验证封闭的轮廓。先利用圆你和算法对图形进行你和,如果你和误差小于1.5,那么将这个圆添加到候选中(误差小并不代表这个是实际的圆,还需要进一步的验证),如果圆拟合失败,再进行椭圆拟合,通过则扔进候选里。扔进候选里的弧段将不会参与后续的流程中。

之后,对于剩下的边缘段,作者使用EDLines算法对每个边缘段进行逼近,与EDLines不同,逼近后不会对弧段进行验证,产生的所有直线段将会在后续工作中处理。
2.2 圆弧段检测
算法约束每个圆弧段至少有3条直线段。分割过程与别的椭圆检测算法是相似的,若一对直线段之间的角度变化率过大或过小,都不会被认为是一个圆弧段,根据这个约束确定分割点,而且圆弧段的角度弯曲方向必须是一致的,这些都可以利用向量的内积外积来计算。根据实验,作者认为变化的角度在 [ 0 ∘ , 6 0 ∘ ] [0^\circ,60^\circ] [0∘,60∘]之间得到的圆弧段是最好的。
对提取出的一个弧段,直接进行圆你和,如果拟合误差<1.5pix,那么就将这个弧段添加到后选中。否则,先从3个弧段开始,一个一个的拟合,直到拟合误差超过1.5像素。
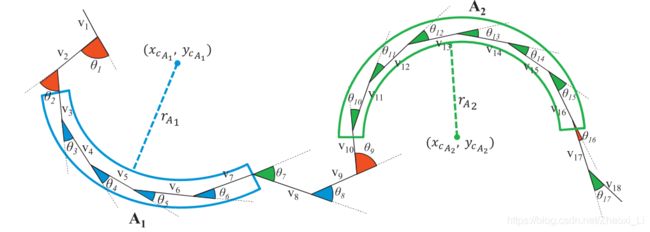
下图是最终的弧段提取结果,注意到有个虚假的椭圆候选,之后的验证会精准去除。

这个表格给出了每个弧段拟合之后的圆心、半径和弧段的启示结束角度(个人观点:小弧段拟合时候,对噪声异常敏感,根本不像这个表格给的这么近似,根据每个弧段的相似来组合是不靠谱的,改进时候也不要基于这个改进了,小弧段拟合误差敏感,不适用。)

2.3 组合弧段来检测候选圆和近圆椭圆
个人观点:不推荐这种组合方法,该论文是2013年的,建议多看看近几年的论文,组合算法本身就是椭圆检测的关键过程,近几年已经有了很多经典的算法。
首先根据弧段的长度来对弧段进行排序。之后先从最长的弧段开始扩展,扩展时候基于两个准则:
- 半径差异约束:两个弧段之间拟合出的半径差异在阈值内。比如弧段差异不能超过A1半径的25%
- 圆心距离约束。两个弧段的拟合圆心之间的距离在阈值内。比如圆心距离不能超过A1半径的25%。
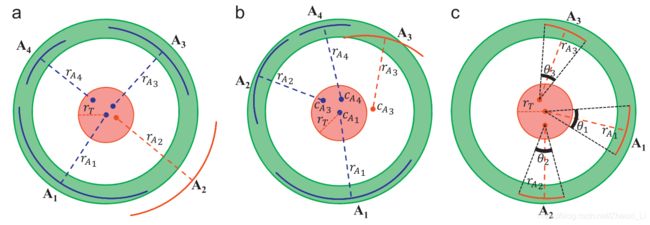
下图是个示例,(a) 满足圆心约束,却不满足半径约束;(b)满足半径约束却不满足圆心约束。© 都满足,但是组合张量小于圆的一半。
得到一个组合之后,进行拟合,如果参与拟合的弧段角度张量超过圆的一半,则作为一个圆候选,否则这些弧段留下来做近圆椭圆检测。
剩余的弧段用于进行近圆检测,思路与圆检测相似,都是用了圆心约束和半径约束,细节这里不说了(毕竟近几年已经有了更好的组合算法)。
2.4 利用Helmholtz准则验证圆和椭圆
先定义Helmholtz准则,为它的反向验证框架奠定基础,并描述它是如何在给定的图像中检测有意义的对齐段,也就是线段。
Helmholtz原理简单地说,对于一个具有感知意义的几何结构来说,在随机情况下,这种结构(分组或格式塔)偶然出现的期望必须非常低。这是一种相反contrario的方法,对象被检测为背景的异常值。如Desolneux等人所说的,一个合适的背景模型是所有像素都是独立的。最简单的这种模型是高斯白噪声。换句话说,在高斯白噪声图像中没有可感知的有意义的结构,]Desolneux等人使用Helmholtz原理在给定图像中找到有意义的对齐段alignments,即线段,不需要任何参数。他们的想法是计算给定图像的水平线方向场(与梯度方向场正交),并寻找具有相似水平线方向的连续像素集。
下图(a)展示了一张图的水平线方向场,组成线段的对齐像素标记在矩形内,作者定义了对齐的含义如下:两个点(或直线段) P , Q P,Q P,Q在精度 p = 1 / n p=1/n p=1/n下有相同的方向,即对其,如果 a n g l e ( P ) , a n g l e ( Q ) angle(P), angle(Q) angle(P),angle(Q)彼此相差 p π = π / n p\pi=\pi/n pπ=π/n度。Desolneux等人指出,与心理学和数值实验一直, n n n的实际值在32到4之间,考虑更大的n是没用的。在EDCircles中,选择 n = 8 n=8 n=8,也就是认为方向差异在 22. 5 ∘ 22.5^\circ 22.5∘以内是对其的。

用Helmholtz原理进行验证,Desolneux等人定义了直线段的NFA(number of false alarms):在一个尺寸为 N × N N\times N N×N的图像下,直线段 L L L长度为 n n n,且至少有 k k k个点与直线段方向对齐。定义 L L L的NFA如下:
N F A ( n , k ) = N 4 ∑ i = k n C n k p i ( 1 − p ) n − i NFA(n,k)=N^4\sum_{i=k}^nC^k_np^i(1-p)^{n-i} NFA(n,k)=N4i=k∑nCnkpi(1−p)n−i
其中 N 4 N^4 N4表示潜在的直线段个数(我觉得这里有点扯,实际上潜在直线段个数应该是 C N 2 2 C^2_{N^2} CN22,如果说数量级是4次,倒是能理解)。这里的 p = 1 / 8 p=1/8 p=1/8就是前面表示的对其值。如果 N F A ( n , k ) ≤ ϵ NFA(n,k)\leq \epsilon NFA(n,k)≤ϵ,则接受这个直线段,否则拒绝。作者给的建议是 ϵ = 1 \epsilon=1 ϵ=1
(个人理解:作者认为直线段是否有效与图像尺寸相关,的确,越大的图像小的直线越被认定为噪声,但是对于ROI图像,或遥感图像,感觉这种常识就没意义,所以NFA这个思路确实很好,但是应该有些改进,应该只考虑局部直线段是不是即可)
将该思想应用在圆检测上,其思想非常简单:就像一组相邻的像素(其水平线角度与线段对齐)构成线段一样,一组相邻的像素(其水平线角度与圆对齐)构成圆。上图(b)示出了图像的水平线方向场,其中构成圆的对齐像素被标记在两个圆内。为了定义像素和圆之间的对齐方法,给出了如下定义:如果在圆的边界上的像素点 P P P与对应的圆的切向方向对齐,则称 P P P与圆对齐。上图(c)显示了圆边界上几个点的梯度方向(垂直于水平线角度),其中一些点与圆对齐,而一些点与圆不对齐。灰色三角形表示理想梯度方向和观测梯度方向之间的差异,如果观测梯度方向在圆锥内部,则假定该点与圆对齐,否则假定该点与圆不对齐。为了区别圆和椭圆,对于椭圆使用 N F A ( n , k ) = N 5 ∑ i = k n C n k p i ( 1 − p ) n − i NFA(n,k)=N^5\sum_{i=k}^nC^k_np^i(1-p)^{n-i} NFA(n,k)=N5∑i=knCnkpi(1−p)n−i
3 实验结果
下图是几个实验结果:
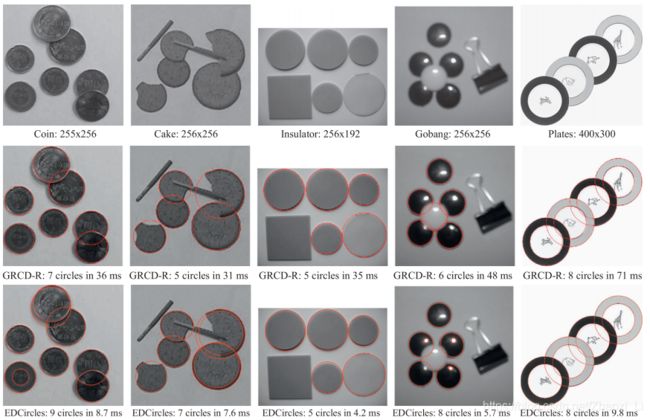
13年时候,算法量化没有这么标准,基本都是疯狂放图,整体上看,EDCircles确实有了质的提升。
4 总结
根据这篇论文,我个人提出几个自己的看法。
- 1 边缘检测可以参考论文提出的EDPF的方法,但是多边形逼近,最好用2012年Prasad提出的自适应逼近。
- 2 弧段分割思想很通用,没什么特殊的。
- 3 组合思想,不建议使用了,近几年已经有了更好的,这个组合方法有很大限制的。
- 4 验证思想,非常好,我目前也在研究这个点,感觉基于仿生和心理学的视觉验证才是方向。